【自动驾驶】基于采样的路径规划算法——PRM(含python实现)
文章目录
- 参考资料
- 1. 基本概念
-
- 1.1 基于随机采样的路径规划算法
- 1.2 概率路图算法(Probabilistic Road Map, PRM)
- 1.3 PRM算法的优缺点
- 1.4 PRM算法伪代码
- 2. python代码实现
参考资料
- 路径规划 | 随机采样算法
- 路径规划: PRM 路径规划算法
- Probabilistic Roadmaps (PRM)
- Probabilistic roadmap
1. 基本概念
1.1 基于随机采样的路径规划算法
-
基于随机采样的路径规划算法适用于高维度空间,它们以概率完备性(当时间接近无限时一定有解)来代替完备性,从而提高搜索效率。
-
基于随机采样的路径规划算法又分为单查询算法(single-query path planning)以及渐近最优算法(asymptotically optimal path planning),前者只要找到可行路径即可,侧重快速性,后者还会对找到的路径进行逐步优化,慢慢达到最优,侧重最优性。单查询方法包括概率路图算法(Probabilistic Road Map, PRM)、快速随机扩展树算法(Rapidly-exploring Random Tree, RRT)、RRT-Connect算法等,渐近最优算法有RRT*算法等。
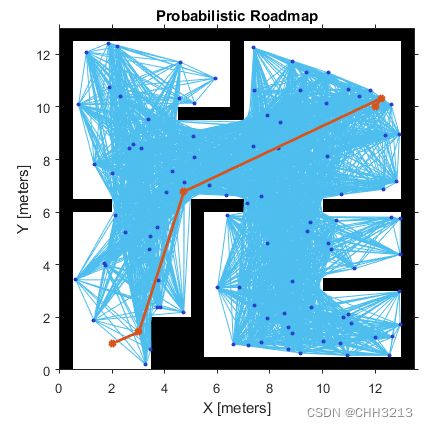
1.2 概率路图算法(Probabilistic Road Map, PRM)
概率路图算法是一种典型的基于采样的路径规划方法。它主要分为两个阶段:学习阶段, 查询阶段。

学习阶段
应用PRM算法进行路径规划时,首先在将连续空间转换成离散空间后,在离散空间中采样一个无碰撞的点(随机撒点,剔除落在障碍物上的点),以该点为中心,在一定的半径范围内搜索其邻域点,并将其连接形成路径,随后进行碰撞检测,若无碰撞,则保留该路径。

查询阶段
当空间中所有采样点均完成上述步骤后,再应用图搜索算法搜索出可行路径。
1.3 PRM算法的优缺点
优点
该算法原理简单,容易实现,只需要调整参数即可实现不同场景的路径规划,且不需要对环境中的障碍物进行精确建模,在高维空间和动态环境中的路径规划有很大优势。
缺点
但该算法存在狭窄通路问题: 空白区域采样点密集,障碍物密集处采样点又相对较少,可能无法得到最短路径。而且参数的设置对路径规划的结果影响较大,采样点的数量、邻域的大小设置不合理均可能导致路径规划失败(如采样点设置过少导致生成的路径过少未覆盖起终点、邻域设置过大导致过多的路径无法通过碰撞检测)。
所以PRM是概率完备且不最优的算法。
1.4 PRM算法伪代码
概率路图的构建过程的伪代码如下:
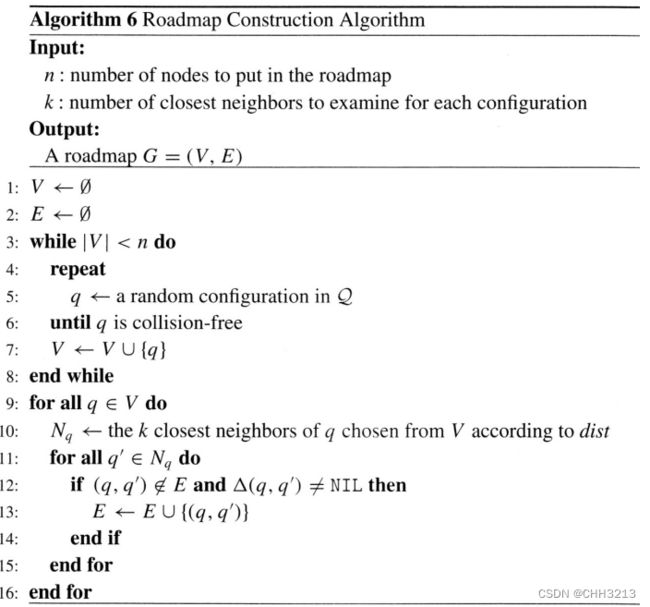
如上图所示,
-
步骤 1、2 : 初始化两个集合,其中 V V V表示随机点集, E E E表示路径集。
-
步骤 3~8 : 每次随机采样一个无碰撞的点,将这个无碰撞的点加入 V V V中,重复 n n n次。
-
步骤 9~16:生成概率路图。
- 步骤 10:对 V V V中的每个点 q q q,根据一定的距离范围选择 k k k个邻域点
- 步骤 11~15:对每个领域点 q ′ q' q′进行判断,如果 q q q和 q ′ q' q′尚未形成路径,则将其连接形成路径,随后进行碰撞检测,若无碰撞,则保留该路径。
在依据上述步骤构建完路图后,使用图搜索算法(如Dijkstra算法)在路图中搜索出一条从起点到终点的最短路径即可。
2. python代码实现
代码主体来自pythonRobotics,这里只进行了相应的注释。另外欢迎访问我的github仓库~~
import math
import numpy as np
import matplotlib.pyplot as plt
from scipy.spatial import KDTree
from celluloid import Camera # 保存动图时用,pip install celluloid
# parameter
N_SAMPLE = 500 # 采样点数目,即随机点集V的大小
N_KNN = 10 # 一个采样点的领域点个数
MAX_EDGE_LEN = 30.0 # [m] Maximum edge length
show_animation = True
"""
kd-tree用于快速查找nearest-neighbor
