Batch Normalization深入理解
Batch Normalization深入理解
1. BN的提出背景是什么?
统计学习中的一个很重要的假设就是输入的分布是相对稳定的。如果这个假设不满足,则模型的收敛会很慢,甚至无法收敛。所以,对于一般的统计学习问题,在训练前将数据进行归一化或者白化(whitening)是一个很常用的trick。
但这个问题在深度神经网络中变得更加难以解决。在神经网络中,网络是分层的,可以把每一层视为一个单独的分类器,将一个网络看成分类器的串联。这就意味着,在训练过程中,随着某一层分类器的参数的改变,其输出的分布也会改变,这就导致下一层的输入的分布不稳定。分类器需要不断适应新的分布,这就使得模型难以收敛。
对数据的预处理可以解决第一层的输入分布问题,而对于隐藏层的问题无能为力,这个问题就是Internal Covariate Shift。而Batch Normalization其实主要就是在解决这个问题。
除此之外,一般的神经网络的梯度大小往往会与参数的大小相关(仿射变换),且随着训练的过程,会产生较大的波动,这就导致学习率不宜设置的太大。Batch Normalization使得梯度大小相对固定,一定程度上允许我们使用更高的学习率。
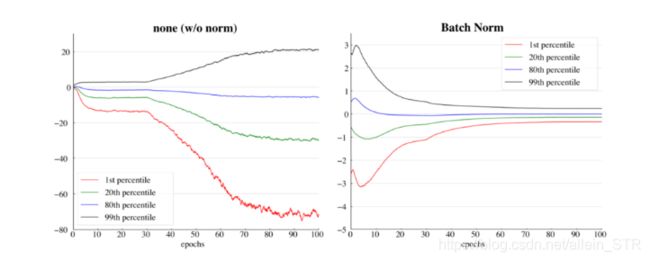
(左)没有任何归一化,(右)应用了batch normalization
2. BN工作原理是什么?
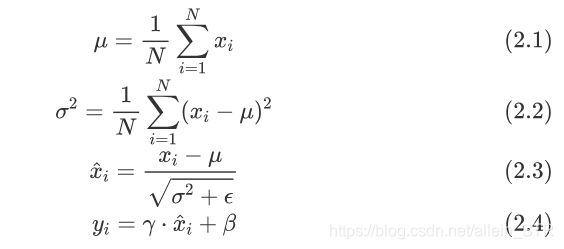
假定我们的输入是一个大小为 N 的mini-batch ,通过下面的四个式子计算得到的y 就是Batch Normalization(BN)的值
数据看起来像高斯分布。
首先,由(2.1)和(2.2)得到mini-batch的均值和方差,之后进行(2.3)的归一化操作,在分母加上一个小的常数是为了避免出现除0操作.整个过程中,只有最后的(2.4)引入了额外参数γ和β,他们的size都为特征长度,与 xi 相同。
BN层通常添加在隐藏层的激活函数之前,线性变换之后。如果我们把(2.4)和之后的激活函数放在一起看,可以将他们视为一层完整的神经网络(线性+激活)。(注意BN的线性变换和一般隐藏层的线性变换仍有区别,前者是element-wise的,后者是矩阵乘法。)
此时, ![]() 可以视为这一层网络的输入,而
可以视为这一层网络的输入,而![]() 是拥有固定均值和方差的。这就解决了Covariate Shift.
是拥有固定均值和方差的。这就解决了Covariate Shift.
另外, y还具有保证数据表达能力的作用。 ![]() 在normalization的过程中,不可避免的会改变自身的分布,而这会导致学习到的特征的表达能力有一定程度的丢失。通过引入参数γ和β,极端情况下,网络可以将γ和β训练为原分布的标准差和均值来恢复数据的原始分布。这样保证了引入BN,不会使效果更差。
在normalization的过程中,不可避免的会改变自身的分布,而这会导致学习到的特征的表达能力有一定程度的丢失。通过引入参数γ和β,极端情况下,网络可以将γ和β训练为原分布的标准差和均值来恢复数据的原始分布。这样保证了引入BN,不会使效果更差。
