一万字彻底学会堆和二叉树
堆和二叉树
- 堆
-
- 一、堆的基本概念
-
- 1.1完全二叉树
- 二、大堆和小堆
- 三、堆的公式
- 四、向下调整算法
- 五、建堆
- 六、堆排序(易错)❗️❗️
- 七、堆的接口实现
-
- 7.1堆的初始化
- 7.2堆的销毁
- 7.3堆的插入
- 7.4堆的删除
- 7.5返回堆顶元素
- 7.6堆的大小
- 7.7判断是否为空
- 7.8打印堆
- 八、TopK问题❗️❗️
- 二叉树
-
- 一、四种遍历顺序
-
- 1.1前序遍历
- 1.2中序遍历
- 1.3后序遍历
- 1.4层序遍历
- 二、二叉树的接口实现
-
- 2.1前序遍历
- 2.2中序遍历
- 2.3后序遍历
- 2.4求节点个数
- 2.5求叶子节点个数
- 2.6求第K层节点❗️❗️
- 2.7寻找目标节点❗️❗️
- 2.8二叉树的销毁❗️❗️
-
- 2.8.1一级指针
- 2.8.2二级指针
- 三、深度优先广度优先遍历❗️❗️
-
- 3.1深度优先遍历
- 3.2广度优先遍历
- 3.3层序遍历的实现
- 3.4判断是否为完全二叉树
堆
一、堆的基本概念
堆(heap)是计算机科学中一类特殊的数据结构的统称。堆通常是一个可以被看做一棵树的数组对象。
两个性质:
1️⃣堆中某个结点的值总是不大于或不小于其父结点的值;
2️⃣堆总是一棵完全二叉树。
所以堆要么是大堆要么是小堆
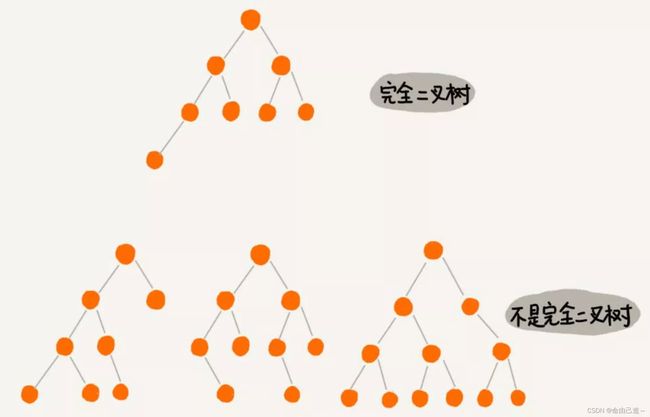
1.1完全二叉树
一棵深度为k的有n个结点的二叉树,对树中的结点按从上至下、从左到右的顺序进行编号,如果编号为i(1≤i≤n)的结点与满二叉树中编号为i的结点在二叉树中的位置相同,则这棵二叉树称为完全二叉树。
二、大堆和小堆
根据堆的两个性质可以分为大堆和小堆
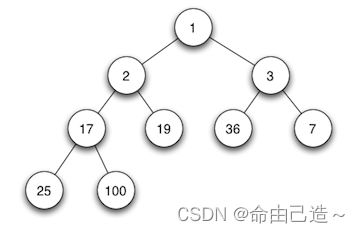
大堆(父亲大于孩子):
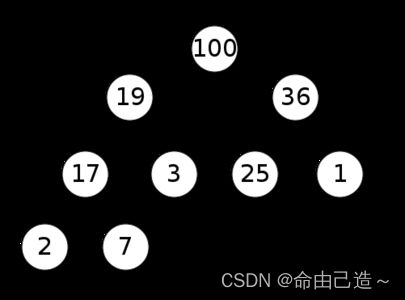
小堆(父亲小于孩子):
三、堆的公式
假设父亲的下标是parent
leftchild = 2 * parent + 1;
rightchild = leftchild + 1;
假设孩子的下标是child(不管左右)
parent = (child - 1) / 2.
