oc 协议 回调 静态成员_AUTOSARETH协议栈调试笔记(一)
历时一个月左右的时间,总算是把AUTOSAR的ETH协议栈跑通了,也存在一些BUG需要后续解决。但是Eth->EthIf->TcpIp-SoAd->PduR->LdCom 数据流收发起码是OK的。

主要记录一下调试过程,好记性不如烂笔头。
第一步: 调试aurix397的ETH模块 和 EthTrcv(也就是PHY)。
最好用有OS操作系统的工程来调 ETH。
需阅读的文档:
AUTOSAR_SWS_EthernetDriver.pdf
AUTOSAR_SWS_EthernetTransceiverDriver.pdf
Aurix_MC-ISAR_UM_ETHDriver.pdf
Vector的技术手册也可以作参考,只是感觉用处对于Eth底层来说一般般,看SWS部分内容就可以了。Mcal里面的ETH的Demo倒是挺好的( 详见 Aurix_MC-ISAR_UM_ETHDriver.pdf )。
数据发送和数据接收API :(比较重要,以太网通信的数据链路层基础)。
Eth_17_EthMac_ProvideTxBuffer
Eth_17_EthMac_Transmit
Eth_17_EthMac_Receive
至于PHY,也就是ETH的收发器,这部分一般来说就是TJA1100,TJA1101,比较简单,工具链厂商会提供外设驱动库,自己也可以写这部分驱动。使用的是MII模式,注意MCAL的PORT的驱动能力,最好是增强型,否则有可能后续加协议栈后会挂掉。
具体测试方法: 使用CANOE来测试是否Get到ECU发出的数据。线要接对,切记切记@@@@
因为还没有涉及到上层的TCPIP协议栈,CANOE无需设置TCPIP,直接运行。
板子的远程MAC地址设置为FF:FF:FF:FF:FF:FF , 广播形式,保证CANOE能接受。
一般来说就OK了,问题不大,而且AUTOSAR的工具链对ETH的支持都很一般,还有很多不完善,MCAL层面上自己需要配置的工作量很少,也就意味着一出问题,百思不得解~
第二步: 集成ETHIF。
需阅读的文档:
AUTOSAR_SWS_EthernetInterface.pdf
添加EthIf静态代码,使用配置工具配置生成动态代码,加进去做集成,编译报错是免不了的,多调试多排查就OK了。这部分的EthIf代码实现比较简单,也容易看得懂。重点关注依然是
发送和接受API:
EthIf_ProvideTxBuffer
EthIf_Transmit
EthIf_RxIndication


Task 里面不再调用 ETH层的API来收发数据,而是调用EthIf层的API来发送和接受数据。如果调通的话。
CANOE接收到的数据就是 EthIf_ProvideTxBuffer 的 指针参数 BufIdxPtr 指向的数据,CANOE发出的数据会从ECU的底层回调到ETHIF的 EthIf_RxIndication 的
出参 DataPtr 。可以看地址存放的数据是否一致。@$%#@
第三步: 集成TCPIP和SOAD(重点:问题最多最难调,坑比较多@###)。
添加TcpIp和SoAd静态代码,使用配置工具配置生成动态代码,加进去做集成.也会出各种问题,需要不断地修改调整工具生成的动态代码cfg.c 和 cfg.h 等 文件。。。。。
需阅读的文档:
AUTOSAR_SWS_TcpIp.pdf
AUTOSAR_SWS_SocketAdaptor.pdf
这里TCPIP和SOAD的配置最好是也看看 Vector的技术手册,写的蛮好的。
TechnicalReference_TcpIp.pdf
TechnicalReference_SoAd.pdf

这两个最好一起做集成,因为SoAd的目的就是方便人们更好的使用以太网协议栈,TcpIp和SoAd一起集成的调试工作量反而会比单单调试TCPIP容易许多。这两个模块的配置,论配置量而言也不是很大,但是理解会有些困难,东西挺多,需要细化。
需要补充: IP地址,端口,单播、组播、广播。IPV4、Domain、ARP 、udp 、Socket、bind、connect 、listen 、open、close 等等。(TCP可以先不管,根据整车厂ETH技术规范, 实时性要求更高,UDP更具通用性 )等知识。
虽然是调通了,但问题较多,回头得重新理一理。。。。
测试方法: 依然使用CANOE,但是需要添加ETH激励,还要设置正确的IP地址和端口号。跟ECU里面设置的远程IP地址和端口保持一致。如果不一致,会一直发ARP寻址。ECU就是没应答。这里也可以尝试ping。如果能够ping通,说明TCPIP协议栈集成是OK的。
举个例子:
ECU也就是控制器自身的IP地址设置为 192.168.0.12 端口为 32000.
ECU内部设置它的远程IP地址为 192.168.0.14 端口号为 35000.
注意IP地址要在同一个网段。ECU软件设置基本是这样。
CANOE就得配置好 激励Node的IP地址为 192.168.0.14 ,端口号为 35000。
控制器ECU连上CANOE,硬件检查无误,上电运行,CANOE也运行(点击小闪电符号)。
CANOE出现如下画面: 画面太美。。感人。。。。说明控制器和上位机之间能够正常收发UDP通信正常。
TX : ARP :192.168.0.14 ask for MAC address of 192.168.0.12
RX : ARP : 192.168.0.12 has MAC address . 00:2E:23:00:11:02
balababalalalalla。。。。。。。
数据收发API:vector 源码会存在自定义的类似的API名称变体,注意一下。
TcpIp_RxIndication
TcpIp_UdpTransmit
SoAd_IfTransmit
SoAd_RxIndication


测试Tcpip和SoAd是否调通:
发送正常可以直接通过观察CANOE是否接收到板子发出的UDP报文。
接收可以看 SoAd_RxIndication 的 出参 RemoteAddrPtr 和 BufPtr
是否是 CANOE的IP地址和CANOE发送的数据。
第四步: 集成PDUR。
需阅读的文档:
AUTOSAR_SWS_PDURouter.pdf
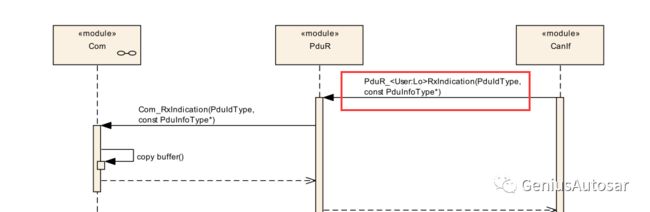
PDUR对于CAN、LIN、ETH,是通用的,容易实现。AUTOSAR 当前版本的SWS文档好像还没有添加ETH的SOAD到 PDUR的 Sequence diagrams 说明, 但是观察CANIF到PDUR的收发数据流的传递,可以推出SOAD到PDUR的大致的数据流的传递过程的。


第五步: 集成LdCom。
需阅读的文档:
AUTOSAR_SWS_LargeDataCOM.pdf
因为集成Com的时候出了一些问题,稍微有些麻烦,所以尝试用LdCom模块来收发数据。
优势有几下几点:
1、LdCom的源码的代码量也比Com模块的代码量要少,所以调试代码也比较方便,LdCom的API嗖的一下就直接调到PDUR的API,简单粗暴。
2、LdCom模块的配置工具需要配置的地方实在是太少了,工具链添加LdCom模块,仿佛立马就能编译通过的节奏。
3、LdCom 又名 : LargeDataCom 是用来传大数据的,ETH很合适。
调用的API接口:
发送: Std_ReturnType LdCom_Transmit(PduIdType Id , const PduInfoType*PduInfoPtr)
接收: void LdCom_RxIndication (PduIdType RxPduId , const PduInfoType* PduInfoPtr )
发送容易实现,接收要自己配置通往RTE的回调函数。名字自定义。
回调函数的定义 是 需要自己写的,这个要清楚。即使不写,编译也编不过去。
反思:
1、TcpIp和SoAd 需要反复调试练习,尤其SOAD的配置,比较灵活,需要勤加练习。
2、SOMEIP、SD的调试要不要Preevision 工具 ,只有CANOE能不能验证???
3、SOMEIP、DOIP还没搞,后续可以研究一下。