query(self, x[, k, eps, p, distance_upper_bound]): 查询kd-tree附近的邻居
"""
class Node:
"""
Node class for dijkstra search
"""
def __init__(self, x, y, cost, parent_index):
self.x = x
self.y = y
self.cost = cost # 每条边权值
self.parent_index = parent_index
def __str__(self):
return str(self.x) + "," + str(self.y) + "," +\
str(self.cost) + "," + str(self.parent_index)
def prm_planning(start_x, start_y, goal_x, goal_y, obstacle_x_list, obstacle_y_list, robot_radius, *, camara=None,rng=None):
"""
Run probabilistic road map planning
:param start_x: start x position
:param start_y: start y position
:param goal_x: goal x position
:param goal_y: goal y position
:param obstacle_x_list: obstacle x positions
:param obstacle_y_list: obstacle y positions
:param robot_radius: robot radius
:param rng: 随机数构造器
:return:
"""
obstacle_kd_tree = KDTree(np.vstack((obstacle_x_list, obstacle_y_list)).T)
# 采样点集生成
sample_x, sample_y = sample_points(start_x, start_y, goal_x, goal_y,
robot_radius,
obstacle_x_list, obstacle_y_list,
obstacle_kd_tree, rng)
if show_animation:
plt.plot(sample_x, sample_y, ".b")
# 生成概率路图
road_map = generate_road_map(sample_x, sample_y, robot_radius, obstacle_kd_tree)
# 使用迪杰斯特拉规划路径
rx, ry = dijkstra_planning(
start_x, start_y, goal_x, goal_y, road_map, sample_x, sample_y,camara)
return rx, ry
def is_collision(sx, sy, gx, gy, rr, obstacle_kd_tree):
"""判断是否发生碰撞,true碰撞,false不碰
rr: 机器人半径
"""
x = sx
y = sy
dx = gx - sx
dy = gy - sy
yaw = math.atan2(gy - sy, gx - sx)
d = math.hypot(dx, dy)
if d >= MAX_EDGE_LEN:
return True
D = rr
n_step = round(d / D)
for i in range(n_step):
dist, _ = obstacle_kd_tree.query([x, y]) # 查询kd-tree附近的邻居
if dist <= rr:
return True # collision
x += D * math.cos(yaw)
y += D * math.sin(yaw)
# goal point check
dist, _ = obstacle_kd_tree.query([gx, gy])
if dist <= rr:
return True # collision
return False # OK
def generate_road_map(sample_x, sample_y, rr, obstacle_kd_tree):
"""
概率路图生成
sample_x: [m] x positions of sampled points
sample_y: [m] y positions of sampled points