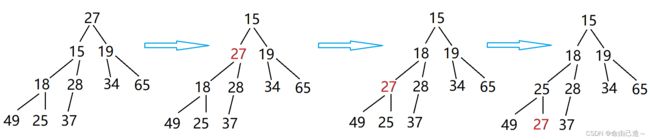
四、向下调整算法
现在我们要调小堆
前提条件:左子树和右子树都是小堆,而整棵树不是小堆
用图来演示过程:
void Swap(int* a, int* b)
{
int tmp = *a;
*a = *b;
*b = tmp;
}
//向下调整
//小堆
void AdjustDown(int a[], int n, int parent)
{
int child = 2 * parent + 1;
while (child < n)
{
if (child + 1 < n && a[child] > a[child + 1])
{
child++;
}
if (a[child] < a[parent])
{
Swap(&a[child], &a[parent]);
parent = child;
child = 2 * parent + 1;
}
else
{
break;
}
}
}
int main()
{
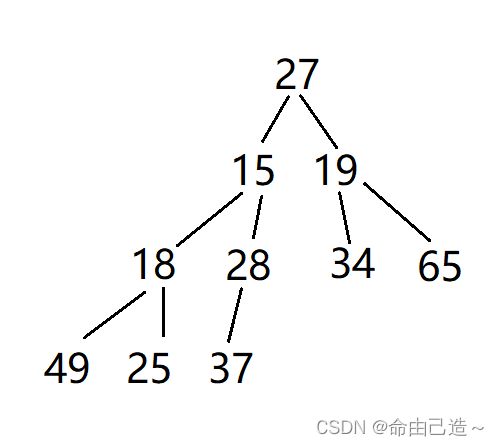
int a[] = { 27, 15, 19, 18, 28, 34, 65, 49, 25, 37 };
int sz = sizeof(a) / sizeof(a[0]);
AdjustDown(a, sz, 0);
return 0;
}
如果要建大堆,就把两个大于小于号逆置
五、建堆
上面的向下调整算法必须要满足左子树和右子树都是小堆,但是如果不满足这个条件就需要建堆
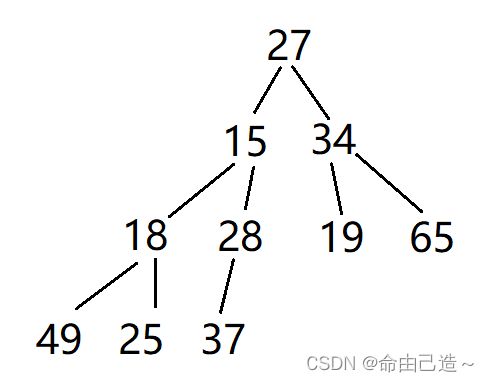
如图右子树就不满足小堆
从下向上建堆:
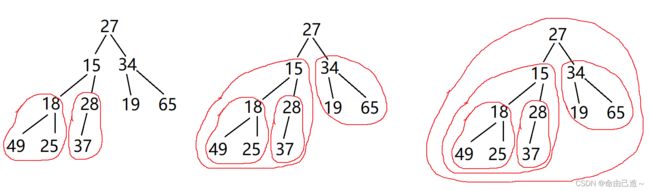
从倒数第一个非叶子节点(28),从后往前,依次向下调整。
建堆的时间复杂度为O(N)
28处节点求法(n个数字):
(n - 1 - 1)/ 2
//建堆
for (int i = (sz - 1 - 1) / 2; i >= 0; i--)
{
AdjustDown(a, sz, i);
}
六、堆排序(易错)❗️❗️
排升序建大堆,排降序建小堆
如果反过来时间复杂度就为O(N^2),而且父子关系全乱了
排降序思路:
选小的放数组后面,依次选次小的
方法:
建小堆,交换收尾元素,不把尾元素看成堆里面的,再向下调整(其他都是小堆),就能选出次小的……
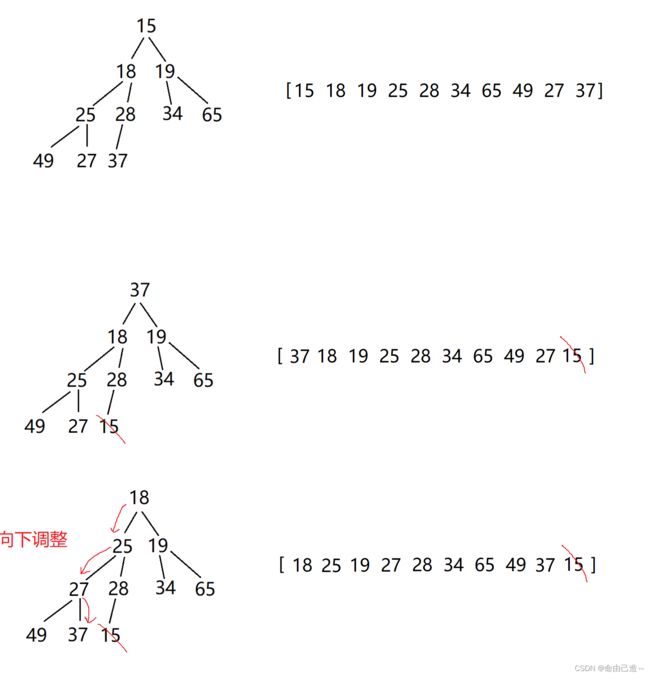
依次把数组元素向前调整,调完以后都是小堆。
这样时间复杂度为O(N * logN),(建堆 * 向下调整)
void HeapSort(int a[], int n)
{
//建小堆(降序)
for (int i = (n - 1 - 1) / 2; i >= 0; i--)
