PyTorch-05神经网络与全连接(Logistic Regression、交叉熵、交叉熵来优化一个多分类的问题、全连接层(MLP网络层)、激活函数与GPU加速、测试、Visdom可视化)
PyTorch-05神经网络与全连接(Logistic Regression逻辑回归、交叉熵、交叉熵来优化一个多分类的问题、全连接层(MLP网络层)、激活函数与GPU加速、测试(validation performance)、Visdom可视化)
一、Logistic Regression逻辑回归
Logistic Regression现在完全被classification分类的相关概念给代替掉了。
这里先回顾一下linear regression
linear regression是一个非常简单的线性模型 y = xw + b 。其中输入是x,网络参数w和b,输出值是一个连续的y值。因为输出y是连续型的,所以称其为regression。

如何将这个regression转为classification呢?
这里我们添加一个激活函数σ,即 y = σ(xw + b)。其中σ:sigmoid or logistic。

通过sigmoid函数后会将连续型的y值,压缩至[0,1]这个区间,即概率值(如果这个概率P越接近0,则输出为0表示不是;如果这个概率P越接近1,则输出为1表示是)。因此这样就可以理解为是一个classification的问题。
二分类 Binary Classification
就是通过sigmoid函数将输出值y压缩至0到1这个区间范围内再输出。输出结果越接近0,则分类为0;如果输入结果越接近1,则分类为1。
经过σ处理的过程就是logistic function。
分类与回归的区别:目标Goal v.s. 方法Approach
对于回归类型:
目标:预测值 = 真实值
方法:minimize dist 最小距离,即预测值Pred与真实值y的差距。这个差距是用范数来表示,可以使用2范数的平方 || pred - y ||₂ ² 来表示。 2范数为:|| pred - y ||₂ 2范数是要开根号的,所以mse就是对2范数增加一个平方以抵消开的根号。
对于分类类型:
目标:使得准确性accuracy很高,最大化的基准maximize benchmark。
分类型并不直接优化accuracy。(accuracy可以理解为有五个数字,预测对了3个,accuracy=3\5)
方法1:minimize dist 最小距离,只不过这里的预测值是(|)和真实值r(|)的最小距离,使得=r,这里的x是相同的。
方法2: minimize divergence 最小分歧,预测值是(|)和真实值r(|)的差别最小。
Q1. why not maximize accuracy? 为什么不是求得最大准确度?为什么不能使用accuracy做训练?
accuracy = ∑ (==) / () = 预测对的数量 / 总的数量
比如:二分问题,有5个数字,预测对了3个,accuracy = 3 / 5 = 60%
这里要讨论两种情况:
由于accuracy会存在以下两种情况,所以accuracy不用做训练比较好。
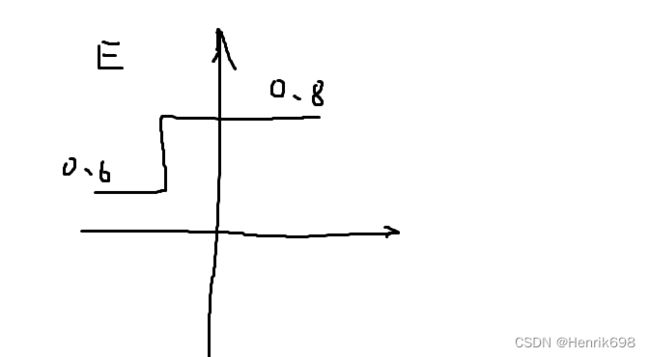
**情况1、**比如预测第三个数字时,预测错了,本来预测的是0.4,这样由于2分类情况,0.4没有大于0.5,所有预测为0;但是实际情况是1。通过调节w权值,使得预测的0.4变成了0.45,这个概率probability增加了0.05,更加靠近真实值1了。但是,因为没有大于0.5这个二分类阈值,使得没有发生本质变化,所以accuracy没有变化。因此这就会产生一种情况,w权值在改变,但是我们的accuracy没有变化,所以∂acc / ∂w为0,即梯度gradient = 0。
**情况2、**比如预测第三个数字时,预测的概率为0.499,当w权值改变一点点时,预测由0.499变为了0.501。这使得概率大于了0.5二分类的阈值。所以原本是预测错的0,因为w的变化非常小,从而就使得预测正确了1。使得我们的accuracy从之前的预测对了3个,变成了预测对了4个。使得accuracy = 4 / 5 = 80%。由于w权值只增加了很小的数,比如0.001,但是accuracy从60%变到80%,增加了20%。这样0.2 / 0.001 会得到一个非常大的值,使得梯度gradient不在连续或者梯度很大,使得梯度爆炸的情况产生。如下图
Q2. why call logistic regression?为什么叫逻辑回归
logistic 是因为使用sigmoid函数作为激活函数。
regression 这个是有一定争议的:(这里我们不必过多浪费时间考虑这个,因为logistic regression目前基本用不到了)
▪ MSE => regression
如果MSE作为loss的时候,(预测值-真实值)^2我们希望预测值越接近真实值越好,probability概率是一个连续的,所以会有regression的情况。
▪ Cross Entropy => classification
如果使用cross entropy交叉熵损失函数这种作为loss,我们可以理解为是一个classification的问题。
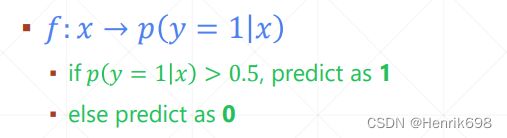
Binary Classification 二分类
概率大于0.5预测为1,小于0.5预测为0。
如果损失函数是minimize MSE均方误差,我们可以理解为是regression问题。
Multi-class classification 多分类
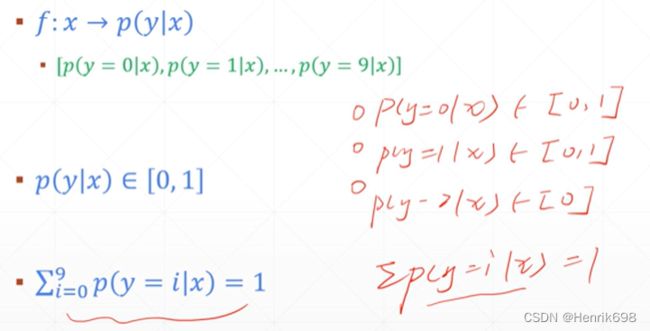
对于多分类有一个约束条件,就是所有分类概率之和为1。
对于这个约束我们应该如何生成呢?
使用Softmax函数:这个函数可以满足上面多分类的约束条件。
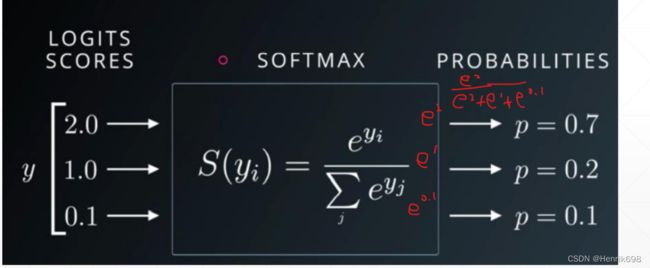
这个函数输出的所有概率之和为1,这个softmax函数还有一个重要特点,就是会将原来输入较大的通过函数输出后会放的更大,而原来较小的则会压缩到较为密集的空间,这样会使得原来最大与最小值之间的差价通过该函数而扩大(输入中2/1=1,输出概率中0.7/0.2=3.5,这个明显扩大了)。
二、交叉熵
损失函数 Loss for classification
▪ MSE
▪ Cross Entropy Loss
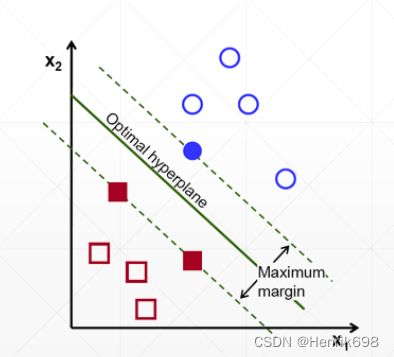
▪ Hinge Loss 在svm中使用比较多,会惩罚margin,margin小于1就会惩罚margin。
熵 Entropy
▪ Uncertainty 不确定性,不稳定性
熵越大越稳定。
▪ measure of surprise 惊喜的度量
▪ higher entropy = less info.
Entropy是衡量p一个分布的其本身的稳定度:
例子:中彩票 Lottery
import torch
from torch.nn import functional as F
#中奖概率是相等的
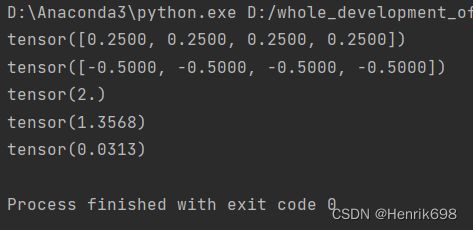
a = torch.full([4],1/4)
print(a)
#分布的entropy
#p乘以以2为底的log的1/p
print(a*torch.log2(a))
#获得熵,熵越大越稳定,说明没有惊喜度
print(-(a*torch.log2(a)).sum())
#另一组中奖概率,有一个概率比其他的高
b = torch.tensor([0.1,0.1,0.1,0.7])
#获得熵,熵有所下降,说明有惊喜
print(-(b*torch.log2(b)).sum())
#另一组极端中奖情况,有一个概率比其他高的多
c = torch.tensor([0.001,0.001,0.001,0.999])
#熵非常低,意味着会非常惊喜
print(-(c*torch.log2(c)).sum())
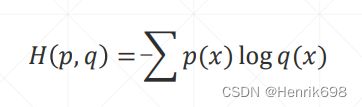
交叉熵 Cross Entropy
交叉熵Cross Entropy是衡量两个分布p和q的不稳定度:
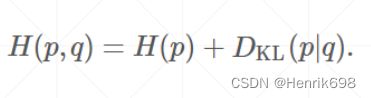
上面的式子展开:
H§ + KL Divergence散度 (Kullback-Leibler divergence越小p和q重合区域越多,p和q越接近。)
关于散度,下图两个Gaussian distribution的曲线,左图曲线重合区域比较小(阴影部分),假设Dkl = 2。右图两个高斯分布曲线相互重合,则Dkl ≈ 0。
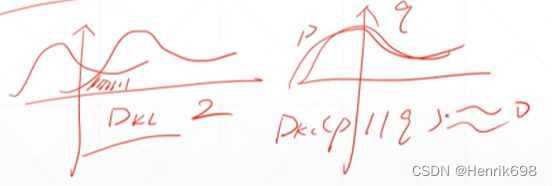
p分布非常不稳定,则熵接近于0,熵接近0说明是不稳定的情况;
p分布与q分布相互重合,则Dkl接近于0,Dkl接近0说明两个分布接近于0。
特殊情况:
当P = Q的时候
交叉熵公式:
H(p,q) = H§ + Dkl(p|q)
Dkl(p|q) ≈ 0
所以 H(p,q) = H§
即 交叉熵 = 熵
当对于one-hot encoding独热编码的时候
[0, 0, 0, 1, 0]
将1带入熵的公式中,-1log1
log1 = 0
所以H§的Entropy = 0
所以H(p,q) = Dkl(p|q)
cross entropy 对于0和1分布独热编码进行衡量的指标就是KL divergence。
KL divergence就说明:如果 cross entropy接近0,KL divergence就接近于0。间接的Dkl为0,按照上面的那种情况,则H(p,q) = H§。就说明p和q的分布就越来越接近。
q(y|x) 预测 与 p(y|x)真实 的Dkl接近于0,p与q就越接近。
Binary Classification对于二分类的问题,cross entropy应该如何运算:
H(P,Q) = - ∑ P(i)logQ(i) i=(cat,dog)
H(P,Q) = - P(cat)logQ(cat) - P(dog)logQ(dog)
由于是二分类,P(dog) = (1 - P(cat))
H(P,Q) = - P(cat)logQ(cat) - (1 - P(cat))log(1 - Q(cat))
P(cat)为真实值y,Q(cat)为神经网络预测概率p
H(P,Q) = - (ylog§ + (1 - y)log(1 - p))
当y = 1时,H(P,Q) = -ylog§,需要最小值-ylog§,即最大化log§,最大化p = p(y=1|x);
当y = 0时,H(P,Q) = -log(1 - p),需要最小值-log(1 - p),即最大化log(1 - p),最小化p = p(y=0|x)
for example例子:

P1 = [ 1, 0, 0, 0, 0 ]为真实概率分布情况;
Q1 = [ 0.4, 0.3, 0.05, 0.05, 0.2]为神经网络输出的概率分布情况。
cross entropy为:H(P1,Q1) = -(1log0.4 + 0log0.3 + 0log0.05 + 0log0.05 + 0log0.2) = -log0.4 ≈ 0.916
我们想要的预测情况:Q1 = [ 0.98, 0.01, 0, 0, 0.01 ]
cross entropy为:H(P1,Q1) = -∑ P1(i)logQ1(i) = -(1log0.98 + 0log0.01 + 0log0 + 0log0 + 0log0.01) = -log0.98 ≈ 0.02
可以发现cross entropy从原来的0.916下降到0.02,说明预测值Q1越来越接近真实值P1。

why not use MSE? 对于分类问题,为什么不使用MSE,而是用cross entropy
▪ sigmoid和MSE搭配使用很容易出现sigmoid饱和的情况,即梯度离散(gradient vanish梯度消失),这样串联起来会非常困难。
▪ cross entropy的梯度信息更大,收敛的更快,MSE相对收敛要慢一些converge slower
▪ 但是有些时候并不绝对,在做一些前沿算法的东西时(比如:meta-learning),cross entropy如果不行,最好试一下MSE,因为MSE的导数非常简单,即(p-y)^2’ = 2(p-y)。
数值稳定性Numerical Stability(cross entropy小案例)
import torch
from torch.nn import functional as F
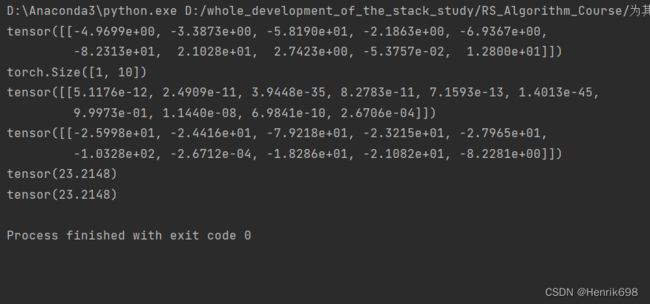
x = torch.randn(1,784)
w = torch.randn(10,784)
logits = x@w.t()
print(logits)
print(logits.shape)
pred = F.softmax(logits,dim=1)
print(pred)
pred_log = torch.log(pred)
print(pred_log)
#pytorch中cross entropy是将log与softmax打包到一起了,所以如果使用cross_entropy参数就必须使用logits。
#如果传入了predic的话,predict已经经过softmax了,出入cross_entropy中又会经过一遍softmax,会使得结果非常小。
#cross_entropy这个函数 = softmax这个操作 + log操作 + nll_loss操作
a=F.cross_entropy(logits,torch.tensor([3]))
print(a)
#如果一定要自己计算,就需要传入pred经过log处理过后的
b=F.nll_loss(pred_log,torch.tensor([3]))
print(b)
三、交叉熵来优化一个多分类的问题
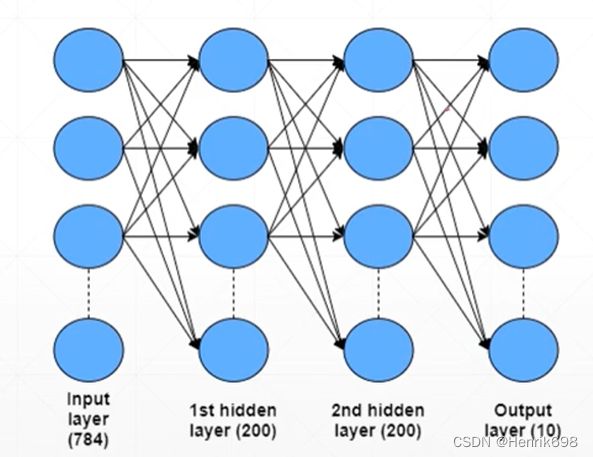
有10层,代表有10分类:
由于还没有讲解线性层,所以这里使用一些底层的操作,方便大家对pytorch梯度计算的过程有一个非常深刻的认识。
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torchvision import datasets, transforms
#3、定义一个优化器
#这个优化器优化的目标是三组全连接层的变量[w1, b1, w2, b2, w3, b3]
batch_size=200
learning_rate=0.01
epochs=10
#加载数据
train_loader = torch.utils.data.DataLoader(
datasets.MNIST('../data', train=True, download=True,
transform=transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))
])),
batch_size=batch_size, shuffle=True)
test_loader = torch.utils.data.DataLoader(
datasets.MNIST('../data', train=False, transform=transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))
])),
batch_size=batch_size, shuffle=True)
#1、完成网络tensor的定义:
#新建立三个线性层,每个线性层都有w(tensor)和b(tensor):
#首先参数1为输出维度200。
#参数2为输入维度784=28*28,可以理解为从784降维到200的过程。
#参数3必须要指定requires_grad否则会报错。
w1, b1 = torch.randn(200, 784, requires_grad=True),\
torch.zeros(200, requires_grad=True)
w2, b2 = torch.randn(200, 200, requires_grad=True),\
torch.zeros(200, requires_grad=True)
w3, b3 = torch.randn(10, 200, requires_grad=True),\
torch.zeros(10, requires_grad=True)
#何同学的初始化点
#初始化很重要,如果没有这个初始化,则该运算结果会程序梯度离散的问题,loss会一致保持不变
torch.nn.init.kaiming_normal_(w1)
torch.nn.init.kaiming_normal_(w2)
torch.nn.init.kaiming_normal_(w3)
#2、完成网络forward的过程:
def forward(x):
x = x@w1.t() + b1 #这里b1会完成一个boardcasting的操作
x = F.relu(x) #激活函数使用relu()
x = x@w2.t() + b2
x = F.relu(x)
x = x@w3.t() + b3
x = F.relu(x)
# 这里的x就是logits,即没有经过sigmoid,也没有经过softmax的东西叫做logits。
# 一般来说,这里最后一层的relu()应该是不许用的,只要不使用softmax和sigmoid函数就行。
return x
optimizer = optim.SGD([w1, b1, w2, b2, w3, b3], lr=learning_rate)
criteon = nn.CrossEntropyLoss()
for epoch in range(epochs):
for batch_idx, (data, target) in enumerate(train_loader):
data = data.view(-1, 28*28)
logits = forward(data)
loss = criteon(logits, target)
optimizer.zero_grad()
loss.backward()
# print(w1.grad.norm(), w2.grad.norm())
optimizer.step()
if batch_idx % 100 == 0:
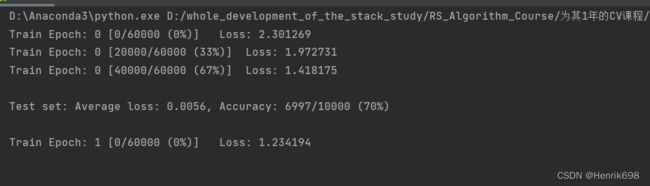
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
epoch, batch_idx * len(data), len(train_loader.dataset),
100. * batch_idx / len(train_loader), loss.item()))
test_loss = 0
correct = 0
for data, target in test_loader:
data = data.view(-1, 28 * 28)
logits = forward(data)
test_loss += criteon(logits, target).item()
pred = logits.data.max(1)[1]
correct += pred.eq(target.data).sum()
test_loss /= len(test_loader.dataset)
print('\nTest set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format(
test_loss, correct, len(test_loader.dataset),
100. * correct / len(test_loader.dataset)))

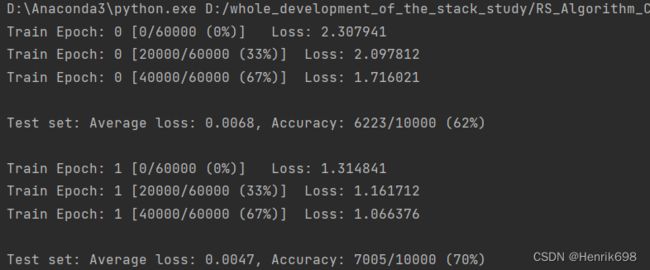
可以发现loss下降了。
四、全连接层(MLP网络层)
实践Be practical:
直接写一个三层的全连接层:
这里的layer三层是分开写的:
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torchvision import datasets, transforms
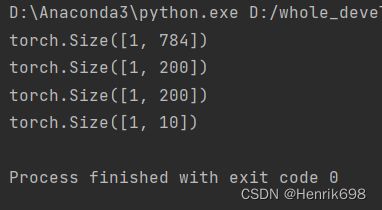
x = torch.rand(1,784)
# print(x)
print(x.shape)
layer1 = nn.Linear(784,200)
layer2 = nn.Linear(200,200)
layer3 = nn.Linear(200,10)
x = layer1(x) #降维过程[1,784]->[1,200]
x = F.relu(x,inplace=True) #激活函数relu
print(x.shape)
x = layer2(x) #特征提取过程[1.200]->[1,200],没有降维过程所以维度不变。
x = F.relu(x,inplace=True) #激活函数relu
print(x.shape)
x = layer3(x) #输出层,会从[1,200]->降维到[1,10]
x = F.relu(x,inplace=True) #激活函数relu
print(x.shape)
pytorch中的两种接口的API(nn.ReLU v.s. F.relu())
▪ class-style API
类风格的API,都存在nn中,即nn.ReLU;风格是名字大写。
x1=torch.rand([1,10])
print(x1.shape)
x2 = x1
layer = nn.ReLU() #实例化
y2 = layer(x2)
print(y2)

▪ function-style API
函数型API,可以很好管理中间运算过程,只是使用了GPU加速的这个功能。F.relu F.cross-entropy
x1=torch.rand([1,10])
print(x1.shape)
y1 = F.relu(x1, inplace=True)
print(y1)

创建一个模型类
实际上我们自己能够实现一个nn.Module的话,将三层创建到一起,会使得类的封装性变得更强。这个类就代表着网络结构,可以其一个对应的名字。
如果要创建自己的网络结构的话:
▪ inherit from nn.Module这个网络结构要继承自nn.Module;nn.Module会带来许多方便性。
▪ init layer in init 实现初始化函数,并带上必要的参数。
▪ implement forward() 需要实现forward,不需要实现backward,backward是nn.Module会自动提供的,向后求导的过程也不需要额外去写公式告诉pytorch如何向后求导,pytorch autograd的包会自动完成向后求导的功能,写好向前的功能之后,会自动记录向前传播的过程,然后使用自动求导的工具,要自动完成当前继承图的向后传播的过程。
如果要新建一个自己的层:
这里的layer三层是组合在class类中的
#类名(继承nn.Module)
class MLP(nn.Module):
#初始化方法,需要带一些自己的参数就可以,不需要给nn.Module传参数,不需要带参数也是可以的。
def __init__(self):
super(MLP,self).__init__()
#这里不需要带参数,因为已经给好维度了[784,200]。
#如果要给参数,注意一定要上下相互能配合的上。
self.model = nn.Sequential(
nn.Linear(784,200),
nn.ReLU(inplace=True),
nn.Linear(200,200),
nn.ReLU(inplace=True),
nn.Linear(200,10),
nn.ReLU(inplace=True),
)
def forward(self,x):
x = self.model(x) #这句话使用了module.forward函数。
return x
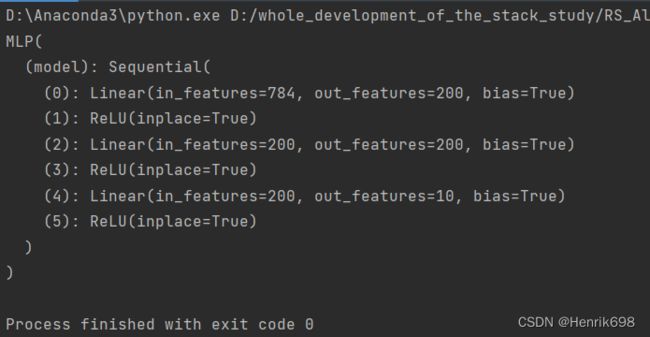
a = MLP()
print(a)
完整的引用自己创建class类模型的实例:
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torchvision import datasets, transforms
batch_size=200
learning_rate=0.01
epochs=10
#加载数据
train_loader = torch.utils.data.DataLoader(
datasets.MNIST('../data', train=True, download=True,
transform=transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))
])),
batch_size=batch_size, shuffle=True)
test_loader = torch.utils.data.DataLoader(
datasets.MNIST('../data', train=False, transform=transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))
])),
batch_size=batch_size, shuffle=True)
#类名(继承nn.Module)
#使用nn接口会有一套它自己的初始化方法。
class MLP(nn.Module):
#初始化方法,需要带一些自己的参数就可以,不需要给nn.Module传参数,不需要带参数也是可以的。
def __init__(self):
super(MLP, self).__init__()
# 这里不需要带参数,因为已经给好维度了[784,200]。
# 如果要给参数,注意一定要上下相互能配合的上。
self.model = nn.Sequential(
nn.Linear(784, 200),
nn.ReLU(inplace=True),
nn.Linear(200, 200),
nn.ReLU(inplace=True),
nn.Linear(200, 10),
nn.ReLU(inplace=True),
)
def forward(self, x):
x = self.model(x) #这句话使用了module.forward函数。
return x
net = MLP()
#优化器
#参数net.parameters(),直接继承nn,可以方便管理[w1, b1, w2, b2, w3, b3...],不需要自己来管理了。
optimizer = optim.SGD(net.parameters(), lr=learning_rate)
criteon = nn.CrossEntropyLoss()
for epoch in range(epochs):
for batch_idx, (data, target) in enumerate(train_loader):
data = data.view(-1, 28*28)
logits = net(data)
loss = criteon(logits, target)
#这三个函数的作用是先将梯度归零(optimizer.zero_grad()),然后反向传播计算得到每个参数的梯度值(loss.backward()),最后通过梯度下降执行一步参数更新(optimizer.step())
optimizer.zero_grad() #先将梯度归零
loss.backward()
# print(w1.grad.norm(), w2.grad.norm())
optimizer.step()
if batch_idx % 100 == 0:
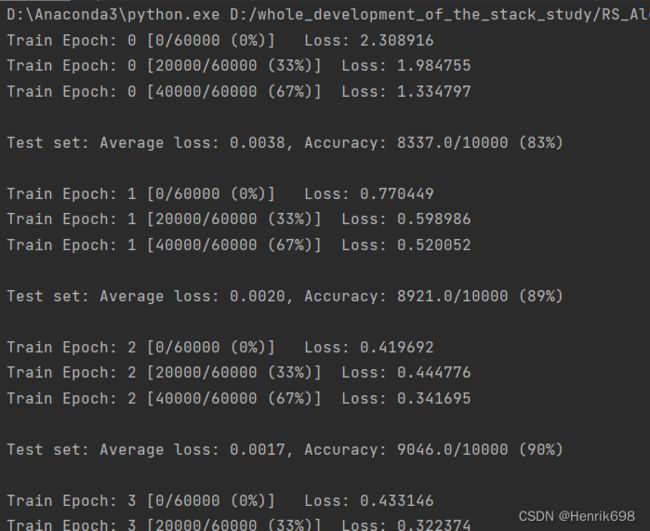
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
epoch, batch_idx * len(data), len(train_loader.dataset),
100. * batch_idx / len(train_loader), loss.item()))
test_loss = 0
correct = 0
for data, target in test_loader:
data = data.view(-1, 28 * 28)
logits = net(data)
test_loss += criteon(logits, target).item()
pred = logits.data.max(1)[1]
correct += pred.eq(target.data).sum()
test_loss /= len(test_loader.dataset)
print('\nTest set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format(
test_loss, correct, len(test_loader.dataset),
100. * correct / len(test_loader.dataset)))
五、激活函数与GPU加速
激活函数:
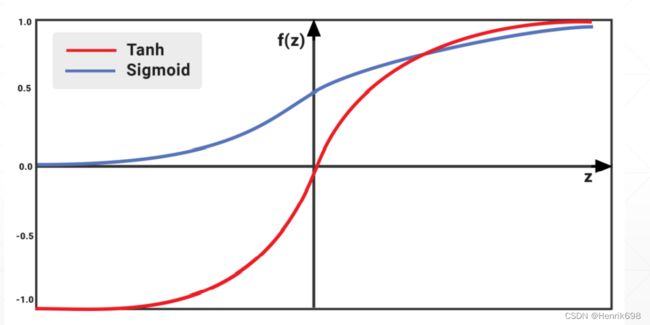
sigmoid函数 和 Tanh函数
蓝色的是sigmoid函数,范围是0到1,sigmoid存在一个问题,就是梯度离散,当w在左侧的时候梯度接近于0,当w在右侧的时候梯度接近于0,因此现在不适用sigmoid函数。
Tanh函数是经过sigmoid函数缩放平移后的函数,区间是-1到1。Tanh函数也会存在梯度离散,但是Tanh函数在RNN循环神经网络中会用的多一些。
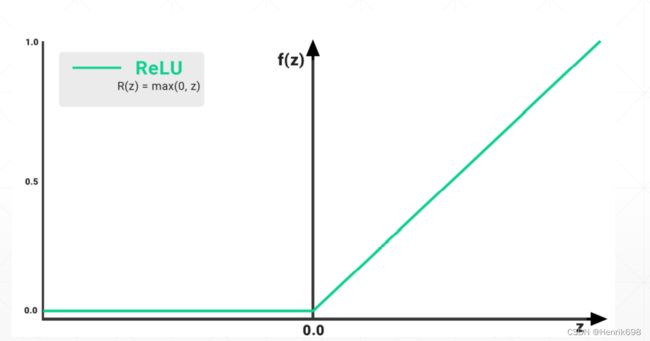
ReLU函数
ReLU函数更简单,当阈值小于某一个值的时候,这里阈值时0,就不响应,当x>0的时候,输出值就是y=x。从数学上来说ReLU函数在x=0处不连续,但不影响,一般来说我们对于x=0这个点的梯度理解为0或者理解为1。
ReLU函数解决了sigmoid函数梯度离散的现象。ReLU函数对于x>1的时候,∂y/∂x = 1,这个是非常有利于串型的传播,即没有对原来的梯度进行放大或减小,就不会出现梯度离散或者梯度爆炸的情况。
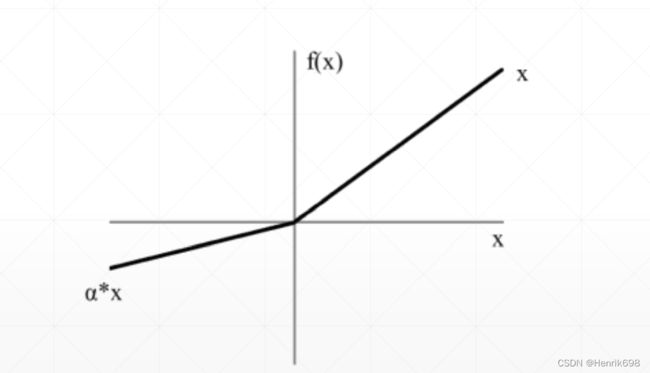
Leaky ReLU函数
Leaky ReLU函数,x<0,y = αx 这个α斜率在pytorch可以设置。避免当x<0,梯度信息全部为0了,让其在x<0这个区间能够得到较小的梯度,也能返回到搜索的最优解,避免x<0的梯度信息全部为0,使得搜索卡在原地不动了。
Leaky ReLU函数pytorch中的使用:
import torch
import torch.nn as nn
a = torch.rand(1,10)
print(a.shape)
layer = nn.LeakyReLU()
res = layer(a)
print(res)

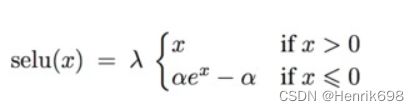
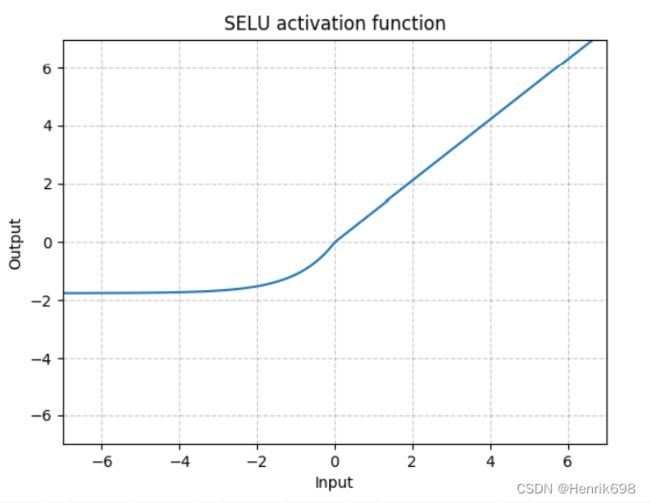
SELU函数
ReLU函数在x = 0处数学上是不连续的。一种更加光滑的曲线SELU函数。
SELU函数是两个函数的concat组合,x>0的部分是ReLU函数,x<0的部分是指数函数。
目前SELU函数用到的比较少,Leaky ReLU还是有些需要用到的:

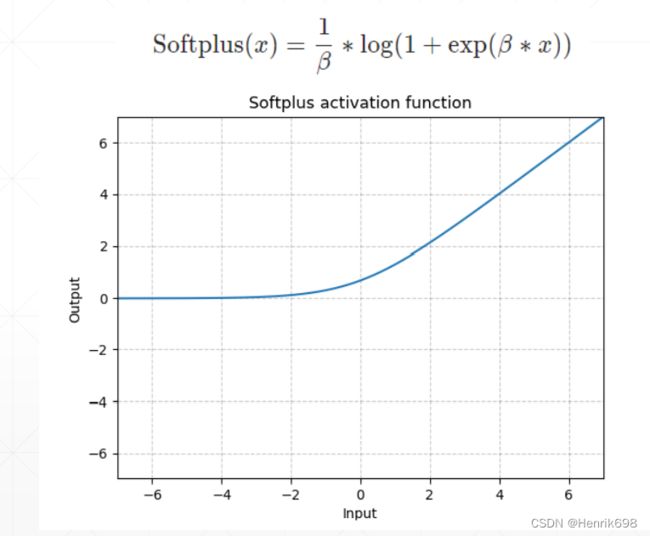
softplus 函数
使得x=0处梯度也能均匀变化的过程,是ReLU函数平滑的一个版本,x=0附加不在是不连续的了。softplus函数使用比较少。
GPU加速
下面代码只是简单告诉如何设置GPU加速:
device = torch.device('cuda:0') #这里的0表示cuda的编号,如果有8张显卡,就可以是0~7这样的编号。
net = MLP().to(device) #.to(device)就可以将模块搬到GPU或CPU上面去。
optimizer = optim.SGD(net.parameters(), lr = learning_rate)
criteon = nn.CrossEntropyLoss().to(device) #loss层也是可以搬上去的
for epoch in range(epochs):
for batch_idx, (data, target) in enumerate(train_loader):
data = data.view(-1,28*28)
data, target = data.to(device), target.cuda() #注意data也要搬运,.to(device)是0.4或1.0版本推荐的方法,而.cuda()是以前0.3版本的方法不推荐,不好控制。
#这里需要注意:对于模块的net = MLP().to(device),当device改变时,该模块也会原地更新到新的device上,原来的会消失。而对于tensor,data.to(device),这里当device改变时,会在新的device上产生一个tensor,并且原来的tensor不消失,即CPU和GPU上都有该tensor。
实例代码:
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torchvision import datasets, transforms
batch_size=200
learning_rate=0.01
epochs=10
train_loader = torch.utils.data.DataLoader(
datasets.MNIST('../data', train=True, download=True,
transform=transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))
])),
batch_size=batch_size, shuffle=True)
test_loader = torch.utils.data.DataLoader(
datasets.MNIST('../data', train=False, transform=transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))
])),
batch_size=batch_size, shuffle=True)
class MLP(nn.Module):
def __init__(self):
super(MLP, self).__init__()
self.model = nn.Sequential(
nn.Linear(784, 200),
nn.LeakyReLU(inplace=True),
nn.Linear(200, 200),
nn.LeakyReLU(inplace=True),
nn.Linear(200, 10),
nn.LeakyReLU(inplace=True),
)
def forward(self, x):
x = self.model(x)
return x
device = torch.device('cuda:0')
net = MLP().to(device)
optimizer = optim.SGD(net.parameters(), lr=learning_rate)
criteon = nn.CrossEntropyLoss().to(device)
for epoch in range(epochs):
for batch_idx, (data, target) in enumerate(train_loader):
data = data.view(-1, 28*28)
data, target = data.to(device), target.cuda()
logits = net(data)
loss = criteon(logits, target)
optimizer.zero_grad()
loss.backward()
# print(w1.grad.norm(), w2.grad.norm())
optimizer.step()
if batch_idx % 100 == 0:
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
epoch, batch_idx * len(data), len(train_loader.dataset),
100. * batch_idx / len(train_loader), loss.item()))
test_loss = 0
correct = 0
for data, target in test_loader:
data = data.view(-1, 28 * 28)
data, target = data.to(device), target.cuda()
logits = net(data)
test_loss += criteon(logits, target).item()
pred = logits.data.max(1)[1]
correct += pred.eq(target.data).sum()
test_loss /= len(test_loader.dataset)
print('\nTest set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format(
test_loss, correct, len(test_loader.dataset),
100. * correct / len(test_loader.dataset)))
当代码运行时:
GPU利用率明显提高了:

六、测试(validation performance)
deep learning并不是越train训练越好,会存在over fitting过拟合的情况。数据量以及架构是训练的核心问题。
下图中的test是通过validation test来做的。黄色线的accuracy在后面不在上升,而且在loss中黄色线后面波动的很厉害。

比较预测结果与真实值的准确性accuracy(即预测正确的数量占比)
这里使用argmax方法,argmax返回的是最大数的索引.argmax有一个参数axis,默认是0,表示第几维的最大值。
import torch
from torch.nn import functional as F
logits = torch.rand(4,10)
# print(logits)
pred = F.softmax(logits,dim=1) #对每一行进行softmax
# print(pred)
print(pred.shape)
# pred2 = F.softmax(logits,dim=0) #对每一列进行softmax
# print(pred2)
pred_label = pred.argmax(dim = 1) #argmax()取出a中元素最大值所对应的索引
print(pred_label)
logits_label = logits.argmax(dim=1)
print(logits_label)
#真实的label
true_label = torch.tensor([9,3,2,4])
correct = torch.eq(pred_label,true_label)
print(correct)
print(correct.sum().float())
print(correct.sum().float().item()/4) #.item()是取出数值

when to test 什么时候应该计算test performance(或称为validation performance)
首先不能每做完一个batch就做一次test performance,会花费大量时间做test,这样时不太合理的,尤其是一些大型数据集,会花费大量时间。
基本上,每完成一些batch后做一次test performance。
或则,每完成一些epoch后做一次test performace。
一个计算accuracy的代码示例:
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torchvision import datasets, transforms
batch_size=200
learning_rate=0.01
epochs=10
train_loader = torch.utils.data.DataLoader(
datasets.MNIST('../data', train=True, download=True,
transform=transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))
])),
batch_size=batch_size, shuffle=True)
test_loader = torch.utils.data.DataLoader(
datasets.MNIST('../data', train=False, transform=transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))
])),
batch_size=batch_size, shuffle=True)
class MLP(nn.Module):
def __init__(self):
super(MLP, self).__init__()
self.model = nn.Sequential(
nn.Linear(784, 200),
nn.LeakyReLU(inplace=True),
nn.Linear(200, 200),
nn.LeakyReLU(inplace=True),
nn.Linear(200, 10),
nn.LeakyReLU(inplace=True),
)
def forward(self, x):
x = self.model(x)
return x
device = torch.device('cuda:0')
net = MLP().to(device)
optimizer = optim.SGD(net.parameters(), lr=learning_rate)
criteon = nn.CrossEntropyLoss().to(device)
for epoch in range(epochs):
for batch_idx, (data, target) in enumerate(train_loader):
data = data.view(-1, 28*28)
data, target = data.to(device), target.cuda()
logits = net(data)
loss = criteon(logits, target)
optimizer.zero_grad()
loss.backward()
# print(w1.grad.norm(), w2.grad.norm())
optimizer.step()
if batch_idx % 100 == 0:
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
epoch, batch_idx * len(data), len(train_loader.dataset),
100. * batch_idx / len(train_loader), loss.item()))
test_loss = 0
correct = 0
for data, target in test_loader:
data = data.view(-1, 28 * 28)
data, target = data.to(device), target.cuda()
logits = net(data)
test_loss += criteon(logits, target).item()
pred = logits.argmax(dim=1)
correct += pred.eq(target).float().sum().item()
test_loss /= len(test_loader.dataset)
print('\nTest set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format(
test_loss, correct, len(test_loader.dataset),
100. * correct / len(test_loader.dataset)))
七、Visdom可视化,检测数据动态变化
有利于调试,找到问题所在的可视化工具:Visdom可视化
TensorBoardX
实时变量的曲线,查看模型的架构,查看二维照片,降维可视化的过程。

TensorboardX在pytorch中的使用:
注意:tensorboard抽取的是一个numpy的数据,如果跟tensor直接进行match的话,必须将tensor转换到cpu()上面,然后.numpy()转成numpy数据,才能赋值给tensorboard进行可视化。
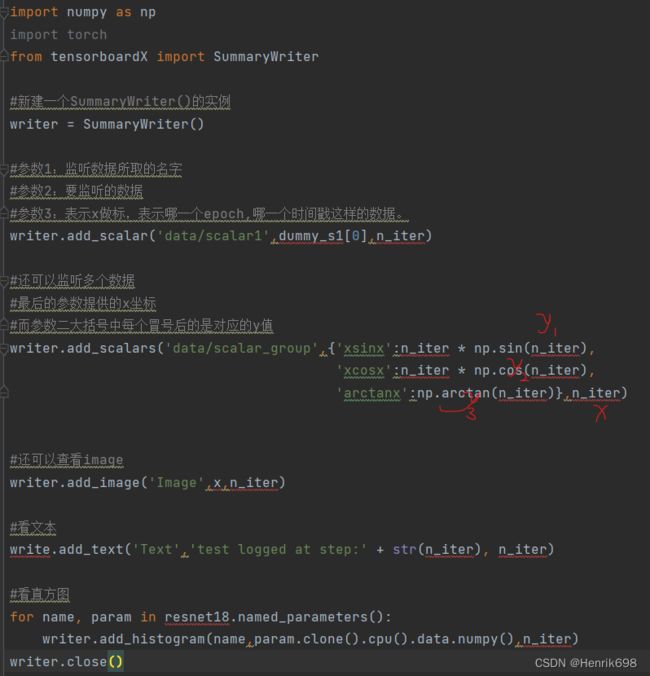
import numpy as np
import torch
from tensorboardX import SummaryWriter
#新建一个SummaryWriter()的实例
writer = SummaryWriter()
#参数1:监听数据所取的名字
#参数2:要监听的数据
#参数3:表示x做标,表示哪一个epoch,哪一个时间戳这样的数据。
writer.add_scalar('data/scalar1',dummy_s1[0],n_iter)
#还可以监听多个数据
#最后的参数提供的x坐标
#而参数二大括号中每个冒号后的是对应的y值
writer.add_scalars('data/scalar_group',{'xsinx':n_iter * np.sin(n_iter),
'xcosx':n_iter * np.cos(n_iter),
'arctanx':np.arctan(n_iter)},n_iter)
#还可以查看image
writer.add_image('Image',x,n_iter)
#看文本
write.add_text('Text','test logged at step:' + str(n_iter), n_iter)
#看直方图
for name, param in resnet18.named_parameters():
#注意:tensorboard抽取的是一个numpy的数据,如果跟tensor直接进行match的话,必须将tensor转换到cpu()上面,然后.numpy()转成numpy数据,才能赋值给tensorboard进行可视化。
writer.add_histogram(name,param.clone().cpu().data.numpy(),n_iter)
writer.close()
Visdom from Facebook
Visdom与tensorboard完成的风格是不同的,Visdom可以原生的接受tensor。

Step 1. install
pip install visdom -i http://pypi.douban.com/simple/ --trusted-host pypi.douban.com
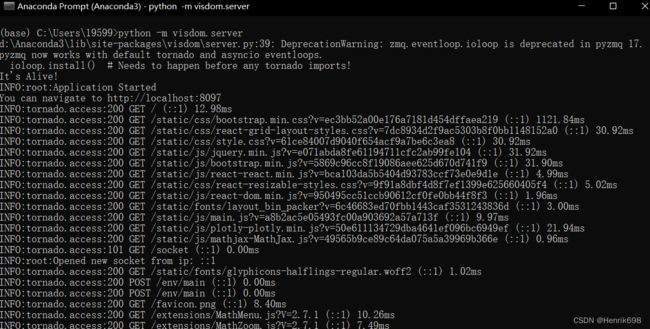
Step 2. run server damon
开启监听功能,Visdom实际上是一个web服务器, 开启web服务器以后,向这个服务器丢数据,之后就会 将这些数据渲染出来到网页上面。确保在运行程序之前开启了Visdom的服务器。
visdom提供绘制线 lines:single trace 单一追踪
from visdom import Visdom
#绘制一条曲线
viz = Visdom() #创建一个实例
#创建一条直线,再把最新数据添加到这条直线上面。
#第一步:先创建一条直线
#参数1:y
#参数2:x
#参数3:win表示这个直线的唯一标识符,即id
#在visdom中还有一个是工程的id,每个工程包含许多win,这个参数叫做environment,如果environment不指定,则env='main',即默认的大环境。
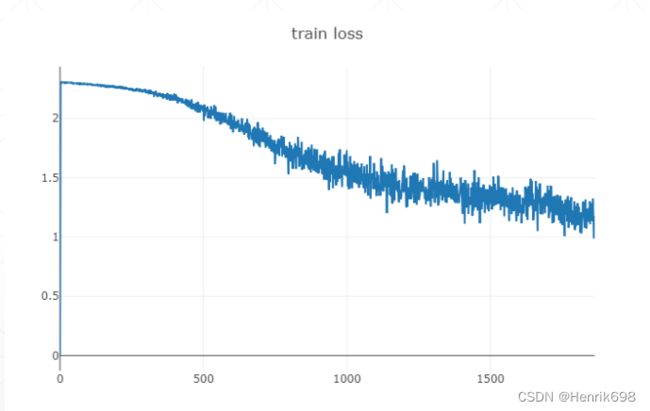
#参数4:是这个窗体的额外信息,比如title命名为‘train loss’
viz.line([0.],[0.],win = 'train_loss', opts=dict(title = 'train loss'))
#第二步:将数据逐步的添加进来。
#参数1:对于非image数据的话,传入的还是numpy类型。
#参数update:这里一定要指定为‘append’,是逐步添加到图上并且不覆盖原先添加的,如果不写这个参数,则会覆盖原来的数据。
viz.line([loss.item()],[global_step],win = 'train_loss',update='append')
这个刷新率是非常快的,每1秒返回一次。不像Tensorboard每30秒刷新一次。
visdom提供绘制线 lines: multi-traces 多追踪
我们可能会同时查看train loss 和 test loss 就需要multi-traces。
from visdom import Visdom
#绘制多条曲线
viz = Visdom() #创建一个实例
#参数1:[y1,y2]需要同时传入两个数值。
#参数2:x
#参数3:win窗体的唯一标识符
#参数4:是这个窗体的额外信息,legend是list,表示y1和y2的图标。
viz.line([[0.0,0.0]],[0.],win = 'test',
opts = dict(title='test loss&acc.',legend = ['loss','acc.']))
#参数1:[test loss, accuracy]
#参数update:这里一定要指定为‘append’。
viz.line([[test_loss, correct/len(test_loader.dataset)]],
[global_step],win = 'test',update='append')

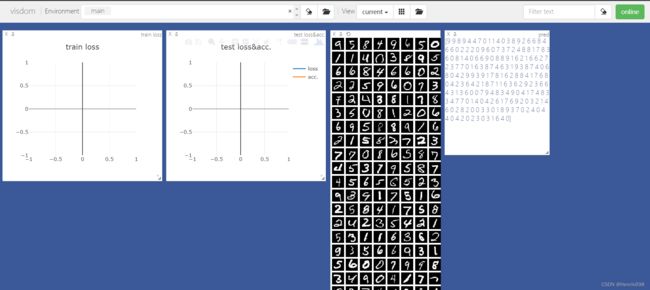
visdom提供的可视化功能 visual X
from visdom import Visdom
#可视化功能
viz = Visdom() #创建一个实例
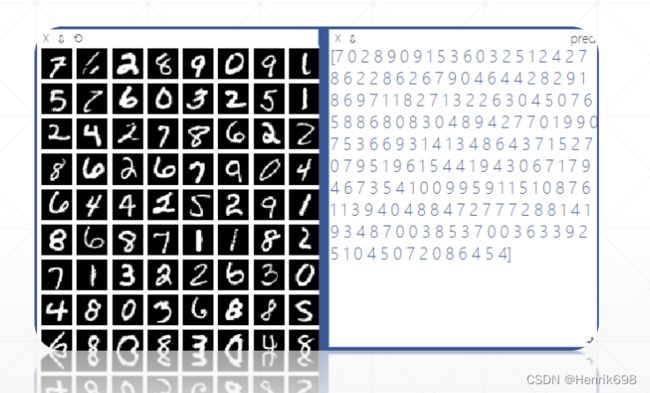
#data是一个image,其shape是[b,1,28,28]这样一个tensor,不需要转成numpy数据
viz.images(data.view(-1,1,28,28),win = 'x')
viz.text(str(pred.detach().cpu().numpy()),win='pred',opts=dict(title = 'pred'))
实例程序:
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torchvision import datasets, transforms
from visdom import Visdom
batch_size=200
learning_rate=0.01
epochs=10
train_loader = torch.utils.data.DataLoader(
datasets.MNIST('../data', train=True, download=True,
transform=transforms.Compose([
transforms.ToTensor(),
# transforms.Normalize((0.1307,), (0.3081,))
])),
batch_size=batch_size, shuffle=True)
test_loader = torch.utils.data.DataLoader(
datasets.MNIST('../data', train=False, transform=transforms.Compose([
transforms.ToTensor(),
# transforms.Normalize((0.1307,), (0.3081,))
])),
batch_size=batch_size, shuffle=True)
class MLP(nn.Module):
def __init__(self):
super(MLP, self).__init__()
self.model = nn.Sequential(
nn.Linear(784, 200),
nn.LeakyReLU(inplace=True),
nn.Linear(200, 200),
nn.LeakyReLU(inplace=True),
nn.Linear(200, 10),
nn.LeakyReLU(inplace=True),
)
def forward(self, x):
x = self.model(x)
return x
device = torch.device('cuda:0')
net = MLP().to(device)
optimizer = optim.SGD(net.parameters(), lr=learning_rate)
criteon = nn.CrossEntropyLoss().to(device)
viz = Visdom()
viz.line([0.], [0.], win='train_loss', opts=dict(title='train loss'))
viz.line([[0.0, 0.0]], [0.], win='test', opts=dict(title='test loss&acc.',
legend=['loss', 'acc.']))
global_step = 0
for epoch in range(epochs):
for batch_idx, (data, target) in enumerate(train_loader):
data = data.view(-1, 28*28)
data, target = data.to(device), target.cuda()
logits = net(data)
loss = criteon(logits, target)
optimizer.zero_grad()
loss.backward()
# print(w1.grad.norm(), w2.grad.norm())
optimizer.step()
global_step += 1
viz.line([loss.item()], [global_step], win='train_loss', update='append')
if batch_idx % 100 == 0:
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
epoch, batch_idx * len(data), len(train_loader.dataset),
100. * batch_idx / len(train_loader), loss.item()))
test_loss = 0
correct = 0
for data, target in test_loader:
data = data.view(-1, 28 * 28)
data, target = data.to(device), target.cuda()
logits = net(data)
test_loss += criteon(logits, target).item()
pred = logits.argmax(dim=1)
correct += pred.eq(target).float().sum().item()
viz.line([[test_loss, correct / len(test_loader.dataset)]],
[global_step], win='test', update='append')
viz.images(data.view(-1, 1, 28, 28), win='x')
viz.text(str(pred.detach().cpu().numpy()), win='pred',
opts=dict(title='pred'))
test_loss /= len(test_loader.dataset)
print('\nTest set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format(
test_loss, correct, len(test_loader.dataset),
100. * correct / len(test_loader.dataset)))