【数字图像处理】实验三 图像分割(MATLAB实现)
目录
一、实验意义及目的
二、实验内容
三、Matlab 相关函数介绍
四、算法原理
五、参考代码及扩展代码流程图
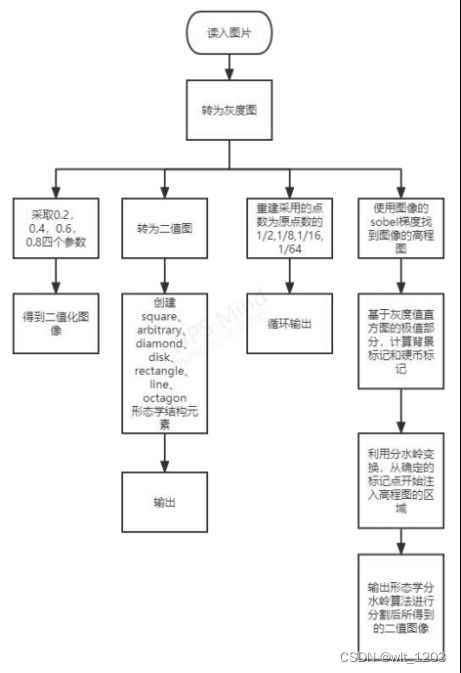
(1)参考代码流程图
(2)扩展代码流程图
六、参考代码
七、实验要求
(1)尝试不同的阈值选择方法,实现灰度图像二值化
(2)变换参数实现形态学滤波,查看滤波效果
(3)更改重建边界点数,查看效果
(4)自行设计方法实现图像分割,并计算分割区域相关参数
一、实验意义及目的
二、实验内容
三、Matlab 相关函数介绍
ifft2(F):对 F 进行二维 IDFT 运算。
四、算法原理
图像分割是指把一副图像分成不同的具有特定性质区域的图像处理技术,将这些区域提取出来以便进一步提取特征,是由图像处理到图像分析的关键步骤。图像分割由于其重要性一直是图像处领域的研究重点。其中阈值分割方法是根据图像灰度值的分布特性确定某个阈值来进行图像分割的一种方法。设原灰度图像为 f (x, y) ,通过某种准则选择一个灰度值T 作为阈值,比较各像素值与T 的大小关系:像素值大于等于T 的像素为一类,变更像素值为 1;像素值小于T 的像素点为另一类,变更其像素值为 0。公式如下:

而边界跟踪是指根据某些严格的“探测准则”找出目标物体轮廓上的像素,即确定边界的起 始搜索点。在根据一定的“跟踪准则”找出目标物体上的其他像素,直到符合跟踪终止条件。
边界描述是指用相关方法和数据来表示区域边界。边界描述中既含有几何信息,也含有丰富的形状信息,是一种很常见的图像目标描述方法。傅里叶描绘子的方法主要利用 DFT描绘子重建区域边界曲线。由于傅里叶的高频分量对应于一些细节部分,而低频分量则对应基本形状,因此,重建时可以只使用复序列的前 M 各较大系数其余置零。
关于图像分割,就不得不提起经典又传统的分水岭算法了。传统的分水岭分割算法,是一种基于拓扑理论的数学形态学的分割方法,传统的分水岭分割方法,是一种基于拓扑理论的数学形态学的分割方法。传统的分水岭分割方法,是一种基于拓扑理论的数学形态学的分割方法,其基本思想是把图像看作是测地学上的拓扑地貌,图像中每一像素的灰度值表示该点的海拔高度,每一个局部极小值及其影响区域称为集水盆地,而集水盆地的边界则形成分水岭。分水岭的概念和形成可以通过模拟浸入过程来说明。在每-一个局部极小值表面,刺穿一个小孔,然后把整个模型慢慢浸人水中,随着浸入的加深, 极小值表面,每一个局部极小值的影响域慢慢向外扩展,在两个集水盆地汇合处构筑大坝如下每一个局部极小值的影响域慢慢向外扩展,在两个集水盆地汇合处构筑大坝如下图所示,即形成分水岭。分水岭变换通过不同的水系排水来分离区域,达到图像图所示,即形成分水岭.分水岭变换通过不同的水系排水来分离区域,达到图像分割的目的。
五、参考代码及扩展代码流程图
(1)参考代码流程图