{
AdjustDown(a, n, i);
}
int end = n - 1;
while (end)
{
Swap(&a[0], a[end]);
AdjustDown(a, end, 0);
end--;
}
}
七、堆的接口实现
接口预览:
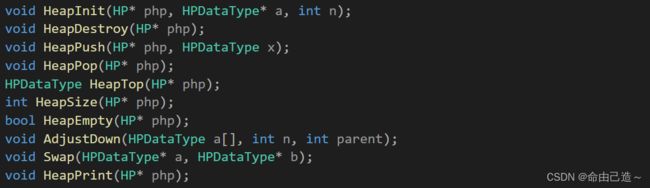
堆的结构
typedef int HPDataType;
struct Heap
{
HPDataType* a;
int size;
int capacity;
};
typedef struct Heap HP;
7.1堆的初始化
void HeapInit(HP* php, HPDataType* a, int n)
{
assert(php);
php->a = (HPDataType*)malloc(sizeof(HPDataType) * n);
if (php->a == NULL)
{
printf("malloc fail\n");
exit(-1);
}
memcpy(php->a, a, n * sizeof(HPDataType));
php->size = php->capacity = n;
//建堆
for (int i = (n - 1 - 1) / 2; i >= 0; i--)
{
AdjustDown(php->a, php->size, i);
}
}
7.2堆的销毁
void HeapDestroy(HP* php)
{
assert(php);
free(php->a);
php->a = NULL;
php->size = 0;
php->capacity = 0;
}
7.3堆的插入
插入的时候注意判断是否满
void HeapPush(HP* php, HPDataType x)
{
assert(php);
if (php->size == php->capacity)
{
HPDataType* tmp = (HPDataType*)realloc(php->a, sizeof(HPDataType) * php->capacity * 2);
if (tmp == NULL)
{
printf("realloc fail\n");
exit(-1);
}
php->a = tmp;
php->capacity *= 2;
}
php->a[php->size] = x;
php->size++;
//向上调整
AdjustUp(php->a, php->size - 1);
}
插入完后要调整为小堆(或大堆),采取向上调整算法
void AdjustUp(int* a, int child)
{
int parent = (child - 1) / 2;
while (child)
{
if (a[parent] > a[child])
{
