FPGA实现的SPI协议(一)----SPI驱动
写在前面
SPI协议系列文章:
FPGA实现的SPI协议(一)----SPI驱动
FPGA实现的SPI协议(二)----基于SPI接口的FLASH芯片M25P16的使用
1、什么是SPI协议
SPI(Serial Peripheral Interface,串行外围设备接口)通讯协议,是 Motorola 公司提出的一种同步串行接口技术,是一种高速、全双工、同步通信总线,在芯片中只占用四根管脚用来控制及数据传输,广泛用于 EEPROM、Flash、RTC(实时时钟)、ADC(数模转换 器)、DSP(数字信号处理器)以及数字信号解码器上,是常用的、重要的低速通讯协议之一。
SPI 通讯协议的优点是支持全双工通信,通讯方式较为简单,且相对数据传输速率较快;缺点是没有指定的流控制,没有应答机制,在数据可靠性上有一定缺陷。
2、SPI协议详述
2.1、SPI协议物理层
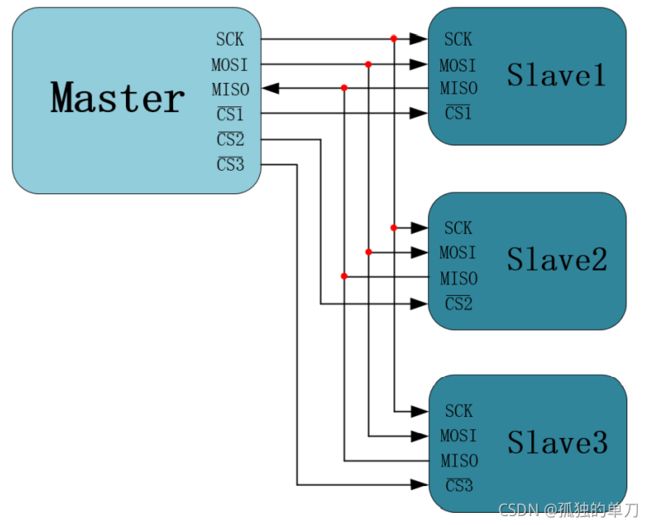
SPI 通讯设备的通讯模式是主从通讯模式,通讯双方有主从之分,根据从机设备的数量,SPI 通讯设备之间的连接方式可分为一主一从和一主多从。
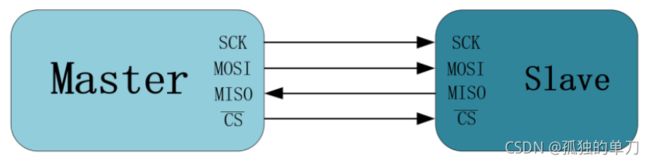
SPI总线传输只需要4根线就能完成,这四根线的作用分别如下:
- SCK (Serial Clock):时钟信号线,用于同步通讯数据。由通讯主机产生,决定了通讯的速率,不同的设备支持的最高时钟频率不同
- MOSI (Master Output, Slave Input):主设备输出/从设备输入引脚。主机的数据从这条信号线输出,从机由这条信号线读入主机发送的数据,数据方向由主机到从机
- MISO (Master Input,Slave Output):主设备输入/从设备输出引脚。主机从这条信号线读入数据,从机的数据由这条信号线输出到主机,数据方向由从机到主机
- CS (Chip Select):片选信号线。当有多个 SPI 从 设备与 SPI 主机相连时,设备的其它信号线 SCK、MOSI 及 MISO 同时并联到相同的 SPI 总线上,即无论有多少个从设备,都共同使用这 3 条总线;而每个从设备都有独立的片选信号线,即有多少个从设备,就有多少条片选信号线。相当于由SPI构成的通信系统中,通过CS片选信号来决定通信的从机设备是哪一台。通信期间低电平有效,表示对应从机被选中
2.2、SPI 协议层
SPI总线传输一共有4种模式,这4种模式分别由时钟极性(CPOL,Clock Polarity)和时钟相位(CPHA,Clock Phase)来定义,其中CPOL参数规定了SCK时钟信号空闲状态的电平,CPHA规定了数据是在SCK时钟的上升沿被采样还是下降沿被采样。
SPI总线的极性--时钟极性
时钟极性决定SPI总线空闲时的时钟信号是高电平还是低电平。CPOL = 1:表示空闲时是高电平;CPOL = 0:表示空闲时是低电平。
SPI总线的相位--时钟相位
时钟相位决定SPI总线从哪个跳变沿开始采样数据。CPHA = 0:在时钟信号SCK的第1个跳变沿采样;CPHA = 1:在时钟信号SCK的第2个跳变沿采样。
这四种模式的时序图如下图所示:
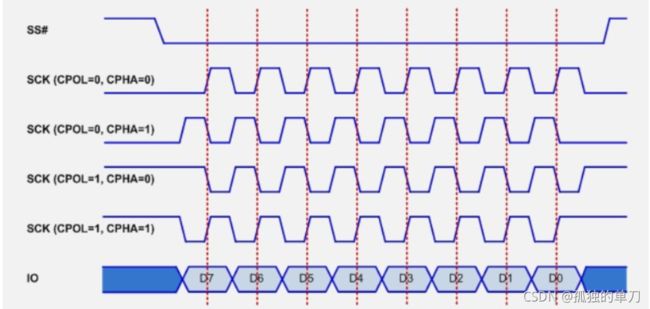
- 模式0:CPOL= 0,CPHA=0。SCK串行时钟线空闲是为低电平,数据在SCK时钟的上升沿被采样,数据在SCK时钟的下降沿切换
- 模式1:CPOL= 0,CPHA=1。SCK串行时钟线空闲是为低电平,数据在SCK时钟的下降沿被采样,数据在SCK时钟的上升沿切换
- 模式2:CPOL= 1,CPHA=0。SCK串行时钟线空闲是为高电平,数据在SCK时钟的下降沿被采样,数据在SCK时钟的上升沿切换
- 模式3:CPOL= 1,CPHA=1。SCK串行时钟线空闲是为高电平,数据在SCK时钟的上升沿被采样,数据在SCK时钟的下降沿切换
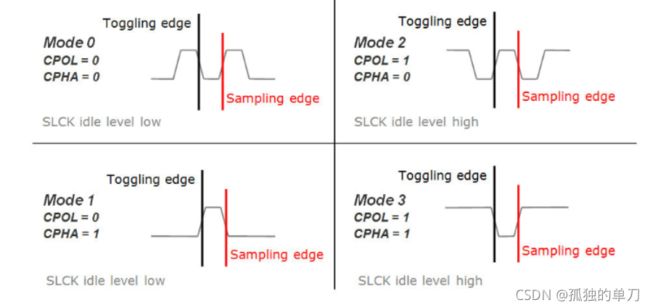
经常用到的是模式0和模式3(毕竟在下降沿采集数据的还是少)。下图描述了4种模式数据线MOSI和MISO的数据切换(Toggling)位置和数据采样位置的关系。
2.3、SPI协议通信过程
下面以模式 0 为例,讲解一下 SPI 基本的通讯过程:
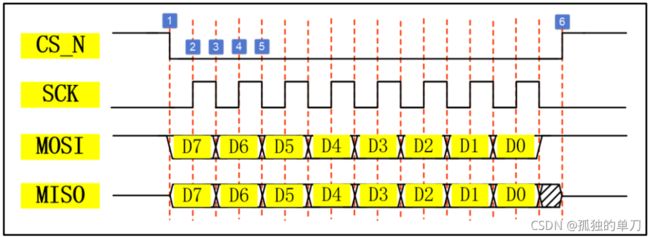
SCK、MOSI、CS_N 信号均由主机控制产生, SCK 是时钟信号,用以同步数据,MOSI 是主机输出从机输入信号,主机通过此信号线传输数据给从机,CS_N 为片选信号,用以选定从机设备,低电平有效;而 MISO 的信号由 从机产生,主机通过该信号线读取从机的数据。MOSI 与 MISO 的信号只在 CS_N 为低电平的时候才有效,在 SCK 的每个时钟周期 MOSI 和 MISO 传输一位数据。
在图中的标号1处,CS_N 信号线由高变低,是 SPI 通讯的起始信号。CS_N 是每 个从机各自独占的信号线,当从机在自己的 CS_N 线检测到起始信号后,就知道自己被主 机选中了,开始准备与主机通讯。在图中的标号6处,CS_N 信号由低变高,是 SPI 通讯的停止信号,表示本次通讯结束,从机的选中状态被取消。
SPI 使用 MOSI 及 MISO 信号线来传输数据,使用 SCK 信号线进行数据同步。MOSI 及 MISO 数据线在 SCK 的每个时钟周期传输一位数据,且数据输入输出是同时进行的。数据传输时,MSB 先行或 LSB 先行并没有作硬性规定,但要保证两个 SPI 通讯设备之间使用同样的协定,一般都会采用MSB 先行模式。 MOSI 及 MISO 的数据在 SCK 的下降沿期间变化输出, 在 SCK 的上升沿时被采样。即在 SCK 的上升沿时刻,MOSI 及 MISO 的数据有效,高电平时表示数据“1”,为低电平时表示数据“0”。在其它时刻,数据无效,MOSI 及 MISO 为下一次表示数据做准备。
SPI 每次数据传输可以 8 位或 16 位为单位,每次传输的单位数不受限制。
2.4、SPI协议的特性
- SPI协议是一主多从的架构,通过片选信号CS来区分不同的从机(寻址方式)
- SPI协议是一种同步(Synchronous)传输协议,通信双方通过主机生成的时钟信号SCK来作为数据交换的基准信号
- SPI协议是一种全双工的串行通信协议,通信过程中主从双方均可进行数据交换
- SPI协议具有4中通信模式,依据双方约定好的模式进行通信
2.5、SPI协议的优势、劣势
优势:
- 全双工串行通信
- 简单的硬件结构
- 高速数据传输速率(相比UART、IIC)
- 灵活的数据传输方式,不限于8位,可以是任意大小的字
劣势:
- 仅支持一个主设备
- 引脚略多(相比UART、IIC)
- 没有硬件从机应答信号(主机可能在不知情的情况下无处发送)
3、驱动代码的设计实现
接下来实现的SPI驱动代码特性如下:MSB 先行;仅限模式0;每次传输8位(1个BYTE)。
3.1、接口定义与整体设计
SPI驱动的整体框图、输入输出信号如下所示:
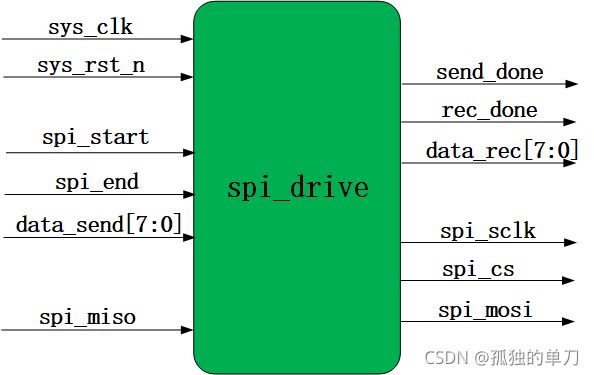
其中信号描述如下:
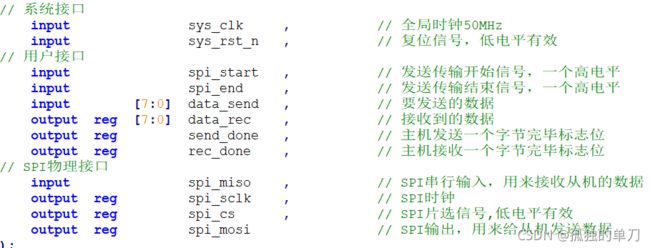
该模块的使用方法如下:
- 拉高SPI传输开始信号spi_start一个周期,同时发送要传输的数据给data_send,等待数据发送完成后,该模块会将发送完成标志信号 send_done拉高一个周期,标志一个BYTE的数据通过SPI总线发送给了从机
- 同样的,当接收完成标志信号rec_done被该模块拉高后,则意味着,主机成功接收了一个BTYE从机发送过来的数据
- 当主机希望结束这次传输时,可将SPI结束信号spi_end拉高一个周期,则该模块会在发送最后一个模块后结束SPI传输,这也意味着,如果没有结束到SPI结束信号,则SPI传输会一直进行,以便实现多个BYTE的SPI传输
3.2、Verilog代码
Verilog代码并不复杂,结合下图的SPI通信过程,可以发现以下要点:
- SCK很适合使用系统时钟的4分频时钟,因为在一个SCK内需要对其进行4次操作
- 分别使用生成的SCK的上升沿、下降沿对其移位发送数据、接收数据即可
- 此外从下图可知,SPI的驱动非常适合使用状态机编写,有兴趣可以自己尝试一下
`timescale 1ns/1ns //时间单位/精度
// 模式0
module spi_drive
(
// 系统接口
input sys_clk , // 全局时钟50MHz
input sys_rst_n , // 复位信号,低电平有效
// 用户接口
input spi_start , // 发送传输开始信号,一个高电平
input spi_end , // 发送传输结束信号,一个高电平
input [7:0] data_send , // 要发送的数据
output reg [7:0] data_rec , // 接收到的数据
output reg send_done , // 主机发送一个字节完毕标志位
output reg rec_done , // 主机接收一个字节完毕标志位
// SPI物理接口
input spi_miso , // SPI串行输入,用来接收从机的数据
output reg spi_sclk , // SPI时钟
output reg spi_cs , // SPI片选信号,低电平有效
output reg spi_mosi // SPI输出,用来给从机发送数据
);
reg [1:0] cnt; //4分频计数器
reg [3:0] bit_cnt_send; //发送计数器
reg [3:0] bit_cnt_rec; //接收计数器
reg spi_end_req; //结束请求
//4分频计数器
always @(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)
cnt <= 2'd0;
else if(!spi_cs)begin
if(cnt == 2'd3)
cnt <= 2'd0;
else
cnt <= cnt + 1'b1;
end
else
cnt <= 2'd0;
end
// 生成spi_sclk时钟
always @(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)
spi_sclk <= 1'b0; //模式0默认为低电平
else if(!spi_cs)begin //在SPI传输过程中
if(cnt == 2'd0 )
spi_sclk <= 1'b0;
else if (cnt == 2'd2)
spi_sclk <= 1'b1;
else
spi_sclk <= spi_sclk;
end
else
spi_sclk <= 1'b0; //模式0默认为低电平
end
// 生成片选信号spi_cs
always @(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)
spi_cs <= 1'b1; //默认为高电平
else if(spi_start) //开始SPI准备传输,拉低片选信号
spi_cs <= 1'b0;
//收到了SPI结束信号,且结束了最近的一个BYTE
else if(spi_end_req && (cnt == 2'd1 && bit_cnt_rec == 4'd0))
spi_cs <= 1'b1; //拉高片选信号,结束SPI传输
end
// 生成结束请求信号(捕捉spi_end信号)
always @(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)
spi_end_req <= 1'b0; //默认不使能
else if(spi_cs)
spi_end_req <= 1'b0; //结束SPI传输后拉低请求
else if(spi_end)
spi_end_req <= 1'b1; //接收到SPI结束信号后就把结束请求拉高
end
// 发送数据过程--------------------------------------------------------------------
// 发送数据
always @(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)begin
spi_mosi <= 1'b0; //模式0空闲
bit_cnt_send <= 4'd0;
end
else if(cnt == 2'd0 && !spi_cs)begin //模式0的上升沿
spi_mosi <= data_send[7-bit_cnt_send]; //发送数据移位
if(bit_cnt_send == 4'd7) //发送完8bit
bit_cnt_send <= 4'd0;
else
bit_cnt_send <= bit_cnt_send + 1'b1;
end
else if(spi_cs)begin //非传输时间段
spi_mosi <= 1'b0; //模式0空闲
bit_cnt_send <= 4'd0;
end
else begin
spi_mosi <= spi_mosi;
bit_cnt_send <= bit_cnt_send;
end
end
// 发送数据标志
always @(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)
send_done <= 1'b0;
else if(cnt == 2'd0 && bit_cnt_send == 4'd7) //发送完了8bit数据
send_done <= 1'b1; //拉高一个周期,表示发送完成
else
send_done <= 1'b0;
end
// 接收数据过程--------------------------------------------------------------------
// 接收数据spi_miso
always @(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)begin
data_rec <= 8'd0;
bit_cnt_rec <= 4'd0;
end
else if(cnt == 2'd2 && !spi_cs)begin //模式0的上升沿
data_rec[7-bit_cnt_rec] <= spi_miso; //移位接收
if(bit_cnt_rec == 4'd7) //接收完了8bit
bit_cnt_rec <= 4'd0;
else
bit_cnt_rec <= bit_cnt_rec + 1'b1;
end
else if(spi_cs)begin
bit_cnt_rec <= 4'd0;
end
else begin
data_rec <= data_rec;
bit_cnt_rec <= bit_cnt_rec;
end
end
// 接收数据标志
always @(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)
rec_done <= 1'b0;
else if(cnt == 2'd2 && bit_cnt_rec == 4'd7) //接收完了8bit
rec_done <= 1'b1; //拉高一个周期,表示接收完成
else
rec_done <= 1'b0;
end
endmodule4、Testbench及仿真结果
4.1、单个BYTE的仿真
使用该SPI驱动,向从机发送单个BYTE数据8‘b01010101,观察其仿真时序是否正确:
//------------------------------------------------
//--SPI驱动仿真(模式0,1个BYTE)
//------------------------------------------------
`timescale 1ns/1ns //时间单位/精度
//------------<模块及端口声明>----------------------------------------
module tb_spi_drive();
//系统接口
reg sys_clk ; // 全局时钟50MHz
reg sys_rst_n ; // 复位信号,低电平有效
//用户接口
reg spi_start ; // 发送传输开始信号,一个高电平
reg spi_end ; // 发送传输结束信号,一个高电平
reg [7:0] data_send ; // 要发送的数据
wire [7:0] data_rec ; // 接收到的数据
wire send_done ; // 主机发送一个字节完毕标志位
wire rec_done ; // 主机接收一个字节完毕标志位
//SPI物理接口
reg spi_miso ; // SPI串行输入,用来接收从机的数据
wire spi_sclk ; // SPI时钟
wire spi_cs ; // SPI片选信号
wire spi_mosi ; // SPI输出,用来给从机发送数据
//仿真用
reg [3:0] cnt_send ; //发送数据计数器,0-15
//------------<例化SPI驱动模块(模式0)>----------------------------------------
spi_drive spi_drive_inst(
.sys_clk (sys_clk ),
.sys_rst_n (sys_rst_n ),
.spi_start (spi_start ),
.spi_end (spi_end ),
.data_send (data_send ),
.data_rec (data_rec ),
.send_done (send_done ),
.rec_done (rec_done ),
.spi_miso (spi_miso ),
.spi_sclk (spi_sclk ),
.spi_cs (spi_cs ),
.spi_mosi (spi_mosi )
);
//------------<设置初始测试条件>----------------------------------------
initial begin
sys_clk = 1'b0; //初始时钟为0
sys_rst_n <= 1'b0; //初始复位
spi_start <= 1'b0;
data_send <= 8'd0;
spi_miso <= 1'bz;
spi_end <= 1'b0;
#80 //80个时钟周期后
sys_rst_n <= 1'b1; //拉高复位,系统进入工作状态
#30 //30个时钟周期后拉高SPI开始信号,开始SPI传输
spi_start <= 1'b1;data_send <= 8'b01010101;
#20
spi_start <= 1'b0;
@(posedge send_done) //一个BYTE发送完成
spi_end <= 1'b1; #20 spi_end <= 1'b0; //拉高一个周期结束信号
end
//------------<设置时钟>----------------------------------------------
always #10 sys_clk = ~sys_clk; //系统时钟周期20ns
endmodule仿真结果如下:

可以看到,在拉高了spi_start开始传输信号后,主机开始发送数据,MOSI上的数据分别是01010101,发送完一个BYTE的数据后,send_done拉高。此时拉高结束信号spi_end,就终结了这次SPI传输,完成了单个BYTE的SPI传输。
4.2、多个BYTE的仿真
使用该SPI驱动,依次向从机发送数据8‘d0~8‘d10,观察其仿真时序是否正确:
//------------------------------------------------
//--SPI驱动仿真(模式0)
//------------------------------------------------
`timescale 1ns/1ns //时间单位/精度
//------------<模块及端口声明>----------------------------------------
module tb_spi_drive();
//系统接口
reg sys_clk ; // 全局时钟50MHz
reg sys_rst_n ; // 复位信号,低电平有效
//用户接口
reg spi_start ; // 发送传输开始信号,一个高电平
reg spi_end ; // 发送传输结束信号,一个高电平
reg [7:0] data_send ; // 要发送的数据
wire [7:0] data_rec ; // 接收到的数据
wire send_done ; // 主机发送一个字节完毕标志位
wire rec_done ; // 主机接收一个字节完毕标志位
//SPI物理接口
reg spi_miso ; // SPI串行输入,用来接收从机的数据
wire spi_sclk ; // SPI时钟
wire spi_cs ; // SPI片选信号
wire spi_mosi ; // SPI输出,用来给从机发送数据
//仿真用
reg [3:0] cnt_send ; //发送数据计数器,0-15
//------------<例化SPI驱动模块(模式0)>----------------------------------------
spi_drive spi_drive_inst(
.sys_clk (sys_clk ),
.sys_rst_n (sys_rst_n ),
.spi_start (spi_start ),
.spi_end (spi_end ),
.data_send (data_send ),
.data_rec (data_rec ),
.send_done (send_done ),
.rec_done (rec_done ),
.spi_miso (spi_miso ),
.spi_sclk (spi_sclk ),
.spi_cs (spi_cs ),
.spi_mosi (spi_mosi )
);
//------------<设置初始测试条件>----------------------------------------
initial begin
sys_clk = 1'b0; //初始时钟为0
sys_rst_n <= 1'b0; //初始复位
spi_start <= 1'b0;
data_send <= 8'd0;
spi_miso <= 1'bz;
spi_end <= 1'b0;
#80 //80个时钟周期后
sys_rst_n <= 1'b1; //拉高复位,系统进入工作状态
#30 //30个时钟周期后拉高SPI开始信号,开始SPI传输
spi_start <= 1'b1; #20 spi_start <= 1'b0;
end
always@(posedge sys_clk or negedge sys_rst_n)begin
if(!sys_rst_n)begin
data_send <= 8'd0;
spi_end <= 1'b0;
cnt_send <= 4'd0;
end
else if(send_done)begin //数据发送完成
if(cnt_send == 4'd10)begin
cnt_send <= 4'd0;
spi_end <= 1'b1; //拉高结束标志,结束SPI传输过程
data_send <= 8'd0;
end
else begin
cnt_send <= cnt_send + 4'd1;
spi_end <= 1'b0;
data_send <= data_send + 4'd1; //发送数据累加
end
end
else begin
data_send <= data_send;
spi_end <= 1'b0; //其他时候保持SPI传输(不结束)
end
end
//------------<设置时钟>----------------------------------------------
always #10 sys_clk = ~sys_clk; //系统时钟周期20ns
endmodule仿真结果如下:
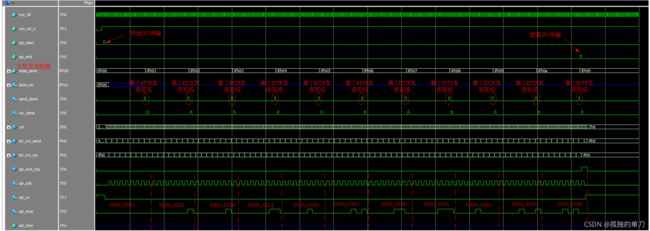
可以看到,在拉高了spi_start开始传输信号后,主机一直在发送数据,MOSI上的数据分别是8‘d0~8‘d10,每次发送一个BYTE的数据后,send_done即拉高一次。当结束信号spi_end被拉高后,就终结了这次SPI传输。
5、其他
- 需要注意的是,由于没有从机响应,所以MISO都是高阻态(蓝色)
- 下篇文章再结合从机(FLASH芯片)进行仿真验证接收数据功能
- 想要整个工程的朋友可以在评论区留下邮箱