robot_radius: Robot Radius[m]
obstacle_kd_tree: KDTree object of obstacles
"""
road_map = []
n_sample = len(sample_x)
sample_kd_tree = KDTree(np.vstack((sample_x, sample_y)).T)
for (i, ix, iy) in zip(range(n_sample), sample_x, sample_y):
# 对V中的每个点q,选择k个邻域点
dists, indexes = sample_kd_tree.query([ix, iy], k=n_sample)
edge_id = []
for ii in range(1, len(indexes)):
nx = sample_x[indexes[ii]]
ny = sample_y[indexes[ii]]
# 对每个领域点$q'$进行判断,如果$q$和$q'$尚未形成路径,则将其连接形成路径并进行碰撞检测,若无碰撞,则保留该路径。
if not is_collision(ix, iy, nx, ny, rr, obstacle_kd_tree):
edge_id.append(indexes[ii])
if len(edge_id) >= N_KNN:
break
road_map.append(edge_id)
# plot_road_map(road_map, sample_x, sample_y)
return road_map
def dijkstra_planning(sx, sy, gx, gy, road_map, sample_x, sample_y,camara):
"""
s_x: start x position [m]
s_y: start y position [m]
goal_x: goal x position [m]
goal_y: goal y position [m]
obstacle_x_list: x position list of Obstacles [m]
obstacle_y_list: y position list of Obstacles [m]
robot_radius: robot radius [m]
road_map: 构建好的路图 [m]
sample_x: 采样点集x [m]
sample_y: 采样点集y [m]
@return: Two lists of path coordinates ([x1, x2, ...], [y1, y2, ...]), empty list when no path was found
"""
start_node = Node(sx, sy, 0.0, -1)
goal_node = Node(gx, gy, 0.0, -1)
# 使用字典的方式构造开闭集合
# openList表由待考察的节点组成, closeList表由已经考察过的节点组成。
open_set, closed_set = dict(), dict()
open_set[len(road_map) - 2] = start_node
path_found = True
# 步骤与A星算法一致
while True:
# 如果open_set是空的
if not open_set:
print("Cannot find path")
path_found = False
break
c_id = min(open_set, key=lambda o: open_set[o].cost)
current = open_set[c_id]
# show graph
if show_animation and len(closed_set.keys()) % 2 == 0:
# for stopping simulation with the esc key.
plt.gcf().canvas.mpl_connect(
'key_release_event',
lambda event: [exit(0) if event.key == 'escape' else None])
plt.plot(current.x, current.y, "xg")
plt.pause(0.001)
if camara !=None:
camara.snap()
if c_id == (len(road_map) - 1):
print("goal is found!")