Swap(&a[parent], &a[child]);
child = parent;
parent = (child - 1) / 2;
}
else
{
break;
}
}
}
7.4堆的删除
删除首先把首尾元素交换,删除尾,再把首元素向下调整
void HeapPop(HP* php)
{
assert(php);
assert(php->size > 0);
Swap(&php->a[0], &php->a[php->size - 1]);
php->size--;
AdjustDown(php->a, php->size, 0);
}
7.5返回堆顶元素
HPDataType HeapTop(HP* php)
{
assert(php);
assert(php->size > 0);
return php->a[0];
}
7.6堆的大小
int HeapSize(HP* php)
{
assert(php);
return php->size;
}
7.7判断是否为空
bool HeapEmpty(HP* php)
{
assert(php);
return php->size == 0;
}
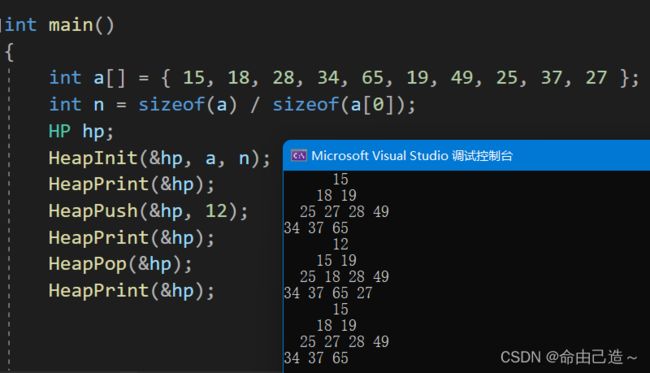
7.8打印堆
打印堆用条件控制形状
void HeapPrint(HP* php)
{
assert(php);
int row = 0;
for (row = 1; row < php->size; row++)
{
if ((int)(pow(2, row) - 1) / php->size != 0)
{
break;
}
}
int col = (int)pow(2, row - 1);
int i = 0;
int k = 0;
for (i = 0; i < row; i++)
{
int j = 0;
//打印空格
for (j = 0; j < (col / 2) - i - 1; j++)
{
printf(" ");
}
for (j = 0; j < (int)pow(2, i); j++)
{
if (k >= php->size)
{
break;
}
printf("%d ", php->a[k++]);
}
printf("\n");
}
}
效果图:
八、TopK问题❗️❗️
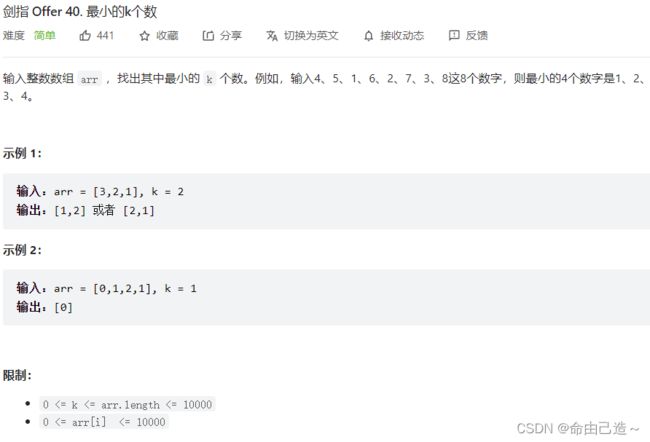
直接建堆用堆排序就可以做, 但是如果数据特别多,就会malloc非常多的节点,会出现问题。
所以我们可以只选前k个数建大堆,拿后边的所有数比较,如果堆顶元素大于后边的数,就让堆顶为这个数,再向下调整为大堆。最后的堆就是最小的k个数
/**
* Note: The returned array must be malloced, assume caller calls free().
