Robosense(速腾)16线激光雷达Xavier ROS配置(含常见报错及解决方法)
配置需要:windows电脑一台,网线,Ubuntu设备一台或Xavier
本文记录16线激光雷达配置
需要再最前面说明的是不同版本的激光雷达配置大致相同,但是由于一般需要和其他设备如相机等协同,需要调整到同一IP,但调整IP的方式不同版本并不相同。

配置以太网到192.168.1.102(若不确定可使用wireshark查看)或192.168.1.xx
更改后若显示一下则成功(下图已改过IP)

打开RSview,File->Open->sensor stream选择16线雷达,模式任意,在density下成功显示

此时根据需要修改配置,Tools->RS Lidar infaormation
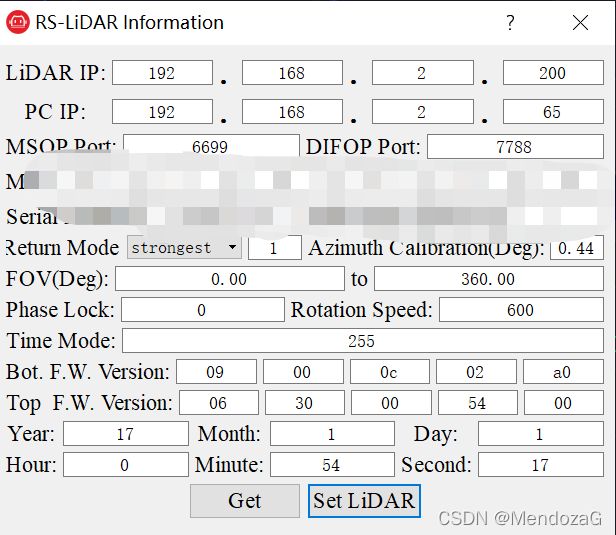
点击Get,获取目前连接的信息,根据你的需求改变设备IP、回波模式、UTC时间等其他信息,更改完毕后点击Set Lidar,等待配置完成,若更改网段还需要重新设置以太网网段,值得注意的是PC IP必须和修改的相同否则能够ping通但无法获取(点到点)。
重新调整后测试成功,在ros上安装
cd ~
mkdir -p catkin_ws/src
git clone https://github.com/RoboSense-LiDAR/ros_rslidar安装libcap-dev(capture lib development kit)
sudo apt-get install libpcap-dev将driver和pointcloud改为可运行的
cd ~/catkin_ws/src/ros_rslidar/rslidar_drvier
chmod 777 cfg/*
cd ~/catkin_ws/src/ros_rslidar/rslidar_pointcloud
chmod 777 cfg/*
回到catkin目录安装
cd ~/catkin_ws
catkin_make需要注意的是在Xavier安装时会报错,找不到opencv,这是因为Xavier默认给出的是opencv4,需要按照路径打开 cv_bridgeconfig.cmake,搜索opencv,共两处

注意,opencv4后面均无空格!!
if(NOT "include;/usr/include;/usr/include/opencv4" STREQUAL " ")
set(cv_bridge_INCLUDE_DIRS "")
set(_include_dirs"include;/usr/include;/usr/include/opencv4")修改完毕后会成功生成
配置网络,设置以太网IPV4 IP为上面windows中设置的,只能设置为该IP!!!(我的设置为192.168.2.65)
尝试ping 192.168.2.200
运行节点
cd ~/catkin_ws
source devel/setup.bash
roslaunch rslidar_pointcloud rs_lidar_16.launch
若显示poll() timeout检查连接,重启Xavier尝试。
成功显示点云:
-----------------------------------------------------------------------------------------------------------------------------------
常见报错及解决方法:
1.缺少pcl :Could not find a package configuration file provided by “pcl_ros“
需要安装对应版本的pcl :(melodic处替换为你对应的版本)
sudo apt-get install ros-meodicc-pcl-ros2.显示 没有 plus等报错
这是编译的C++版本问题,需要在CmakeLists.txt中加上
set(CMAKE_CXX_STANDARD 14)3.出现:Killed signal terminated program cc1plus
常出现于虚拟机,这是内存不够导致的,关闭虚拟机分配更大的内存即可。