在Jetson Nano上学习ROS的记录(版本Ubuntu18.04,课程来源赵虚左老师的《ROS理论与实践》)第十章-第一节 TF坐标变换(内含PyKDL 和PyInit__tf2功能缺失等解决)
系列文章目录
第一章 ROS空间创建、helloworld的实现、开启多个节点
第二章 话题通信
第三章 服务通信
第四章 参数服务器
第五章 常用指令
第六章 通信机制实操
第七章 ROS通信机制进阶(常用API、Python模块的导入)
第八章 元功能包、节点运行管理launch文件(teleop_twist安装方法)
第九章 重名问题、分布式通信
第十章-第一节 TF坐标变换(内含PyKDL 和PyInit__tf2功能缺失等解决)
文章目录
- 系列文章目录
- 前言
- 一、ROS常用组件
- 二、TF坐标变换
-
- 1. 坐标msg消息
- 2.静态坐标变换
- 3.动态坐标变换
- 4.多坐标变换
- 5.坐标系关系查看
- 总结
前言
现在大二,之前大一有幸参加了2021的国赛,很壮烈的拿了个江苏赛区的二等奖。但发现无人机这个题,真的是往堆钱上走了。不上ROS不行,现在来记录一下一个纯小白学习ROS的过程和遇到的问题。防止学弟、学妹们再走我走过的弯路。板子用的是学长给的Jetson Nano(4GB),版本是Ubuntu18.04(已配置好基础ROS所需配置)
一、ROS常用组件
在ROS中内置一些比较实用的工具,通过这些工具可以方便快捷的实现某个功能或调试程序,从而提高开发效率,本章主要介绍ROS中内置的如下组件:
- TF坐标变换,实现不同类型的坐标系之间的转换;
- rosbag 用于录制ROS节点的执行过程并可以重放该过程;
- rqt 工具箱,集成了多款图形化的调试工具。
二、TF坐标变换
当然,根据我们高中学习的知识,在明确了不同坐标系之间的的相对关系,就可以实现任何坐标点在不同坐标系之间的转换,但是该计算实现是较为常用的,且算法也有点复杂,因此在 ROS 中直接封装了相关的模块: 坐标变换(TF)。
- tf:TransForm Frame,坐标变换
- 坐标系:ROS 中是通过坐标系统开标定物体的,确切的将是通过右手坐标系来标定的。 作用在 ROS 中用于实现不同坐标系之间的点或向量的转换。
1. 坐标msg消息
订阅发布模型中数据载体 msg 是一个重要实现,首先需要了解一下,在坐标转换实现中常用的 msg:geometry_msgs/TransformStamped和geometry_msgs/PointStamped
前者用于传输坐标系相关位置信息,后者用于传输某个坐标系内坐标点的信息。在坐标变换中,频繁的需要使用到坐标系的相对关系以及坐标点信息。
- 命令行键入:
rosmsg info geometry_msgs/PointStamped
输出
std_msgs/Header header #头信息
uint32 seq #序列号
time stamp #时间戳
string frame_id #我的坐标点是以哪个参考系为参考物的 所属坐标系的 id
geometry_msgs/Point point #坐标点的坐标值
float64 x
float64 y
float64 z
- 命令行键入:
rosmsg info geometry_msgs/PointStamped
此命令是描述两个坐标系相关位置信息
输出
std_msgs/Header header
uint32 seq
time stamp
string frame_id #参考系坐标id
string child_frame_id #子坐标系的 id B相对于A坐标系的关系。即B是child
geometry_msgs/Transform transform #坐标信息
geometry_msgs/Vector3 translation #偏移量
float64 x #X 方向的偏移量
float64 y #y 方向的偏移量
float64 z #z 方向的偏移量
geometry_msgs/Quaternion rotation #四元数 欧拉角的另一种表现形式
float64 x
float64 y
float64 z
float64 w
2.静态坐标变换
所谓静态坐标变换,是指两个坐标系之间的相对位置是固定的。
需求描述:
现有一机器人模型,核心构成包含主体与雷达,各对应一坐标系,坐标系的原点分别位于主体与雷达的物理中心,已知雷达原点相对于主体原点位移关系如下: x 0.2 y0.0 z0.5。当前雷达检测到一障碍物,在雷达坐标系中障碍物的坐标为 (2.0 3.0 5.0),请问,该障碍物相对于主体的坐标是多少?
实现分析:
坐标系相对关系,可以通过发布方发布
订阅方,订阅到发布的坐标系相对关系,再传入坐标点信息(可以写死),然后借助于 tf 实现坐标变换,并将结果输出
实现流程:
- 新建功能包,添加依赖
- 编写发布方实现
- 编写订阅方实现
- 执行并查看结果
- 创建功能包
依赖: tf2、tf2_ros、tf2_geometry_msgs、roscpp rospy std_msgs geometry_msgs
给予权限
修改cmakelists - 发布方
代码如下:
#! /usr/bin/env python2.7
#encoding:utf-8
from platform import python_version
print(python_version())
import rospy
import tf2_ros
from geometry_msgs.msg import TransformStamped
from tf.transformations import quaternion_from_euler
"""
发布方实现:发布两个坐标系的相对关系(车辆底盘———base_link和雷达——laser)
流程:
1.导包
2.初始化ros节点
3.创建发布对象
4.组织被发布的数据
5.发布数据
6.spin()回旋函数 不使用的话,发布后就结束了
"""
if __name__ == "__main__":
# 2.初始化ros节点
rospy.init_node("static_pub_p")
# 3.创建发布对象
pub = tf2_ros.StaticTransformBroadcaster()
# 4.组织被发布的数据 描述两个坐标系相关位置信息rosmsg info geometry_msgs/TransformStamped
ts = TransformStamped()
# header
ts.header.stamp = rospy.Time.now () #时间戳
ts.header.frame_id = "base_link"#参考系坐标id,即小车底盘id
#child frame
ts.child_frame_id = "laser"
#相对关系(偏移与四元数)
ts.transform.translation.x = 2.0
ts.transform.translation.y = 0.0
ts.transform.translation.z = 0.5
#先从欧拉角转换成四元数
qtn = quaternion_from_euler(0,0,0)#雷达相对于小车的欧拉角
#再设置四元数
ts.transform.rotation.x = qtn[0]
ts.transform.rotation.y = qtn[1]
ts.transform.rotation.z = qtn[2]
ts.transform.rotation.w = qtn[3]
# 5.发布数据
pub.sendTransform(ts)
# 6.spin()#回旋函数 不使用的话,发布后就结束了
rospy.spin()
这里很有可能出现问题
1:ImportError: dynamic module does not define module export function (PyInit__tf2)

2:ModuleNotFoundError: No module named ‘defusedxml
3:no modle named PyKDL 等问题
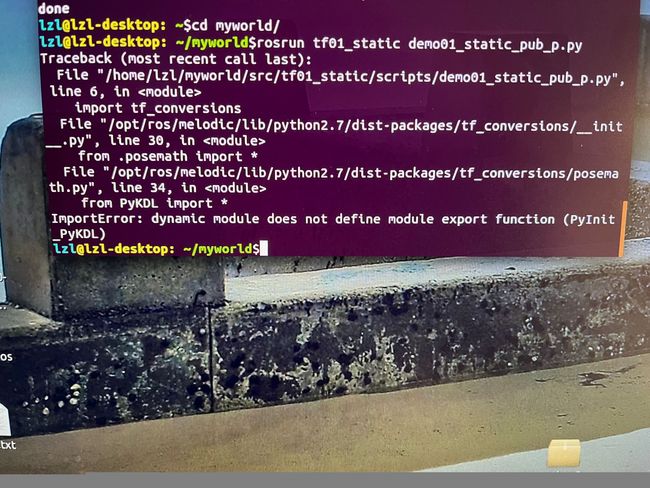
其实这里是python2与3环境混乱的原因
在ros官网上有给回答:

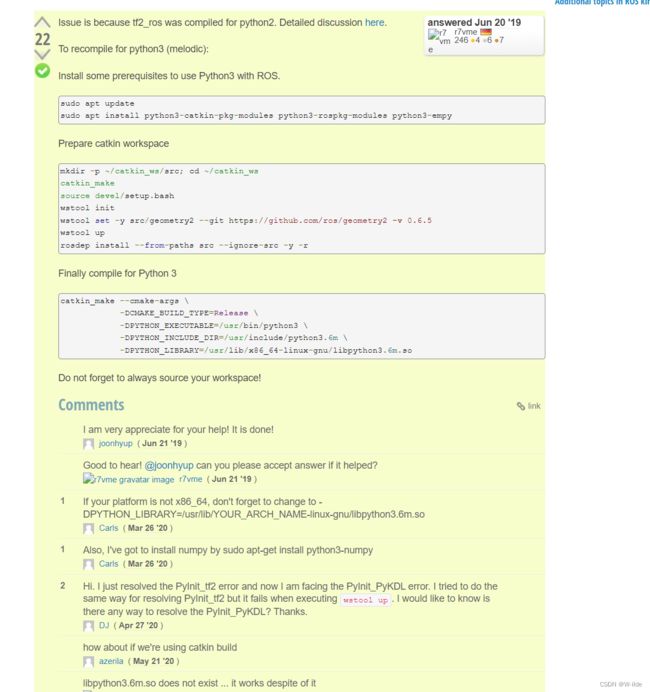
GitHub上也给了解答,上面的解决方式是重建python,利用虚拟环境

另外也可以使用博主的方法,设置python3的软链接。
以上均为我试过,然后失败的方法。我使用的硬件是Jetson Nano,版本为Ubuntu18.04。经过尝试,也有一部分凑巧的原因,我发现导入tf_conversions是我问题的源头,于是我直接导入from tf.transformations import quaternion_from_euler并将编译环境指定成python2.7:#! /usr/bin/env python2.7
成功了,且roslaunch turtle_tf2 turtle_tf2_demo.launch亦正常运行。
- 打开一个命令行:
roscore
再开一个命令行
cd 工作空间
source ./devel/setup.bash
rosrun tf01_static demo01_static_pub_p.py
检验方式:
第一种方式:
再开一个命令行:rostopic list
输出:
/rosout
/rosout_agg
/tf_static
rostopic echo /tf_static
输出:
transforms:
1.
header:
seq: 0
stamp:
secs: 1656506787
nsecs: 767760992
frame_id: "base_link"
child_frame_id: "laser"
transform:
translation:
x: 2.0
y: 0.0
z: 0.5
rotation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
---
第二种方式:
打开一个命令行:rviz
选择base——link
add TF
- 订阅方
代码如下:
#! /usr/bin/env python2.7
#encoding:utf-8
import rospy
import tf2_ros
import tf2_geometry_msgs
"""
订阅方:订阅坐标变换消息,传输被转换的坐标点,调用转换算法
流程:
1.导包
2.初始化
3.创建订阅对象
4.组织被转换的坐标点
5.转换逻辑实现,调用tf封装的算法
6.输出结果
7.spin()
"""
if __name__ == "__main__":
# 2.初始化
rospy.init_node("static_sub_p")
# 3.创建订阅对象
#3-1创建缓存对象
buffer = tf2_ros.Buffer()
#3-2创建订阅对象(将缓存存入)
sub = tf2_ros.TransformListener(buffer)
# 4.组织被转换的坐标点 不要使用 geometry_msgs,需要使用 tf2 内置的消息类型
ps = tf2_geometry_msgs.PointStamped()
ps.header.stamp = rospy.Time.now()
ps.header.frame_id = "laser" #坐标系是雷达坐标系
ps.point.x = 2.0
ps.point.y = 3.0
ps.point.z = 5.0 #障碍物在雷达坐标系下的坐标
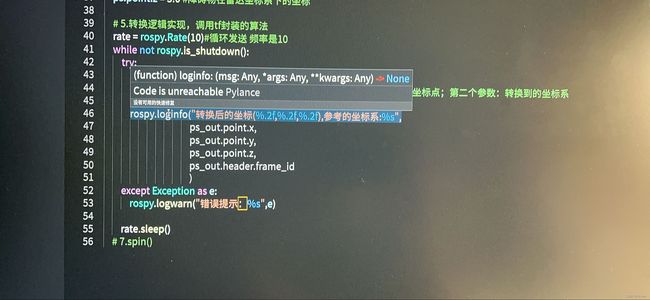
# 5.转换逻辑实现,调用tf封装的算法
rate = rospy.Rate(10)#循环发送 频率是10
while not rospy.is_shutdown():
try:
#转换实现
ps_out = buffer.transform(ps,"base_link") #第一个参数:被转换的坐标点;第二个参数:转换到的坐标系
#输出结果
rospy.loginfo("转换后的坐标(%.2f,%.2f,%.2f),参考的坐标系:%s",
ps_out.point.x,
ps_out.point.y,
ps_out.point.z,
ps_out.header.frame_id
)
except Exception as e:
rospy.logwarn("错误提示:%s",e)
rate.sleep()
这里顺便记录一下玄学问题,在vscode里我的rospy.loginfo一直显示无效,在循环里。
- 新开一个命令行:
roscore
新开一个命令行:
cd workspace
source ./devel/setup.bash
rosrun tf01_static demo01_static_pub_p.py
新开一个命令行:
cd workspace
source ./devel/setup.bash
rosrun tf01_static demo02_static_sub_p.py
- 补充
当坐标系之间的相对位置固定时,那么所需参数也是固定的: 父系坐标名称、子级坐标系名称、x偏移量、y偏移量、z偏移量、x 翻滚角度、y俯仰角度、z偏航角度,实现逻辑相同,参数不同,那么 ROS 系统就已经封装好了专门的节点,使用方式如下:
rosrun tf2_ros static_transform_publisher x偏移量 y偏移量 z偏移量 z偏航角度 y俯仰角度 x翻滚角度 父级坐标系 子级坐标系
示例:rosrun tf2_ros static_transform_publisher 0.2 0 0.5 0 0 0 /baselink /laser
也建议使用该种方式直接实现静态坐标系相对信息发布。
3.动态坐标变换
所谓动态坐标变换,是指两个坐标系之间的相对位置是变化的。
需求描述:
启动 turtlesim_node,该节点中窗体有一个世界坐标系(左下角为坐标系原点),乌龟是另一个坐标系,键盘控制乌龟运动,将两个坐标系的相对位置动态发布。
实现分析:
- 乌龟本身不但可以看作坐标系,也是世界坐标系中的一个坐标点
- 订阅 turtle1/pose,可以获取乌龟在世界坐标系的x坐标、y坐标、偏移量以及线速度和角速度
- 将 pose 信息转换成 坐标系相对信息并发布
实现流程:
- 新建功能包,添加依赖
- 创建坐标相对关系发布方(同时需要订阅乌龟位姿信息)
- 创建坐标相对关系订阅方
- 执行
- 创建功能包
创建项目功能包依赖于 tf2、tf2_ros、tf2_geometry_msgs、roscpp rospy std_msgs geometry_msgs、turtlesim - 发布方
代码如下:
#! /usr/bin/env python2.7
#encoding:utf-8
import rospy
from turtlesim.msg import Pose
import tf2_ros
from geometry_msgs.msg import TransformStamped
from tf.transformations import quaternion_from_euler
"""
发布方:订阅乌龟的位姿信息,转换成坐标系的相对关系,再发布
准备
话题:/turtle/pose
类型:/turtlesim/Pose
流程:
1.导包
2.初始化ROS节点
3.创建订阅对象
4.回调函数处理订阅到的消息(核心)
5.spin()
"""
#回调函数:
def doPose(pose): #参数是订阅到的消息
#创建发布坐标系相对关系的对象
pub = tf2_ros.TransformBroadcaster()
#将pose转换成坐标系相对关系消息
ts = TransformStamped()
ts.header.frame_id = "world" #被参考的坐标系是世界坐标系 父级坐标系
ts.header.stamp = rospy.Time.now()
ts.child_frame_id = "turtle1"
#子级坐标系相对于父级坐标系的偏移量
ts.transform.translation.x = pose.x
ts.transform.translation.y = pose.y
ts.transform.translation.z = 0 #2D 没有z轴
# 四元数
#从欧拉角转换四元数
"""
乌龟是2D的,不存在x上的翻滚,y上的俯仰,只有z上的偏航
欧拉角:0 0 pose.theta
"""
qtn = quaternion_from_euler(0,0,pose.theta)
ts.transform.rotation.x = qtn[0]
ts.transform.rotation.y = qtn[1]
ts.transform.rotation.z = qtn[2]
ts.transform.rotation.w = qtn[3]
#发布
pub.sendTransform(ts)
if __name__ == "__main__":
# 2.初始化ROS节点
rospy.init_node("dynamic_pub_p")
# 3.创建订阅对象
sub = rospy.Subscriber("/turtle1/pose",Pose,doPose,queue_size=100) #name话题名称, data_class消息类型, callback=None回调函数, queue_size=None队列长度
# 4.回调函数处理订阅到的消息(核心)
# 5.spin()
rospy.spin()
打开一个命令行:roscore
打开一个命令行:rosrun turtlesim turtlesim_node
打开一个命令行:rosrun turtlesim turtle_teleop_key
打开一个命令行:
cd工作空间
source ./devel/setup.bash
rosrun tf02_dynamic demo01_dynamic_pub_p.py
打开一个命令行:rviz
- 订阅方
代码如下:
#! /usr/bin/env python2.7
#encoding:utf-8
import rospy
import tf2_ros
import tf2_geometry_msgs
"""
订阅方:订阅坐标变换消息,传输被转换的坐标点,调用转换算法
流程:
1.导包
2.初始化
3.创建订阅对象
4.组织被转换的坐标点
5.转换逻辑实现,调用tf封装的算法
6.输出结果
"""
if __name__ == "__main__":
# 2.初始化
rospy.init_node("static_sub_p")
# 3.创建订阅对象
#3-1创建缓存对象
buffer = tf2_ros.Buffer()
#3-2创建订阅对象(将缓存存入)
sub = tf2_ros.TransformListener(buffer)
# 4.组织被转换的坐标点 不要使用 geometry_msgs,需要使用 tf2 内置的消息类型
ps = tf2_geometry_msgs.PointStamped()
#时间戳 --0
ps.header.stamp = rospy.Time() #不设置时间
ps.header.frame_id = "turtle1" #坐标系是乌龟坐标系
ps.point.x = 2.0
ps.point.y = 3.0
ps.point.z = 5.0 #障碍物在雷达坐标系下的坐标
# 5.转换逻辑实现,调用tf封装的算法
rate = rospy.Rate(10)#循环发送 频率是10
while not rospy.is_shutdown():
try:
#转换实现
ps_out = buffer.transform(ps,"world") #第一个参数:被转换的坐标点;第二个参数:转换到的坐标系
#输出结果
rospy.loginfo("转换后的坐标(%.2f,%.2f,%.2f),参考的坐标系:%s",
ps_out.point.x,
ps_out.point.y,
ps_out.point.z,
ps_out.header.frame_id
)
except Exception as e:
rospy.logwarn("错误提示:%s",e)
rate.sleep()
这里需要注意,不设置now时间,以免时间异常报错
打开一个命令行:roscore
打开一个命令行:rosrun turtlesim turtlesim_node
打开一个命令行:rosrun turtlesim turtle_teleop_key
打开一个命令行:
cd工作空间
source ./devel/setup.bash
rosrun tf02_dynamic demo01_dynamic_pub_p.py
打开一个命令行:
cd工作空间
source ./devel/setup.bash
rosrun tf02_dynamic demo02_dynamic_sub_p.py
4.多坐标变换
需求描述:
现有坐标系统,父级坐标系统 world,下有两子级系统 son1,son2,son1 相对于 world,以及 son2 相对于 world 的关系是已知的,求 son1原点在 son2中的坐标,又已知在 son1中一点的坐标,要求求出该点在 son2 中的坐标
实现分析:
- 首先,需要发布 son1 相对于 world,以及 son2 相对于 world 的坐标消息
- 然后,需要订阅坐标发布消息,并取出订阅的消息,借助于 tf2 实现 son1 和 son2 的转换
- 最后,还要实现坐标点的转换
实现流程:
- 新建功能包,添加依赖
- 创建坐标相对关系发布方(需要发布两个坐标相对关系)
- 创建坐标相对关系订阅方
- 执行
- 创建功能包
创建项目功能包依赖于 tf2、tf2_ros、tf2_geometry_msgs、roscpp rospy std_msgs geometry_msgs - 发布方
为了方便,使用静态坐标变换发布,采用launch文件
代码如下:
<launch>
<node pkg="tf2_ros" type="static_transform_publisher" name="son1" args="5 0 0 0 0 0 /world /son1" output = "screen" />
<node pkg="tf2_ros" type="static_transform_publisher" name="son2" args="3 0 0 0 0 0 /world /son2" output = "screen" />
launch>
打开一个命令行:
cd workspace
source ./devel/setup.bash
roslaunch tf03_tfs tfs_c.launch
打开一个命令行:rviz
- 订阅方
代码如下:
#! /usr/bin/env python2.7
#encoding:utf-8
from gettext import translation
from cv2 import transform
import rospy
import tf2_ros
import tf2_geometry_msgs
from geometry_msgs.msg import TransformStamped
if __name__ == "__main__":
# 2.初始化
rospy.init_node("frame_sub_p")
# 3.创建订阅对象
#3-1创建缓存对象
buffer = tf2_ros.Buffer()
#3-2创建订阅对象(将缓存存入)
sub = tf2_ros.TransformListener(buffer)
# 4.组织被转换的坐标点 不要使用 geometry_msgs,需要使用 tf2 内置的消息类型
ps = tf2_geometry_msgs.PointStamped()
#时间戳 --0
ps.header.stamp = rospy.Time() #不设置时间
ps.header.frame_id = "son1" #坐标系是son1坐标系
ps.point.x = 1.0
ps.point.y = 2.0
ps.point.z = 3.0 #障碍物在son1坐标系下的坐标
# 5.转换逻辑实现,调用tf封装的算法
rate = rospy.Rate(10)#循环发送 频率是10
while not rospy.is_shutdown():
try:
#核心:计算son1相对于son2的坐标关系
ts = buffer.lookup_transform("son2","son1",rospy.Time(0)) #target_frame: 目标坐标系, source_frame: 原坐标系, time: 0 即时间间隔最近的关系 返回值:son1与son2的坐标系关系
rospy.loginfo("父级坐标系:%s,子级坐标系:%s,偏移量(%.2f,%.2f,%.2f)",
ts.header.frame_id,
ts.child_frame_id,
ts.transform.translation.x,
ts.transform.translation.y,
ts.transform.translation.z
)
#转换实现
ps_out = buffer.transform(ps,"son2") #第一个参数:被转换的坐标点;第二个参数:转换到的坐标系
#输出结果
rospy.loginfo("转换后的坐标(%.2f,%.2f,%.2f),参考的坐标系:%s",
ps_out.point.x,
ps_out.point.y,
ps_out.point.z,
ps_out.header.frame_id
)
except Exception as e:
rospy.logwarn("错误提示:%s",e)
rate.sleep()
打开一个命令行:
cd workspace
source ./devel/setup.bash
roslaunch tf03_tfs tfs_c.launch
打开一个命令行:rviz
打开一个命令行:
cd workspace
source ./devel/setup.bash
rosrun tf03_tfs demo01_tfs_p.py
5.坐标系关系查看
在机器人系统中,涉及的坐标系有多个,为了方便查看,ros 提供了专门的工具,可以用于生成显示坐标系关系的 pdf 文件,该文件包含树形结构的坐标系图谱。
首先调用rospack find tf2_tools查看是否包含该功能包,如果没有,请使用如下命令安装:
注意我的版本是ubuntu18.04,ros版本是melodic
采用以下命令安装:sudo apt install ros-melodic-tf2-tools
打开一个命令行:
cd workspace
source ./devel/setup.bash
roslaunch tf03_tfs tfs_c.launch
打开一个命令行:rosrun tf2_tools view_frames.py
输出
[INFO] [1656589364.526404]: Listening to tf data during 5 seconds...
[INFO] [1656589369.567883]: Generating graph in frames.pdf file...
会在当前路径下生成pdf文件
输入evince frames.pdf即可查看
总结
以上就是今天要讲的内容,本文仅仅简单记录了TF坐标变换,如果有问题请在博客下留言或者咨询邮箱:[email protected]。