*/
void Swap(int* a, int* b)
{
int tmp = *a;
*a = *b;
*b = tmp;
}
//大堆
void AdjustDown(int* a, int n, int parent)
{
int child = 2 * parent + 1;
while(child < n)
{
if(child + 1 < n && a[child] < a[child + 1])
{
child++;
}
if(a[parent] < a[child])
{
Swap(&a[parent], &a[child]);
parent = child;
child = 2 * parent + 1;
}
else
{
break;
}
}
}
int* getLeastNumbers(int* arr, int arrSize, int k, int* returnSize){
if(k == 0)
{
*returnSize = 0;
return NULL;
}
//取数前k个数
int* a = (int*)malloc(sizeof(int) * k);
for(int i = 0; i < k; i++)
{
a[i] = arr[i];
}
//建大堆
for(int i = (k - 1 - 1) / 2; i >= 0; i--)
{
AdjustDown(a, k, i);
}
for(int i = k; i < arrSize; i++)
{
if(a[0] > arr[i])
{
a[0] = arr[i];
AdjustDown(a, k, 0);
}
}
*returnSize = k;
return a;
}
二叉树
一、四种遍历顺序
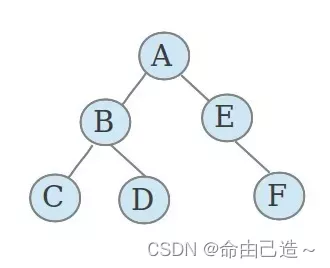
1.1前序遍历
根→左→右
A→B→C→NULL→NULL→D→NULL→NULL→E→NULL→F→NULL→NULL
1.2中序遍历
左→根→右
NULL→C→NULL→B→NULL→D→NULL→A→NULL→E→NULL→F→NULL
1.3后序遍历
左→右→根
NULL→NULL→C→NULL→NULL→D→B→NULL→NULL→NULL→F→E→A
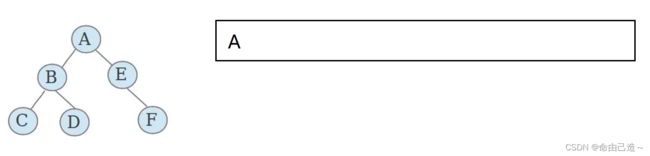
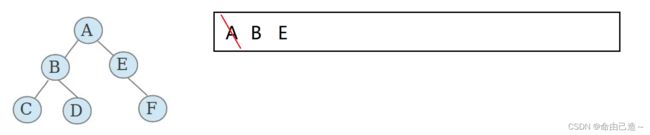
1.4层序遍历
一层一层走
A→B→E→C→D→F
二、二叉树的接口实现
2.1前序遍历
void PreOrder(BTNode* root)
{
if (root == NULL)
{
printf("NULL ");
return;
}
printf("%c ", root->val);
PreOrder(root->left);
PreOrder(root->right);
}
2.2中序遍历
void InOrder(BTNode* root)
{
if (root == NULL)
{
printf("NULL ");
return;
}
InOrder(root->left);
printf("%c ", root->val);
InOrder(root->right);
}
2.3后序遍历
void PostOrder(BTNode* root)
{
if (root == NULL)
{
printf("NULL ");
return;
}
PostOrder(root->left);
PostOrder(root->right);
printf("%c ", root->val);
}
2.4求节点个数
int TreeSize(BTNode* root)
{
if (root == NULL)
{
return 0;
}
return TreeSize(root->left) + TreeSize(root->right) + 1;
}
2.5求叶子节点个数
int TreeLeafSize(BTNode* root)
{
if (root == NULL)
{
return 0;
}
if (root->left == NULL && root->right == NULL)
{
return 1;
}
return TreeLeafSize(root->left) + TreeLeafSize(root->right);
}
2.6求第K层节点❗️❗️
求当前树的第K层的节点可以看成求(从第二层看)第K-1层的节点个数……求(从第K层看)第1层节点个数
int TreeLevelSize(BTNode* root, int k)