(2)扩展代码流程图
六、参考代码
Image1=im2double(imread('plane.jpg'));
gray=rgb2gray(Image1);
T=graythresh(gray);%使用 Otsu 方法获取阈值,T 被归一化到[0,1]区间。
BW=im2bw(gray,T);%以 T 为阈值把灰度图像 I 转变为二值图像。
figure,imshow(BW),title('二值化图像');
SE=strel('square',3);%创建一个由square指定的结构元素,参数3控制 SE 的大小。
Morph=imopen(BW,SE); %对图像BW进行开运算,返回图像为Morph,SE是结构元素
Morph=imclose(Morph,SE);
figure,imshow(Morph),title('形态学滤波');
[B L]=bwboundaries(1-Morph);%搜索二值图像BW的外边界和内边界
figure,imshow(L),title('划分的区域');
hold on;
for i=1:length(B)
boundary=B{i};
plot(boundary(:,2),boundary(:,1),'r','LineWidth',2);
end
M=zeros(length(B));
for k=1:length(B)
N=length(B{k});
if N/2~=round(N/2)
B{k}(end+1,:)=B{k}(end,:);
N=N+1;
end
M(k)=[N*3/4];
end
S=zeros(size(Morph));
figure,imshow(S);
hold on;
for k=1:length(B)
z=B{k}(:,2)+1i*B{k}(:,1);
Z=fft(z);
[Y I]=sort(abs(Z));
for count=1:M(k)
Z(I(count))=0;
end
zz=ifft(Z);%对Z进行IDFT 运算。
plot(real(zz),imag(zz),'w');
end
七、实验要求
(1)尝试不同的阈值选择方法,实现灰度图像二值化
代码:
I=imread('plane.jpg');
%人工选定阈值进行分割,选择阈值为150
[width,height]=size(I);
T1=150;
for i=1:width
for j=1:height
if(I(i,j)运行结果:

(2)变换参数实现形态学滤波,查看滤波效果
代码:
Image1=im2double(imread('plane.jpg'));
gray=rgb2gray(Image1);
T=graythresh(gray);
BW=im2bw(gray,T);
figure,imshow(BW),title('二值化图像');
SE=strel('disk',3);
Morph=imopen(BW,SE);
Morph=imclose(Morph,SE);
figure,imshow(Morph),title('形态学滤波');运行结果:

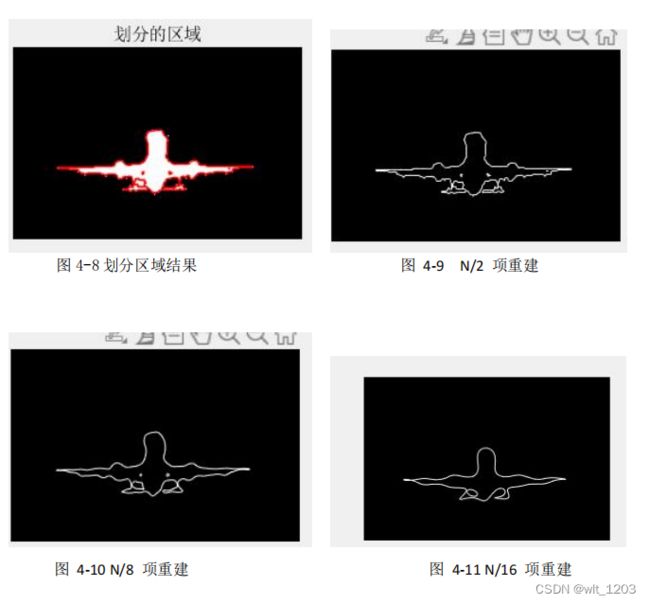
(3)更改重建边界点数,查看效果
代码:
Image1=im2double(imread('plane.jpg'));
gray=rgb2gray(Image1);
T=graythresh(gray);
BW=im2bw(gray,T);
[B L]=bwboundaries(1-BW);
figure,imshow(L),title('划分的区域');
hold on;
for i=1:length(B)
boundary=B{i};
plot(boundary(:,2),boundary(:,1),'r','LineWidth',1);
end
M=zeros(length(B),4);
for k=1:length(B)
N=length(B{k});
if N/2~=round(N/2)
B{k}(end+1,:)=B{k}(end,:);
N=N+1;
end
M(k,:)=[N/2 N*7/8 N*15/16 N*63/64];
end
S=zeros(size(Morph));
for m = 1:4
figure,imshow(S);
hold on;
for k=1:length(B)
z=B{k}(:,2)+1i*B{k}(:,1);Z=fft(z);
[Y I]=sort(abs(Z));
for count=1:M(k,m)
Z(I(count))=0;
end
zz=ifft(Z);
plot(real(zz),imag(zz),'w');
end
end
运行结果:
(4)自行设计方法实现图像分割,并计算分割区域相关参数
代码:
img=imread('plane.jpg');
subplot(2,3,1);
imshow(img);
C = makecform('srgb2lab'); %设置转换格式
img_lab = applycform(img, C);
ab = double(img_lab(:,:,2:3)); %取出lab空间的a分量和b分量
nrows = size(ab,1);
ncols = size(ab,2);
ab = reshape(ab,nrows*ncols,2);
nColors = 3; %分割的区域个数为3
[cluster_idx cluster_center] = kmeans(ab,nColors,'distance','sqEuclidean','Replicates',3); %重复聚类3次
pixel_labels = reshape(cluster_idx,nrows,ncols);
subplot(2,3,2);
imshow(pixel_labels,[]), title('聚类结果');
%显示分割后的各个区域
segmented_images = cell(1,3);
rgb_label = repmat(pixel_labels,[1 1 3]);
for k = 1:nColors
color = img;
color(rgb_label ~= k) = 0;
segmented_images{k} = color;
end
subplot(2,3,3);
imshow(segmented_images{1}), title('分割结果——区域1');
subplot(2,3,4);
imshow(segmented_images{2}), title('分割结果——区域2');
subplot(2,3,5);
imshow(segmented_images{3}), title('分割结果——区域3');运行结果:
