ROS2自学笔记:话题
话题实现节点之间的通讯。话题有这样几个基本特定:
1 发布、订阅模型:发出一个话题的节点称为发布者,接受一个话题的节点称为订阅者
2 订阅者和发布者不唯一:每一个节点都可以发布或订阅话题,实现多对多通信
3 异步通信:一个话题发布后可以在之后被订阅
4 .msg文件定义通信的消息结构:话题通信有着标准的通信格式,称为消息
示例:hello world发布及订阅
发布者:
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
class PublisherNode(Node):
def __init__(self, name):
super().__init__(name)
self.pub = self.create_publisher(String, "chatter", 10)
self.timer = self.create_timer(0.5, self.timer_callback)
def timer_callback(self):
msg = String()
msg.data = 'Hello World'
self.pub.publish(msg)
self.get_logger().info('Publishing: "%s"' % msg.data)
def main(args=None):
rclpy.init(args=args)
node = PublisherNode("topic_helloworld_pub")
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
1 from std_msgs.msg import String
导入String消息类型
2 self.pub = self.create_publisher(String, “chatter”, 10)
创建发布者对象self.pub,构造方法为create_publisher,该方法三个参数:消息类型,消息名称,缓存长度(对于无法及时发出的话题,会缓存10桢,之后删去老信息)
3 self.timer = self.create_timer(0.5, self.timer_callback)
创建计时器self.timer,参数:以秒为单位的时间,每次计时结束后执行方法
4 self.pub.publish(msg)
发布消息msg,msg为之前创建的String
5 self.get_logger().info(‘Publishing: “%s”’ % msg.data)
在终端打出信息Publishing: Hello World
订阅者:
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
class SubscriberNode(Node):
def __init__(self, name):
super().__init__(name)
self.sub=self.create_subscription(String, "chatter", self.listener_callback, 10)
def listener_callback(self, msg):
self.get_logger().info('I heard: "%s"' % msg.data)
def main(args=None):
rclpy.init(args=args)
node = SubscriberNode("topic_helloworld_sub")
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
1 self.sub=self.create_subscription(String, “chatter”, self.listener_callback, 10)
创建订阅者对象self.sub,构造方法create_subscription参数:消息类型,消息名称,收到消息后执行的函数,缓存大小
注意这里由于是异步通信,不需要考虑收到消息的时间,只要收到消息就会进行listener_callback操作(类似于中断原理)
2 self.get_logger().info(‘I heard: “%s”’ % msg.data)
在终端打出I heard: Hello World
不要忘记在setup文件声明入口
entry_points={
'console_scripts': [
'topic_helloworld_pub = learning_topic.topic_helloworld_pub:main',
'topic_helloworld_sub = learning_topic.topic_helloworld_sub:main'
]
}
话题通信流程:
发布者:
1 创建发布者对象
2 创建话题内容
3 发布话题
订阅者:
1 创建订阅者对象
2 创建回调函数
3 设置要接受的话题以创建回调函数
示例2:相机检测红色
该程序使用电脑相机检测红色,并用绿框标注
这里使用了opencv,因此先确认是否下载
apt install python3-opencv
该程序中发布者为相机程序topic_webcam_pub,订阅者为topic_webcam_sub
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import Image
from cv_bridge import CvBridge
import cv2
class ImagePublisher(Node):
def __init__(self, name):
super().__init__(name)
self.publisher = self.create_publisher(Image, 'image_raw', 10)
self.timer = self.create_timer(0.1, self.timer_callback)
self.cap = cv2.VideoCapture(0)
self.cv_bridge = CvBridge()
def timer_callback(self):
ret, frame = self.cap.read()
if ret == True:
self.publisher.publish(self.cv_bridge.cv2_to_imgmsg(frame, 'bgr8'))
self.get_logger().info('Publishing video frame')
def main(args=None):
rclpy.init(args=args)
node = ImagePublisher("topic_webcam_pub")
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
说明:
1 import rclpy
from rclpy.node import Node
from sensor_msgs.msg import Image
from cv_bridge import CvBridge
import cv2
引入必要的库,其中CvBridge是opencv和ROS2消息图片类型转换工具,Image是图片消息类型
2 self.publisher = self.create_publisher(Image, ‘image_raw’, 10)
创建发布者对象,类型为Image,名称为image_raw,缓存区为10
3 self.cap = cv2.VideoCapture(0)
获取相机图片的对象
4 self.publisher.publish(self.cv_bridge.cv2_to_imgmsg(frame, ‘bgr8’))
发布图片,这里使用cv_bridge对图片进行类型转换
5 rclpy.spin(node)
循环等待程序退出
订阅者:
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import Image
from cv_bridge import CvBridge
import cv2
import numpy as np
lower_red = np.array([0, 90, 128])
upper_red = np.array([180, 255, 255])
class ImageSubscriber(Node):
def __init__(self, name):
super().__init__(name)
self.sub = self.create_subscription(Image, 'image_raw', self.listener_callback, 10)
self.cv_bridge = CvBridge()
def object_detect(self, image):
hsv_img = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
mask_red = cv2.inRange(hsv_img, lower_red, upper_red)
contours, hierarchy = cv2.findContours(mask_red, cv2.RETR_LIST, cv2.CHAIN_APPROX_NONE)
for cnt in contours:
if cnt.shape[0] < 150:
continue
(x, y, w, h) = cv2.boundingRect(cnt)
cv2.drawContours(image, [cnt], -1, (0, 255, 0), 2)
cv2.circle(image, (int(x + w / 2), int(y + h / 2), 5, (0, 255, 0), -1)
cv2.imshow("object", image)
cv2.waitKey(10)
def listener_callback(self, data):
self.get_logger().info('Receiving video frame')
image = self.cv_bridge.imgmsg_to_cv2(data, 'bgr8')
self.object_detect(image)
def main(args=None):
rclpy.init(args=args)
rclpy.ImageSubscriber("topic_webcam_sub")
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
1 lower_red = np.array([0, 90, 128])
upper_red = np.array([180, 255, 255])
设置颜色范围,这一范围内的颜色会被判断为红色
2 sub.sub = self.create_subscription(Image, ‘image_raw’, self.listener_callback, 10)
创建订阅者对象,接收消息类型Image,消息名称image_raw,接收消息后执行方法self.listener_callback,缓存大小10
3 hsv_img = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
将BGR图像转化为更容易处理的HSV图像
4 mask_red = cv2.inRange(hsv_img, lower_red, upper_red)
图像二值化
5 contours, hierarchy = cv2.findContours(mask_red, cv2.RETR_LIST, cv2.CHAIN_APPROX_NONE)
检测轮廓
6 if cnt.shape[0] < 150:
continue
去除过小的轮廓
7 (x, y, w, h) = cv2.boundingRect(cnt)
得到x:左上角x坐标,y:左上角y坐标,w:宽,h:高
8 cv2.drawContours(image, [cnt], -1, (0, 255, 0), 2)
画出轮廓
9 cv2.circle(image, (int(x + w / 2), int(y + h / 2), 5, (0, 255, 0), -1)
点出中心点
10 self.get_logger().info(‘Receiving video frame’)
在终端打出信息Receiving video frame
11 self.object_detect(image)
执行图像处理函数
12 rclpy.ImageSubscriber(“topic_webcam_sub”)
创建节点对象
最后别忘了声明入口
entry_points={
'console_scripts': [
'topic_webcam_pub = learning_topic.topic_webcam_pub:main',
'topic_webcam_sub = learning_topic.topic_webcam_sub:main'
],
}
安装USB相机驱动
apt install ros-foxy-usb-cam
启动发布者:
ros2 run usb_cam usb_cam_node_exe
启动订阅者:
ros2 run learning_topic topic_webcam_sub
执行结果如下
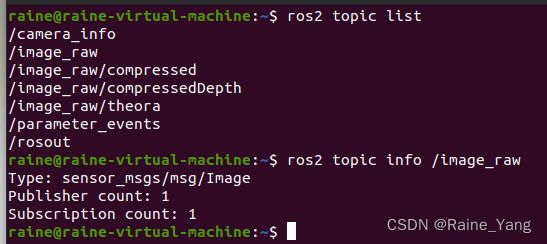
监测话题:
1 获取话题列表
ros2 topic list
2 获取话题信息
ros2 topic info (话题名)
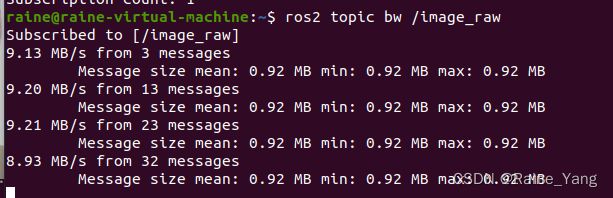
3 获取话题带宽
ros2 topic bw (话题名)
4 获取话题详细信息
ros2 topic echo (话题名)

显示当前节点结构图
rqt_graph