3. BN实现方法是什么?
我们将Batch Normalization分成正向(只包括训练)和反向两个过程。
正向过程的参数x是一个mini-batch的数据,gamma和beta是BN层的参数,bn_param是一个字典,包括 ![]() 的取值和用于inference的
的取值和用于inference的 ![]() 和
和![]() 的移动平均值,最后返回BN层的输出y,会在反向过程中用到的中间变量cache,以及更新后的移动平均。
的移动平均值,最后返回BN层的输出y,会在反向过程中用到的中间变量cache,以及更新后的移动平均。
反向过程的参数是来自上一层的误差信号dout,以及正向过程中存储的中间变量cache,最后返回 ![]() 的偏导数。
的偏导数。
实现与推导的不同在于,实现是对整个batch的操作。
import numpy as np
def batchnorm_forward(x, gamma, beta, bn_param):
# read some useful parameter
N, D = x.shape
eps = bn_param.get('eps', 1e-5)
momentum = bn_param.get('momentum', 0.9)
running_mean = bn_param.get('running_mean', np.zeros(D, dtype=x.dtype))
running_var = bn_param.get('running_var', np.zeros(D, dtype=x.dtype))
# BN forward pass
sample_mean = x.mean(axis=0)
sample_var = x.var(axis=0)
x_ = (x - sample_mean) / np.sqrt(sample_var + eps)
out = gamma * x_ + beta
# update moving average
running_mean = momentum * running_mean + (1-momentum) * sample_mean
running_var = momentum * running_var + (1-momentum) * sample_var
bn_param['running_mean'] = running_mean
bn_param['running_var'] = running_var
# storage variables for backward pass
cache = (x_, gamma, x - sample_mean, sample_var + eps)
return out, cache
def batchnorm_backward(dout, cache):
# extract variables
N, D = dout.shape
x_, gamma, x_minus_mean, var_plus_eps = cache
# calculate gradients
dgamma = np.sum(x_ * dout, axis=0)
dbeta = np.sum(dout, axis=0)
dx_ = np.matmul(np.ones((N,1)), gamma.reshape((1, -1))) * dout
dx = N * dx_ - np.sum(dx_, axis=0) - x_ * np.sum(dx_ * x_, axis=0)
dx *= (1.0/N) / np.sqrt(var_plus_eps)
return dx, dgamma, dbeta4. BN优点是什么?
-
更快的收敛。
-
降低初始权重的重要性。
-
鲁棒的超参数。
-
需要较少的数据进行泛化。
5. BN缺点是什么?
- 在使用小batch size的时候不稳定: batch normalization必须计算平均值和方差,以便在batch中对之前的输出进行归一化。如果batch大小比较大的话,这种统计估计是比较准确的,而随着batch大小的减少,估计的准确性持续减小。

以上是ResNet-50的验证错误图。可以推断,如果batch大小保持为32,它的最终验证误差在23左右,并且随着batch大小的减小,误差会继续减小(batch大小不能为1,因为它本身就是平均值)。损失有很大的不同(大约10%)。
如果batch大小是一个问题,为什么我们不使用更大的batch?我们不能在每种情况下都使用更大的batch。在finetune的时候,我们不能使用大的batch,以免过高的梯度对模型造成伤害。在分布式训练的时候,大的batch最终将作为一组小batch分布在各个实例中。
-
导致训练时间的增加:NVIDIA和卡耐基梅隆大学进行的实验结果表明,“尽管Batch Normalization不是计算密集型,而且收敛所需的总迭代次数也减少了。”但是每个迭代的时间显著增加了,而且还随着batch大小的增加而进一步增加。

batch normalization消耗了总训练时间的1/4。原因是batch normalization需要通过输入数据进行两次迭代,一次用于计算batch统计信息,另一次用于归一化输出。
-
训练和推理时不一样的结果:例如,在真实世界中做“物体检测”。在训练一个物体检测器时,我们通常使用大batch(YOLOv4和Faster-RCNN都是在默认batch大小= 64的情况下训练的)。但在投入生产后,这些模型的工作并不像训练时那么好。这是因为它们接受的是大batch的训练,而在实时情况下,它们的batch大小等于1,因为它必须一帧帧处理。考虑到这个限制,一些实现倾向于基于训练集上使用预先计算的平均值和方差。另一种可能是基于你的测试集分布计算平均值和方差值。
-
对于在线学习不好:在线学习是一种学习技术,在这种技术中,系统通过依次向其提供数据实例来逐步接受训练,可以是单独的,也可以是通过称为mini-batch的小组进行。每个学习步骤都是快速和便宜的,所以系统可以在新的数据到达时实时学习。
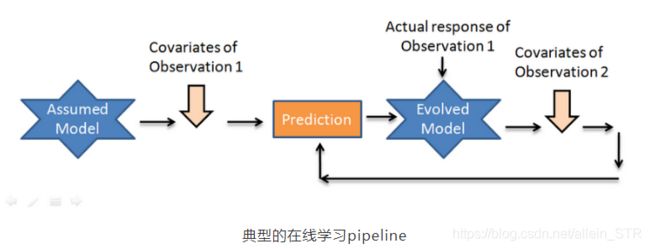
由于它依赖于外部数据源,数据可能单独或批量到达。由于每次迭代中batch大小的变化,对输入数据的尺度和偏移的泛化能力不好,最终影响了性能。
-
对于循环神经网络不好:
虽然batch normalization可以显著提高卷积神经网络的训练和泛化速度,但它们很难应用于递归结构。batch normalization可以应用于RNN堆栈之间,其中归一化是“垂直”应用的,即每个RNN的输出。但是它不能“水平地”应用,例如在时间步之间,因为它会因为重复的重新缩放而产生爆炸性的梯度而伤害到训练。
[^注]: 一些研究实验表明,batch normalization使得神经网络容易出现对抗漏洞,但我们没有放入这一点,因为缺乏研究和证据。
6. 可替换的方法:
在batch normalization无法很好工作的情况下,有几种替代方法。
-
Layer Normalization
-
Instance Normalization
-
Group Normalization (+ weight standardization)
-
Synchronous Batch Normalization
7.参考资料
-
Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift
-
Deriving the Gradient for the Backward Pass of Batch Normalization
-
CS231n Convolutional Neural Networks for Visual Recognition
-
https://towardsdatascience.com/curse-of-batch-normalization-8e6dd20bc304