{
if (root == NULL)
{
return 0;
}
if (k == 1)
{
return 1;
}
return TreeLevelSize(root->left, k - 1) + TreeLevelSize(root->right, k - 1);
}
2.7寻找目标节点❗️❗️
BTNode* TreeFind(BTNode* root, BTDataType x)
{
if (root == NULL)
{
return NULL;
}
if (root->val == x)
{
return root;
}
BTNode* left = TreeFind(root->left, x);
if (left)
{
return left;
}
BTNode* right = TreeFind(root->right, x);
if (right)
{
return right;
}
return NULL;
}
2.8二叉树的销毁❗️❗️
后序遍历销毁节点:先销毁左树再销毁右树再销毁自己
2.8.1一级指针
void TreeDestroy(BTNode* root)
{
if (root == NULL)
{
return;
}
TreeDestroy(root->left);
TreeDestroy(root->right);
free(root);
}
A = NULL;
如果用一级指针就要在调用销毁函数后边把指针置空。
2.8.2二级指针
void TreeDestroy(BTNode** pproot)
{
if (*pproot == NULL)
{
return;
}
TreeDestroy(&(*pproot)->left);
TreeDestroy(&(*pproot)->right);
free(*pproot);
*pproot = NULL;
}
三、深度优先广度优先遍历❗️❗️
3.1深度优先遍历
就是从图中一个未访问的顶点开始,沿着一条路一直走到底,然后从这条路尽头的节点回退到上一个节点,再从另一条路开始走到底…,不断递归重复此过程,直到所有的顶点都遍历完成,它的特点是不撞南墙不回头,先走完一条路,再换一条路继续走。
二叉树的前中后序遍历就是深度优先遍历
3.2广度优先遍历
广度优先遍历,指的是从图的一个未遍历的节点出发,先遍历这个节点的相邻节点,再依次遍历每个相邻节点的相邻节点。
二叉树的层序遍历就是广度优先遍历
3.3层序遍历的实现
首先确定用队列实现
1.先把根入队列
2.出队头数据,带入下一层数据
先引入写好的队列:一万字彻底学会栈和队列
void TreeLevelOrder(BTNode* root)
{
Queue q;
QueueInit(&q);
if (root)
{
QueuePush(&q, root);
}
while (!QueueEmpty(&q))
{
BTNode* front = QueueFront(&q);
QueuePop(&q);
printf("%c ", front->data);
if (front->left)
{
QueuePush(&q, front->left);
}
if (front->right)
{
QueuePush(&q, front->right);
}
}
QueueDestroy(&q);
}
3.4判断是否为完全二叉树
用两个二叉树来总结规律:
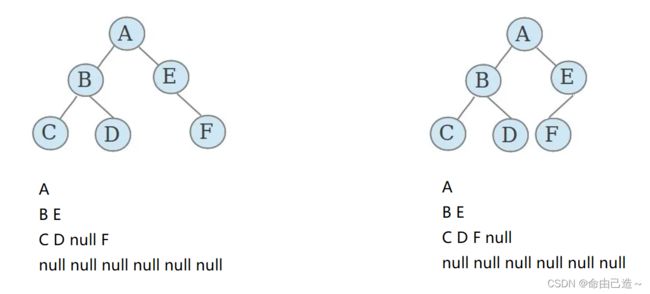
可以看出完全二叉树层序遍历只要出现NULL,后边的都为NULL;
不是完全二叉树的NULL后边会有不为NULL的节点
bool BinaryTreeComplete(BTNode* root)
{
Queue q;
QueueInit(&q);
if (root)
{
QueuePush(&q, root);
}
while (!QueueEmpty(&q))
{
BTNode* front = QueueFront(&q);
QueuePop(&q);
if (front == NULL)
{
break;
}
else
{
QueuePush(&q, front->left);
QueuePush(&q, front->right);
}
}
while (!QueueEmpty(&q))
{
BTNode* cur = QueueFront(&q);
QueuePop(&q);
if (cur)
{
QueueDestroy(&q);
return false;
}
}
QueueDestroy(&q);
return true;
}