一文详解PnP算法原理
PnP(Perspective-n-Point)问题的几何结构如图1所示,给定3D点的坐标、对应2D点坐标以及内参矩阵,求解相机的位姿。
数学语言描述如下:

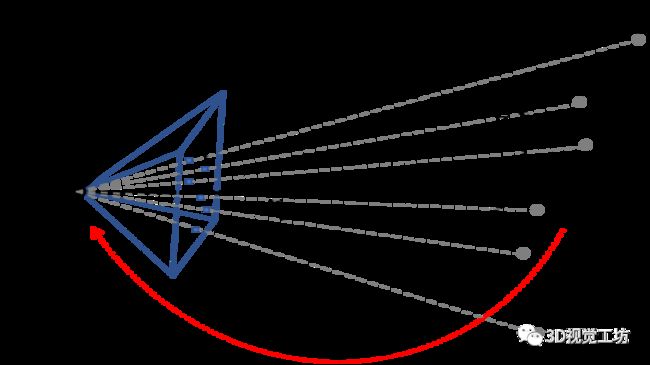
图1.PnP几何结构
1.直接线性变换法(Direct Linear Transform,DLT)
假设:摄像机已经校准过了。
已知:

求解相机的外参:R、t
透视投影模型为:
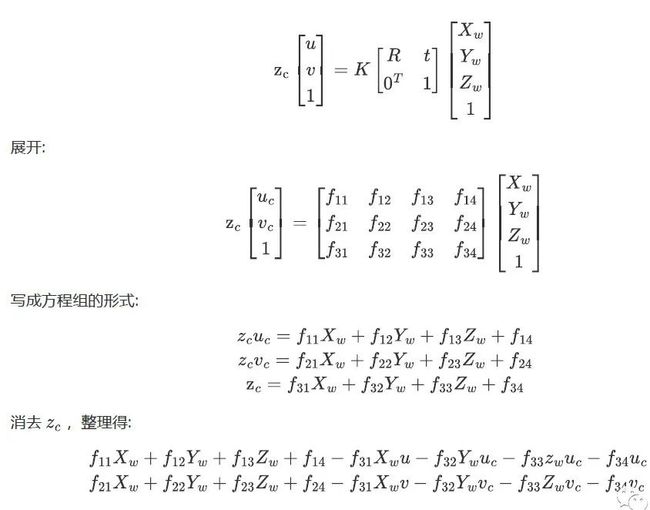
每组3D-2D匹配点对应两个方程,一共有12个未知数,至少需要6组匹配点。
设有N组匹配点,则:

上式写成矩阵形式:
AF=0
当N=6时,可以直接求解线性方程组。

因此, 旋转矩阵, 平移矩阵求得:

2.P3P
P3P问题是已知三个3D目标点与其2D投影之间的对应关系,来确定标定相机的位姿问题。


图2.两点约束


注:直接线性变换法,只考虑了线性意义下的最优解,没有考虑几何约束。而P3P考虑了三角约束,给出三角约束意义下的最优解
2.1 Zero Structure for the P3P Equation System
文章[1]:Complete Solution Classification for the Perspective-Three-Point Problem
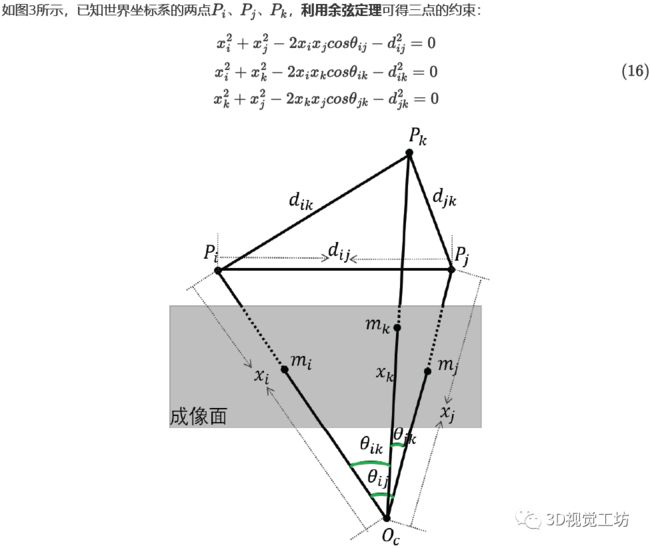
图3.三点约束
对于公式(16)的变量有一些真实的约束:

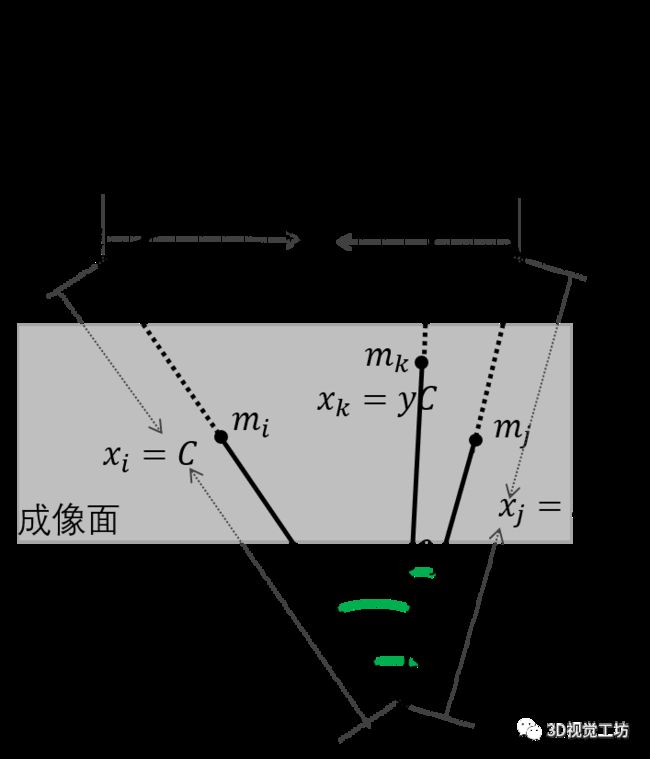
图4.三点约束--重定义边长
公式(17)消去C、v,得ES:

2.2 PST
文章[2]:A Stable Direct Solution of Perspective-Three-Point Problem
使用相似三角形,利用几何约束来减少未知参数的个数,把P3P方程组转化为四次方程,该称为透视相似三角形方法(Perspective Similar Triangle ,PST)。
(1)P3P问题转为PST问题


图5.P3P几何结构
(2)PST的求解


图6.PST几何结构
约束1:相似三角形对应边成比例

所以:



(3)PST多解和缺解问题
由PST(perspective similar Triangle)求解,可得方程组等效转换为四次多项式

多解问题:
由于存在多组解,相机位姿不能从3点集唯一确定的。解的个数直接对应于四次多项式实根的个数。要得到唯一的解,至少还应引入一点,构建2个三角形,进行求解。另一种方法是RANSAC算法,该算法将点集划分为3个点子集,检查这些子集的一致性。
RANSAC算法参考文献:Random Sample Consensus: A Paradigm for Model Fitting with Apphcatlons to Image Analysis and Automated Cartography
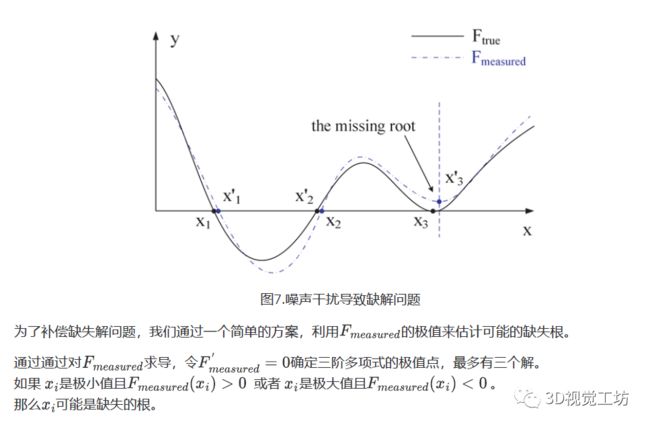
缺解问题:

缺解问题是由P3P的固有结构决定的,其他P3P方法,如迭代解法、几何解法和分类法,也有同样的问题。

3.RPnP
文章[3]:A Robust O(n) Solution to the Perspective-n-Point Problem

下面来看一下,如何建立新的正交坐标系,以及如何求解正交坐标系到相机坐标系之间[R T]。
3.1确定旋转轴
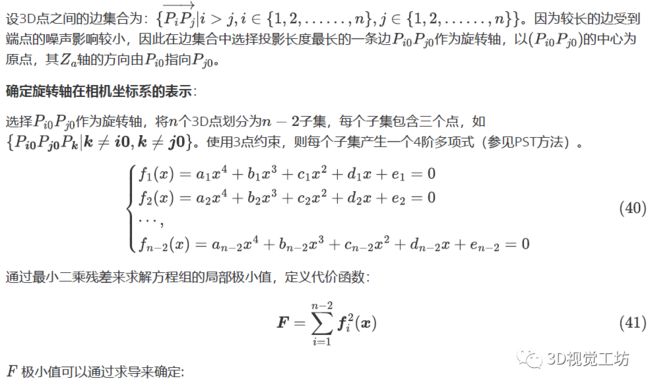

当确定旋转轴时,只需求解剩余的旋转和三个平移参数,减少了未知变量的数量,来提高方程组的数值精度。
3.2求解旋转角和平移矢量的方程
相机坐标系与新坐标系绕之间的旋转矩阵:


其中,

3.3获取相机的位姿

再获取到相机坐标系与新坐标系绕之间的旋转和平移矩阵,进而可直接相机坐标系与世界坐标系绕之间旋转和平移矩阵,即相机的位姿。
引文:
[1] Gao, X. S. , et al. "Complete solution classification for the perspective-three-point problem." IEEE Transactions on Pattern Analysis & Machine Intelligence 25.8(2003):930-943.
[2] Li, S. , and X. Chi . "A Stable Direct Solution of Perspective-Three-Point Problem." International Journal of Pattern Recognition and Artificial Intelligence 25.5(2011):627-642.
[3] Li, S. , X. Chi , and X. Ming . "A Robust O(n) Solution to the Perspective-n-Point Problem." IEEE Transactions on Pattern Analysis and Machine Intelligence (2012).
[4]W. Press, S. Teukolsky, W. Vetterling, and B. Flannery,Numerical Recipes:The Art of Scientific Computing.Cambridge Univ. Press, 2007.
[5]S. Umeyama, “Least-Squares Estimation of Transformation Parameters between Two Point Patterns,”IEEE Trans. Pattern Analysis and Machine Intelligence,vol. 13, no. 4, pp. 376-380, Apr. 1991.
备注:作者也是我们「3D视觉从入门到精通」知识特邀嘉宾:一个超干货的3D视觉学习社区
原创征稿
初衷
3D视觉工坊是基于优质原创文章的自媒体平台,创始人和合伙人致力于发布3D视觉领域最干货的文章,然而少数人的力量毕竟有限,知识盲区和领域漏洞依然存在。为了能够更好地展示领域知识,现向全体粉丝以及阅读者征稿,如果您的文章是3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、硬件选型、求职分享等方向,欢迎砸稿过来~文章内容可以为paper reading、资源总结、项目实战总结等形式,公众号将会对每一个投稿者提供相应的稿费,我们支持知识有价!
投稿方式
邮箱:[email protected] 或者加下方的小助理微信,另请注明原创投稿。

▲长按加微信联系

▲长按关注公众号