数据结构初阶:算法复杂度
文章目录
-
-
- 算法复杂度
-
- 复杂度概念
- 时间复杂度
-
- 时间复杂度定义
- 大O渐进表示法
-
- 大O阶的推导规则
- Example 1
- Example 2
- Example 3
- Example 4
- Example 5
- Example 6
- 空间复杂度
-
- 空间复杂度定义
-
- Example 1
- Example 2
- Example 3
- Example 4
- 常见复杂度
- 复杂度OJ题
-
- 消失的数字
-
- 思路 1
- 思路 2
- 思路 3
- 思路 4
- 旋转数组
-
- 思路 1
- 思路 2
- 思路 3
-
算法复杂度
复杂度概念
程序的运行时需要耗费一定的时间资源和空间(内存)资源 。因此衡量一个算法的好坏,一般是从时间和空间两个维度来衡量的,即时间复杂度和空间复杂度。
时间复杂度主要衡量一个算法的运行快慢,而空间复杂度主要衡量一个算法运行所需要的额外空间。在计算机发展的早期,计算机的存储容量很小,所以对空间复杂度很是在乎。现如今计算机的存储容量已经达到了很高的程度,已不需要再特别关注一个算法的空间复杂度。
时间复杂度
时间复杂度定义
算法的时间复杂度是一个函数,它定量描述了该算法的运行时间。从理论上说,算法执行所耗费的具体时间是不能算出来的,而即使真实测算出程序的运行时间,也因如机器的性能等种种原因无法描述算法的优劣。
而且机器测算过于繁琐,所以才有了时间复杂度这个分析方式。时间复杂度不计算具体时间而是算法中的基本操作的执行次数。找到某条基本语句与问题规模 N N N 之间的数学表达式,就是算出了该算法的时间复杂度。
如下列代码:计算代码中++count语句的执行次数。
void Func(int N) {
int count = 0;
for (int i = 0; i < N; ++i) {
for (int j = 0; j < N; ++j) {
++count;
}
}
for (int k = 0; k < 2 * N; ++k) {
++count;
}
int M = 10;
while (M--) {
++count;
printf("hehe\n");
}
}
从数学角度看,算法的时间复杂度其实就是一个关于N的数学函数,如本题就是 F ( N ) = N 2 + 2 N + 10 F(N)=N^2+2N+10 F(N)=N2+2N+10。
大O渐进表示法
当N=10时F(N)=130,当N=100时F(N)=10210,当N=1000时F(N)=1002010。
可以看出如此精确的函数式在实际应用中,并没有多大作用,只需要大概次数即可。当代码的执行次数大到一定程度时,等式后面小项的影响就变得很小,保留最大项也就基本确定了结果。为了更方便的计算和描述算法的复杂度,故提出了大O渐进表示法。
大O阶的推导规则
大O符号:用于描述函数渐进行为的数学符号。
- 执行次数与N无关且为常数次时,用常数1表示。
- 只保留运行次数函数中舍去系数的最高阶项。
- 若算法存在最好最坏情况,则关注最坏情况。
由此可得上述算法时间复杂度的大O阶为 O ( N 2 ) O(N^2) O(N2)。
Example 1
void Func1(int N, int M) {
int count = 0;
for (int k = 0; k < M; ++k) {
++count;
}
for (int k = 0; k < N; ++k) {
++count;
}
printf("%d\n", count);
}
本题的时间复杂度是 O ( N + M ) O(N+M) O(N+M),若标明 N > > M N>>M N>>M 则复杂度是 O ( N ) O(N) O(N),反之则是 O ( M ) O(M) O(M),若标明二者相近则是 O ( N ) O(N) O(N)或 O ( M ) O(M) O(M)。若 M M M , N N N 都是已知常数,则复杂度是 O ( 1 ) O(1) O(1)。
一般通常用 N N N 表示未知数,但 M M M , K K K 等等也行。
Example 2
void Func2(int N) {
int count = 0;
for (int k = 0; k < 100; ++ k) {
++count;
}
printf("%d\n", count);
}
本题的运行次数是常数次,不管该常数多大,时间复杂度都是 O ( 1 ) O(1) O(1) 。
Example 3
void BubbleSort(int* a, int n) {
assert(a);
for (size_t end = n; end > 0; --end) {
int exchange = 0;
for (size_t i = 1; i < end; ++i) {
if (a[i - 1] > a[i]) {
Swap(&a[i - 1], &a[i]);
exchange = 1;
}
}
if (exchange == 0)
break;
}
}
有的算法会有最好情况,最坏情况。对于复杂度的计算我们通常采用最坏的情况作悲观预期。很少有算法会看平均情况。
冒泡排序就是其中之一,我们对其最差的情况分析。相邻两数相比,第一趟交换 N − 1 N-1 N−1 次,第二趟交换 N − 2 N-2 N−2 次,……,第 i i i 趟交换 N − i N-i N−i 次。故精确的算法次数应为 F ( N ) = N − 1 + N − 2 + . . . + N − i + . . . + 1 + 0 = N × ( N − 1 ) / 2 F(N)=N-1+N-2+...+N-i+...+1+0=N×(N-1)/2 F(N)=N−1+N−2+...+N−i+...+1+0=N×(N−1)/2 。故复杂度为 O ( N 2 ) O(N^2) O(N2) 。

也可以看比较的次数,由于每趟最后一次只比较不交换,所以每趟比较的次数都比交换的次数多一次。但是并不影响其的复杂度。
Example 4
int BinarySearch(int* a, int n, int x) {
assert(a);
int begin = 0;
int end = n - 1;
while (begin < end) {
int mid = begin + ((end - begin) >> 1);
if (a[mid] < x)
begin = mid + 1;
else if (a[mid] > x)
end = mid;
else
return mid;
}
return -1;
}
计算算法的复杂度不可仅看循环的层数,还要看算法的思想。 二分查找同样具有最好情况和最坏情况,仍然要对其最坏情况(找不到)进行分析。

对于这样的每次折半的情况,可以形象的用“折纸法”理解,一张纸对折一次去掉一半再对折再舍弃,假设一共折了 x x x 次,就找到了该数字。也就是 2 x = N 2^x=N 2x=N,所以次数 x = l o g 2 N x=log_2N x=log2N 。
对数阶 O ( l o g 2 N ) O(log_2N) O(log2N),也可以省略底数写成 O ( l o g N ) O(logN) O(logN)。二分查找这个对数阶是非常优秀的算法, 20 = l o g 2 ( 1000000 ) 20=log_2(1000000) 20=log2(1000000),一百万个数仅需查找20次。
Example 5
long Factorial(size_t N)
{
if (0 == N)
return 1;
return Fac(N - 1) * N;
}
递归算法的复杂度取决于两个因素:递归深度和每次递归调用次数。
递归深度即是一共递归的层数,也就是创建栈帧的次数。每次递归调用次数是递归函数内调用自身的次数。
显然本题的深度是 O ( N ) O(N) O(N),调用次数是 1 1 1,故复杂度是 O ( N ) O(N) O(N) 。
Example 6
long Fibonacci(size_t N)
{
if(N < 3)
return 1;
return Fib(N-1) + Fib(N-2);
}
斐波那契递归的思想是类似于二叉树的,但是后面缺少了一部分,如图所示:
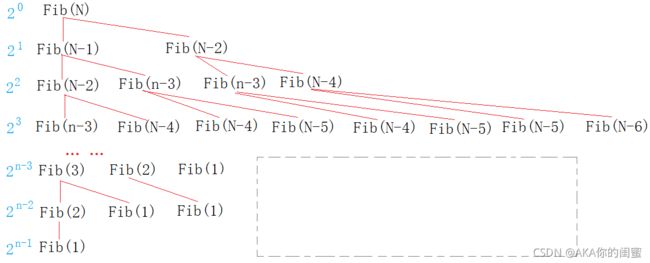
如果没有缺失的话就是完整二叉树,将缺少的部分设为 X X X,精确次数就是 F ( N ) = 2 0 + 2 1 + 2 2 + . . . + 2 N − 1 − X = 2 N − 1 − X F(N)=2^0+2^1+2^2+...+2^{N-1}-X=2^N-1-X F(N)=20+21+22+...+2N−1−X=2N−1−X,由于 X X X远小于 2 N − 1 2^N-1 2N−1,故算法复杂度为 O ( N ) = 2 N O(N)=2^N O(N)=2N。
空间复杂度
空间复杂度定义
空间复杂度也是数学表达式,度量算法运行时临时额外占存空间的大小。同样空间复杂度不是无意义的实际占用的字节数,空间复杂度计算临时开辟变量的个数。基本规则规则和时间复杂度类似,也采用大O渐进表示法。
Example 1
void BubbleSort(int* a, int n) {
assert(a);
for (size_t end = n; end > 0; --end) {
int exchange = 0;
for (size_t i = 1; i < end; ++i) {
if (a[i - 1] > a[i]) {
Swap(&a[i - 1], &a[i]);
exchange = 1;
}
}
if (exchange == 0)
break;
}
}
冒泡排序算法仅创建了常数个变量,所以空间复杂度是 O ( 1 ) O(1) O(1)。
虽然变量
end,i每次循环都创建一次,但其实从内存角度看,每次所占空间并不会发生变化,一般都开辟在同一块空间。
Example 2
long long* Fibonacci(size_t n) {
if (n == 0)
return NULL;
long long* fibArray = (long long*)malloc((n + 1) * sizeof(long long));
fibArray[0] = 0;
fibArray[1] = 1;
for (int i = 2; i <= n; ++i) {
fibArray[i] = fibArray[i - 1] + fibArray[i - 2];
}
return fibArray;
}
包括循环变量和该斐波那契数组,开辟量级为 N N N个的变量。故空间复杂度为 O ( N ) O(N) O(N) 。
Example 3
long long Factorial(size_t N)
{
if(N == 0)
return 1;
return Fac(N - 1) * N;
}
每次递归创建一个栈帧,每个栈帧中都是常数个变量, N N N次递归的空间复杂度为 O ( N ) O(N) O(N) 。
递归的空间复杂度与递归深度有关。
Example 4
long Fibonacci(size_t N)
{
if(N < 3)
return 1;
return Fib(N-1) + Fib(N-2);
}
斐波那契每次递归同样创建常数个变量,从斐波那契栈帧创建图中可以看出,递归中会有重复的项,这些重复的栈帧创建又销毁。空间不同于时间是可以重复利用的,所以这些重复的栈帧仅占用一次的空间。所以 F i b ( N ) Fib(N) Fib(N), F i b ( N − 1 ) Fib(N-1) Fib(N−1),…, F i b ( 1 ) Fib(1) Fib(1)这些栈帧都分配一次的空间足矣。故时间复杂度为 O ( N ) O(N) O(N) 。
常见复杂度
常见的算法复杂度如下表,复杂度由上到下依次递增:
| 简称 | 大O表示 | 示例 |
|---|---|---|
| 常数阶 | O ( 1 ) O(1) O(1) | k k k |
| 对数阶 | O ( l o g n ) O(logn) O(logn) | k l o g 2 n klog_2n klog2n |
| 线性阶 | O ( n ) O(n) O(n) | k n kn kn |
| 对数阶 | O ( n l o g n ) O(nlogn) O(nlogn) | k l o g 2 n klog_2n klog2n |
| 平方阶 | O ( n 2 ) O(n^2) O(n2) | k n 2 kn^2 kn2 |
| 立方阶 | O ( n 3 ) O(n^3) O(n3) | k n 3 kn^3 kn3 |
| 指数阶 | O ( 2 n ) O(2^n) O(2n) | k 2 n k2^n k2n |
| 阶乘阶 | O ( n ! ) O(n!) O(n!) | k n ! kn! kn! |

最低的是常数次 O ( 1 ) O(1) O(1),其次是对数阶 O ( l o g n ) O(logn) O(logn),然后是线性阶 O ( n ) O(n) O(n),再高就是平方阶 O ( n 2 ) O(n^2) O(n2),最大是指数阶 O ( 2 n ) O(2^n) O(2n) 。前三个算是优秀算法,而平方阶是算是复杂的算法,指数阶阶乘阶的算法万万不可取。
复杂度OJ题
消失的数字
思路 1
先排序数组,检查排序结果相邻元素的差值。若差值不为1二者之间的缺值就是消失的数字。
时间复杂度为 O ( n l o g 2 n ) O(nlog_2n) O(nlog2n),空间复杂度 O ( 1 ) O(1) O(1)
int cmp_int(const void* e1, const void* e2) {
return *(int*)e1 - *(int*)e2;
}
int missingNumber(int* nums, int numsSize) {
int flag = 1;
//qsort
qsort(nums, numsSize, sizeof(nums[0]), cmp_int);
//元素个数为1
if (numsSize == 1) {
return numsSize - nums[0];
}
for (int i = 0; i < numsSize - 1; i++) {
if (nums[i +1] - nums[i] != 1) {
flag = 0;
return nums[i] + 1;
}
}
//缺失的数字为最大值或0
if (flag == 1) {
if (nums[0] == 0) {
return numsSize;
}
else {
return 0;
}
}
return 0;
}
思路 2
将数组中的元素写到另一个数组的对应下标位置上,没有值的位置下标即为消失的数字。
时间复杂度为 O ( n ) O(n) O(n),空间复杂度 O ( n ) O(n) O(n)
int missingNumber(int* nums, int numsSize) {
int tmp[200000] = { 0 };
memset(tmp, -1, 200000 * sizeof(int));
//移入元素
for (int i = 0; i < numsSize; i++) {
tmp[nums[i]] = nums[i];
}
//寻找位置
for (int i = 0; i <= numsSize; i++) {
if(tmp[i] == -1) {
return i;
}
}
return 0;
}
思路 3
将0到n的元素之和减去数组元素之和,得到的结果即为消失的数字。
时间复杂度为 O ( n ) O(n) O(n),空间复杂度 O ( 1 ) O(1) O(1)
int missingNumber(int* nums, int numsSize) {
int sumOfNum = 0;
int sumOfNums = 0;
for (int i = 0; i <= numsSize; i++) {
sumOfNum += i;
}
for (int i = 0; i < numsSize; i++) {
sumOfNums += nums[i];
}
return sumOfNum - sumOfNums;
}
思路 4
将 x x x与 [ 0 , n ] [0,n] [0,n] 的数字遍历异或,在与数组元素遍历异或,最后结果即为消失的数字。
时间复杂度为 O ( n ) O(n) O(n),空间复杂度 O ( 1 ) O(1) O(1)
int missingNumber(int* nums, int numsSize) {
int xor = 0;
//和[0,n]异或
for (int i = 0; i <= numsSize; i++) {
xor ^= i;
}
//和数组异或
for (int i = 0; i < numsSize; i++) {
xor ^= nums[i];
}
return xor;
}
旋转数组
思路 1
数组尾删一次在头插原数组的尾元素,循环 k k k 次。
时间复杂度为 O ( k × n ) O(k×n) O(k×n),空间复杂度 O ( 1 ) O(1) O(1)
void rotate(int* nums, int numsSize, int k) {
while (k--) {
int tmp = nums[numsSize - 1];
int end = numsSize - 1;
while (end > 0) {
nums[end] = nums[end - 1] ;
end--;
}
nums[end] = tmp;
}
}
思路 2
开辟同等大小的数组,后 n − k n-k n−k 个元素先转移过去,在转移前 k k k 个元素,在返回数组。
时间复杂度为 O ( n ) O(n) O(n),空间复杂度 O ( n ) O(n) O(n)
void rotate(int* nums, int numsSize, int k) {
int tmp[200] = { 0 };
//后k个
for (int i = 0; i < k; i++) {
tmp[i] = nums[numsSize - k + i];
}
//前k个
for (int i = 0; i < numsSize - k; i++) {
tmp[i + k] = nums[i];
}
//转移
for (int i = 0; i < numsSize; i++) {
nums[i] = tmp[i];
}
}
思路 3
前 n − k n-k n−k 个元素逆置,后 k k k 个元素逆置,再整体逆置。
时间复杂度为 O ( n ) O(n) O(n),空间复杂度 O ( 1 ) O(1) O(1)
void reserve(int* nums, int left, int right) {
while (left < right) {
int tmp = nums[left];
nums[left] = nums[right];
nums[right] = tmp;
left++;
right--;
}
}
void rotate(int* nums, int numsSize, int k) {
//1. 前n-k个逆置
reserve(nums, 0, numsSize -k - 1);
//2. 后k个逆置
reserve(nums,numsSize - k, numsSize - 1);
//3. 再整体逆置
reserve(nums, 0, numsSize - 1);
}