goal_node.parent_index = current.parent_index
goal_node.cost = current.cost
break
# Remove the item from the open set
del open_set[c_id]
# Add it to the closed set
closed_set[c_id] = current
# expand search grid based on motion model
for i in range(len(road_map[c_id])):
n_id = road_map[c_id][i]
dx = sample_x[n_id] - current.x
dy = sample_y[n_id] - current.y
d = math.hypot(dx, dy)
node = Node(sample_x[n_id], sample_y[n_id],
current.cost + d, c_id)
if n_id in closed_set:
continue
# Otherwise if it is already in the open set
if n_id in open_set:
if open_set[n_id].cost > node.cost:
open_set[n_id].cost = node.cost
open_set[n_id].parent_index = c_id
else:
open_set[n_id] = node
if path_found is False:
return [], []
# generate final course
rx, ry = [goal_node.x], [goal_node.y]
parent_index = goal_node.parent_index
while parent_index != -1:
n = closed_set[parent_index]
rx.append(n.x)
ry.append(n.y)
parent_index = n.parent_index
return rx, ry
def sample_points(sx, sy, gx, gy, rr, ox, oy, obstacle_kd_tree, rng):
"""采样点集生成
"""
max_x = max(ox)
max_y = max(oy)
min_x = min(ox)
min_y = min(oy)
sample_x, sample_y = [], []
if rng is None:
rng = np.random.default_rng()
while len(sample_x) <= N_SAMPLE:
tx = (rng.random() * (max_x - min_x)) + min_x
ty = (rng.random() * (max_y - min_y)) + min_y
# 在障碍物中查询离[tx, ty]最近的点的距离
dist, index = obstacle_kd_tree.query([tx, ty])
# 距离大于机器人半径,说明没有碰撞,将这个无碰撞的点加入V中,重复n次。
if dist >= rr:
sample_x.append(tx)
sample_y.append(ty)
# 别忘了起点和目标点
sample_x.append(sx)
sample_y.append(sy)
sample_x.append(gx)
sample_y.append(gy)
return sample_x, sample_y
def plot_road_map(road_map, sample_x, sample_y): # pragma: no cover
for i, _ in enumerate(road_map):
for ii in range(len(road_map[i])):
ind = road_map[i][ii]
plt.plot([sample_x[i], sample_x[ind]],
[sample_y[i], sample_y[ind]], "-k")
def main(rng=None):
print( " start!!")
fig = plt.figure(1)
# camara = Camera(fig) # 保存动图时使用
camara = None
# start and goal position
sx = 10.0 # [m]
sy = 10.0 # [m]
gx = 50.0 # [m]
gy = 50.0 # [m]
robot_size = 5.0 # [m]
ox = []
oy = []
for i in range(60):
ox.append(i)
oy.append(0.0)
for i in range(60):
ox.append(60.0)
oy.append(i)
for i in range(61):
ox.append(i)
oy.append(60.0)
for i in range(61):
ox.append(0.0)
oy.append(i)
for i in range(40):
ox.append(20.0)
oy.append(i)
for i in range(40):
ox.append(40.0)
oy.append(60.0 - i)
if show_animation:
plt.plot(ox, oy, ".k")
plt.plot(sx, sy, "^r")
plt.plot(gx, gy, "^c")
plt.grid(True)
plt.axis("equal")
if camara != None:
camara.snap()
rx, ry = prm_planning(sx, sy, gx, gy, ox, oy, robot_size,camara=camara, rng=rng)
assert rx, 'Cannot found path'
if show_animation:
plt.plot(rx, ry, "-r")
plt.pause(0.001)
if camara!=None:
camara.snap()
animation = camara.animate()
animation.save('trajectory.gif')
plt.savefig("result.png")
plt.show()
if __name__ == '__main__':
main()
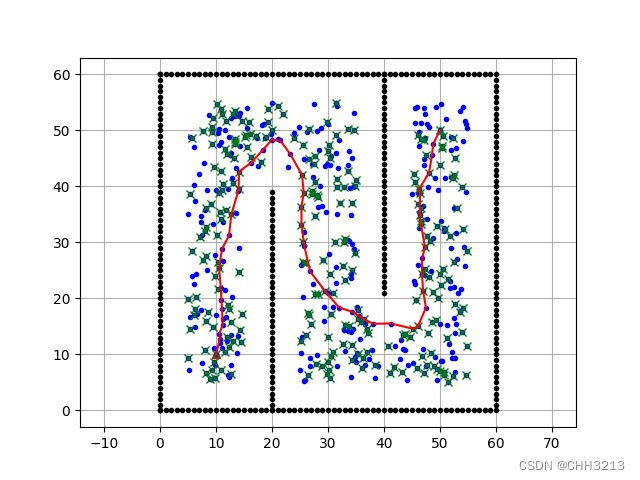
实现效果如下: