嵌入式分享合集36
周末也来卷
一、GPIO电路原理
GPIO是通用输入/输出端口的简称,是STM32可控制的引脚。GPIO的引脚与外部硬件设备连接,可实现与外部通讯、控制外部硬件或者采集外部硬件数据的功能。
STM32F103ZET6芯片为144脚芯片,包括7个通用目的的输入/输出口(GPIO)组,分别为GPIOA、GPIOB、GPIOC、GPIOD、GPIOE、GPIOF、GPIOG,同时每组GPIO口组有16个GPIO口。通常简略称为PAx、PBx、PCx、PDx、PEx、PFx、PGx,其中x为0-15。
STM32的大部分引脚除了当GPIO使用之外,还可以复用为外设功能引脚,比如串口。 whaosoft aiot http://143ai.com
GPIO基本结构
每个GPIO内部都有这样的一个电路结构,这个结构在本文下面会具体介绍。

保护二极管:IO引脚上下两边两个二极管用于防止引脚外部过高、过低的电压输入。当引脚电压高于VDD时,上方的二极管导通;当引脚电压低于VSS时,下方的二极管导通,防止不正常电压引入芯片导致芯片烧毁。但是尽管如此,还是不能直接外接大功率器件,须加大功率及隔离电路驱动,防止烧坏芯片或者外接器件无法正常工作。
P-MOS管和N-MOS管:由P-MOS管和N-MOS管组成的单元电路使得GPIO具有“推挽输出”和“开漏输出”的模式。这里的电路会在下面很详细地分析到。
TTL肖特基触发器:信号经过触发器后,模拟信号转化为0和1的数字信号。但是,当GPIO引脚作为ADC采集电压的输入通道时,用其“模拟输入”功能,此时信号不再经过触发器进行TTL电平转换。ADC外设要采集到的原始的模拟信号。
这里需要注意的是,在查看《STM32中文参考手册V10》中的GPIO的表格时,会看到有“FT”一列,这代表着这个GPIO口时兼容3.3V和5V的。如果没有标注“FT”,就代表着不兼容5V。
STM32的GPIO工作方式
GPIO支持的输入输出模式:
-
GPIO_Mode_AIN 模拟输入
-
GPIO_Mode_IN_FLOATING 浮空输入
-
GPIO_Mode_IPD 下拉输入
-
GPIO_Mode_IPU 上拉输入
-
GPIO_Mode_Out_OD 开漏输出
-
GPIO_Mode_Out_PP 推挽输出
-
GPIO_Mode_AF_OD 复用开漏输出
-
GPIO_Mode_AF_PP 复用推挽输出
每个I/O口可以自由编程,但I/O口寄存器必须按32位字被访问。
下面将具体介绍GPIO的这八种工作方式:
浮空输入模式

浮空输入模式下,I/O端口的电平信号直接进入输入数据寄存器。也就是说,I/O的电平状态是不确定的,完全由外部输入决定;如果在该引脚悬空(在无信号输入)的情况下,读取该端口的电平是不确定的。
上拉输入模式

上拉输入模式下,I/O端口的电平信号直接进入输入数据寄存器。但是在I/O端口悬空(在无信号输入)的情况下,输入端的电平可以保持在高电平;并且在I/O端口输入为低电平的时候,输入端的电平也还是低电平。
下拉输入模式

下拉输入模式下,I/O端口的电平信号直接进入输入数据寄存器。但是在I/O端口悬空(在无信号输入)的情况下,输入端的电平可以保持在低电平;并且在I/O端口输入为高电平的时候,输入端的电平也还是高电平。
模拟输入模式

模拟输入模式下,I/O端口的模拟信号(电压信号,而非电平信号)直接模拟输入到片上外设模块,比如ADC模块等等。
开漏输出模式

开漏输出模式下,通过设置位设置/清除寄存器或者输出数据寄存器的值,途经N-MOS管,最终输出到I/O端口。这里要注意N-MOS管,当设置输出的值为高电平的时候,N-MOS管处于关闭状态,此时I/O端口的电平就不会由输出的高低电平决定,而是由I/O端口外部的上拉或者下拉决定;当设置输出的值为低电平的时候,N-MOS管处于开启状态,此时I/O端口的电平就是低电平。同时,I/O端口的电平也可以通过输入电路进行读取;注意,I/O端口的电平不一定是输出的电平。
开漏复用输出模式

开漏复用输出模式,与开漏输出模式很是类似。只是输出的高低电平的来源,不是让CPU直接写输出数据寄存器,取而代之利用片上外设模块的复用功能输出来决定的。
推挽输出模式

推挽输出模式下,通过设置位设置/清除寄存器或者输出数据寄存器的值,途经P-MOS管和N-MOS管,最终输出到I/O端口。这里要注意P-MOS管和N-MOS管,当设置输出的值为高电平的时候,P-MOS管处于开启状态,N-MOS管处于关闭状态,此时I/O端口的电平就由P-MOS管决定:高电平;当设置输出的值为低电平的时候,P-MOS管处于关闭状态,N-MOS管处于开启状态,此时I/O端口的电平就由N-MOS管决定:低电平。同时,I/O端口的电平也可以通过输入电路进行读取;注意,此时I/O端口的电平一定是输出的电平。
推挽复用输出模式

推挽复用输出模式,与推挽输出模式很是类似。只是输出的高低电平的来源,不是让CPU直接写输出数据寄存器,取而代之利用片上外设模块的复用功能输出来决定的。
总结与分析
什么是推挽结构和推挽电路?
推挽结构一般是指两个参数相同的三极管或MOS管分别受两互补信号的控制,总是在一个三极管或MOS管导通的时候另一个截止。高低电平由输出电平决定。
推挽电路是两个参数相同的三极管或MOSFET,以推挽方式存在于电路中,各负责正负半周的波形放大任务。电路工作时,两只对称的功率开关管每次只有一个导通,所以导通损耗小、效率高。输出既可以向负载灌电流,也可以从负载抽取电流。推拉式输出级既提高电路的负载能力,又提高开关速度。
开漏输出和推挽输出的区别?
开漏输出:只可以输出强低电平,高电平得靠外部电阻拉高。输出端相当于三极管的集电极。适合于做电流型的驱动,其吸收电流的能力相对强(一般20ma以内);
推挽输出:可以输出强高、低电平,连接数字器件。
关于推挽输出和开漏输出,最后用一幅最简单的图形来概括:

该图中左边的便是推挽输出模式,其中比较器输出高电平时下面的PNP三极管截止,而上面NPN三极管导通,输出电平VS+;当比较器输出低电平时则恰恰相反,PNP三极管导通,输出和地相连,为低电平。右边的则可以理解为开漏输出形式,需要接上拉。
在STM32中选用怎样选择I/O模式?
-
浮空输入_IN_FLOATING ——浮空输入,可以做KEY识别,RX1
-
带上拉输入_IPU——IO内部上拉电阻输入
-
带下拉输入_IPD—— IO内部下拉电阻输入
-
模拟输入_AIN ——应用ADC模拟输入,或者低功耗下省电
-
开漏输出_OUT_OD ——IO输出0接GND,IO输出1,悬空,需要外接上拉电阻,才能实现输出高电平。当输出为1时,IO口的状态由上拉电阻拉高电平,但由于是开漏输出模式,这样IO口也就可以由外部电路改变为低电平或不变。可以读IO输入电平变化,实现C51的IO双向功能
-
推挽输出_OUT_PP ——IO输出0-接GND, IO输出1 -接VCC,读输入值是未知的
-
复用功能的推挽输出_AF_PP ——片内外设功能(I2C的SCL、SDA)
-
复用功能的开漏输出_AF_OD——片内外设功能(TX1、MOSI、MISO.SCK.SS)
二、PWM控制电机转速原理
经常使用的直流电机原理就是电生磁:通电导线会产生磁场。
也就是电磁感应 旋转磁场带动转子转动。
电动机是由定子和转子组成,一个产生旋转磁场,一个为磁极,电机的转子(轴承)就转起来了。
这便实现了电能->磁能->机械能的转换。
下面这个图可以更直观的理解:

PWM原理
通过上文大概知道,通过PWM控制电机速度,实际上是控制供电电流的大小来实现
通电导线在磁场中受到的力称为安培力,而安培力的公式:F=BIL。
其中,F是受力大小,I是电流大小,L是导线长度。在其他条件不变的情况下,控制其通过的电流即控制安培力的大小。
电机的电阻R 是基本不变的,那么电流 I = U/R,F= BLU/R。
在R B L不变的情况,控制安培力的大小,本质就是修改供电电压的大小。
我们也就知道,控制电机转速的本质就是给电机供不同的供电电压,电压越大,电机转速越快。
而PWM的本质就是脉宽调制,通过输出不同的占空比,从而将直流电压转换成不同电压值的模拟信号。
控制电机速度
占空比可以实现对电机转速的调节,我们知道,占空比是高电平在一个周期之中的比值,高电平的所占的比值越大,占空比就越大,对于直流电机来讲,电机输出端引脚是高电平电机就可以转动,当输出端高电平时,电机会转动,但是是一点一点的提速,在高电平突然转向低电平时,电机由于电感有防止电流突变的作用是不会停止的,会保持这原有的转速,以此往复,电机的转速就是周期内输出的平均电压值,所以实质上我们调速是将电机处于一种,似停非停,似全速转动又非全速转动的状态,那么在一个周期的平均速度就是我们占空比调出来的速度了。
总结
在电机控制中,电压越大,电机转速越快,而通过PWM输出不同的模拟电压,便可以使电机达到不同的输出转速。
当然,在电机控制中,不同的电机都有其适应的频率 频率太低会导致运动不稳定,如果频率刚好在人耳听觉范围,有时还会听到呼啸声。频率太高的电机可能反应不过来,正常的电机频率在 6-16kHZ之间为好。
输出的电压就不同,电机转速就不同。那我们可以知道,通过滑动变阻器或者更换不同电压的电源都可以实现电机的调速,但是在实际应用中显然PWM更方便些。
专业一点的话就是:
所谓PWM就是脉宽调制器,通过调制器给电机提供一个具有一定频率的脉冲宽度可调的脉冲电。脉冲宽度越大即占空比越大,提供给电机的平均电压越大,电机转速就高。反之脉冲宽度越小,则占空比越越小。提供给电机的平均电压越小,电机转速就低。
三、一堆开关做成一个CPU
几乎每天都会开灯关灯,但这简单的开关却是组成CPU的基本单元。
分享本文,来看下怎么构建CPU这个非0即1的开关世界。
从晶体管到门电路
上世纪出现了晶体管这个小而伟大的发明。
有了晶体管,也就是开关,在此基础之上就可以搭建与、或、非门电路。
任何一个逻辑函数最终都可以通过与、或、非表达出来。也就是说,计算机最终可以通过简单的与、或、非门构造出来。
与或非门实现计算、存储电路
计算
以加法为例。
由于CPU只认知 0 和 1,也就是二进制,那么二进制的加法有哪些组合呢:
-
0 + 0,结果为0,进位为0
-
0 + 1,结果为1,进位为0
-
1 + 0,结果为1,进位为0
-
1 + 1,结果为0,进位为1
注意进位这一列,只有当两路输入的值都是 1 时,进位才是 1 ,这就是与门啊!
再看下结果一列,当两路输入的值不同时结果为1,输入结果相同时结果为0,这就是异或啊!
如下图,用一个与门和一个异或门就可以实现二进制加法:

上述电路就是一个简单的加法器,加法可以用与或非门实现。
除了加法,我们也可以根据需要将不同的算数运算设计出来,负责计算的电路有一个统称,这就是所谓的算术逻辑单元ALU(arithmetic/logic unit),是CPU 中专门负责运算的模块,本质上和上面的简单电路没什么区别,就是更加复杂而已。
现在,通过与或非门的组合我们获得了计算能力,计算能力就是这么来的。
但,只有计算能力是不够的,电路需要能记得住信息。
存储
到目前为止,你设计的组合电路比如加法器天生是没有办法存储信息的,它们只是简单的根据输入得出输出,但输入输出总的有个地方能够保存起来,这就是需要电路能保存信息。
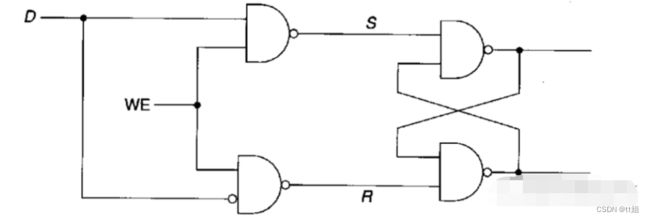
电路怎么能保存信息呢?有一天一位英国物理学家,给出了这样一个神奇电路:
![]()

这是两个与非门的组合。
比较独特的是该电路的组合方式,一个与非门的输出是另一个与非门的输入。该电路的组合方式会自带一种很有趣的特性,只要给S和R端输入1,那么这个电路只会有两种状态:
-
a端为1,此时B=0、A=1、b=0;
-
a端为0,此时B=1、A=0、b=1;
不会再有其他可能了,我们把a端的值作为电路的输出。
此后,你把S端置为0的话(R保持为1),那么电路的输出也就是a端永远为1,这时就可以说我们把1存到电路中了;而如果你把R段置为0的话(S保持为1),那么此时电路的输出也就是a端永远为0,此时我们可以说把0存到电路中了。
就这样,电路具备存储信息的能力了。
现在为保存信息你需要同时设置S端和R端,但你的输入是有一个(存储一个bit位嘛),为此你对电路进行了改造:
这样,当D为0时,整个电路保存的就是0,否则就是1。
寄存器与内存
现在你的电路能存储一个比特位了,想存储多个比特位还不简单,复制粘贴就可以了:

我们管这个组合电路就叫寄存器。
如果继续搭建更加复杂的电路以存储更多信息,同时提供寻址功能,就这样内存也诞生了
寄存器及内存都离不开上文那个简单电路,只要通电,这个电路中就保存信息,但是断电后很显然保存的信息就丢掉了,现在你应该明白为什么内存在断电后就不能保存数据了吧。
构建CPU
硬件平台
通过上文讲解知道,电路可以实现数据计算、信息存储的通用功能。但现在还有一个问题,真的有必要把所有的逻辑运算都用与或非门实现出来吗?这显然是不现实的。
没有必要为所有的计算逻辑实现出对应的硬件,硬件只需要提供最通用的功能。
接下来看下硬件是怎么提供所谓的通用功能。
让我们来思考一个问题,CPU怎么能知道自己要去对两个数进行加法计算,以及哪两个数进行加法计算呢?很显然,你得告诉CPU,该怎么告诉呢?
CPU也需要机器指令告诉自己该接下来该干什么,而指令通过我们上述实现的组合电路来执行。
指令集
指令集告诉我们 CPU 可以执行什么指令,每种指令需要提供什么样的操作数。不同类型的CPU会有不同的指令集。
指令集中的指令其实都非常简单,画风大体上是这样的:
-
从内存中读一个数,地址是abc
-
对两个数加和
-
检查一个数是不是大于6
-
把这数存储到内存,地址是abc
-
等等
看上去很像碎碎念有没有,这就是机器指令,我们用高级语言编写的程序,比如对一个数组进行排序,最终都会等价转换为上面的碎碎念指令,然后CPU一条一条的去执行。
接下来看一条可能的机器指令:

这条指令占据16比特,其中前四个比特告诉CPU这是加法指令,这意味着该CPU的指令集中可以包含2^4也就是16个机器指令,这四个比特位告诉CPU该做什么,剩下的bit告诉CPU该怎么做,也就是把寄存器R6和寄存器R2中的值相加然后写到寄存器R6中。
可以看到,机器指令是非常繁琐的,现代程序员都使用高级语言来编写程序。
时钟信号
现在我们的电路有了计算功能、存储功能,还可以通过指令告诉该电路执行什么操作,还有一个问题没有解决。
靠什么来协调或者说靠什么来同步电路各个部分让它们协同工作呢?
时钟信号就像指挥家手里拿的指挥棒,指挥棒挥动一下整个乐队会整齐划一的有个相应动作,同样的,时钟信号每一次电压改变,整个电路中的各个寄存器(也就是整个电路的状态)会更新一下,这样我们就能确保整个电路协同工作不会这里提到的问题。
现在你应该知道CPU的主频是什么意思了吧,主频是说一秒钟指挥棒挥动了多少次,显然主频越高CPU在一秒内完成的操作也就越多。
大功告成
现在我们有了可以完成各种计算的ALU、可以存储信息的寄存器以及控制它们协同工作的时钟信号,这些统称 Central Processing Unit,简称就是 CPU。
一个小小的开关竟然能构造出功能强大的 CPU ,这背后理论和制造工艺的突破是人类史上的里程碑时刻,说 CPU 是智慧的结晶简直再正确不过。
四、三极管电路的几种分析方法
三极管有静态和动态两种工作状态。未加信号时三极管的直流工作状态称为静态,此时各极电流称为静态电流,给三极管加入交流信号之后的工作电流称为动态工作电流,这时三极管是交流工作状态,即动态。
一个完整的三极管电路分析有四步:直流电路分析、交流电路分析、元器件和修理识图。
直流电路分析方法
直流工作电压加到三极管各个电极上主要通过两条直流电路:一是三极管集电极与发射极之间的直流电路,二是基极直流电路。
通过这一步分析可以搞清楚直流工作电压是如何加到集电极、基极和发射极上的。如图所示,是放大器直流电路分析示意图。对于一个单级放大器而言,其直流电路分析主要是图中所示的三个部分。

分析三极管直流电路时,由于电路中的电容具有隔直流特性,所以可以将它们看成开路,这样上图所示电路就可以画成如下图所示的直流等效电路,再用这一等效电路进行直流电路分析就相当简洁了。
![]()

交流电路分析方法
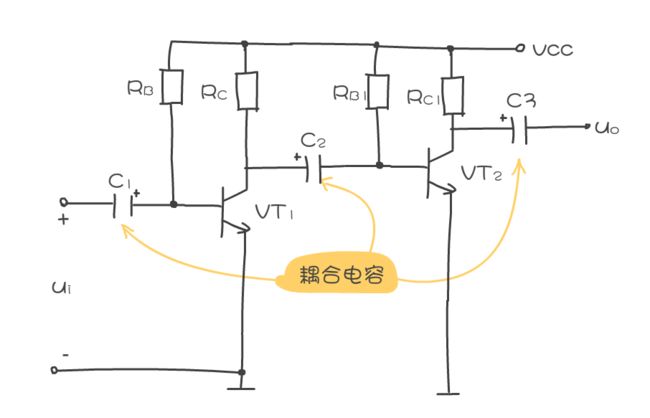
交流电路分析主要是交流信号的传输路线分析,即信号从哪里输入到放大器中,信号在这级放大器中具体经过了哪些元器件,信号最终从哪里输出。如图所示,是交流信号传输路线分析示意图。

另外还要分析信号在传输过程中受到了哪些处理,如信号在哪个环节放大,在哪个环节受到衰减,哪个环节不放大也不衰减,信号是否受到了补偿等。
上图电路中的信号经过了C1、VT1、C2、VT2和C3,其中C1、C2和C3是耦合电容,对信号没有放大和衰减作用,只是起着将信号传输到下级电路中的耦合作用,VT1和VT2对信号起了放大作用。
元器件作用分析方法
1 元器件特性是电路分析关键
分析电路中元器件的作用时,应依据该元器件的主要特性来进行。例如,耦合电容让交流信号无损耗的通过,而同时隔断直流通路,这一分析的理论根据是电容隔直通交特性。
2 元器件在电路中具体作用
电路中的每个元器件都有它的特定作用,通常一个元器件起一种特定的作用,当然也有一个元器件在电路中起两个作用的。在电路分析中要求搞懂每一个元器件在电路中的具体作用。
3 元器件简化分析方法
对元器件作用的分析可以进行简化,掌握了元器件在电路中的作用后,不必每次对各个元器件都进行详细分析。例如,掌握耦合电容的作用之后,不必对每一个耦合电容都进行分析。如图所示,是耦合电容分析示意图。
修理识图方法
修理识图为检修电路故障服务,这一识图要求在完全搞懂电路工作原理之后进行,否则没有意义。因为故障现象明确,因此故障检修过程中的修理识图可以有针对性的选择电路中的元器件进行,而不需要对电路中的每个元器件都进行故障分析。
分析时,找出电路中的主要元器件,并分别假设它们出现开路、短路、阻值变大和变小等故障,分析这种故障对直流电路和交流电路的影响,从而推理出可能的故障根源。
修理识图的关键是找出电路中关键测试点:
1 单级放大器关键测试点
如图所示,单级放大器主要是三极管的关键测试点。

三极管的关键测试点用来测量三个电极的直流工作电压,其中集电极是第一测试点,其次是基极,第三是发射极。三极管放大实例电路
2 集成电路关键测试点
集成电路关键测试点最重要的是电源引脚,还有输入信号引脚和输出信号引脚。
三极管基极偏置电路分析方法
三极管基极偏置电路分析最为困难,掌握一些电路分析方法可以方便基极偏置电路的分析。
第一步是在电路中找出三极管的电路符号,如图所示,然后在三极管电路符号中后找出基极,这是分析基极偏置电路的关键一步。
第二步从基极出发,将与基极和电源端相连的所有元器件找出来,如图所示,电路中的RB1,再将基极与地端相连的所有元器件找出来,如电路中的RB2,这些元器件构成基极偏置电路的主体电路。

上述与基极相连的元器件中,要区别哪些元器件可能是偏置电路中的元器件。电阻器有可能构成偏置电路,电容器具有隔直作用而视为开路,所以在分析基极直流偏置电路时,不必考虑电容器。
第三步确定偏置电路中的元器件后,进行基极电流回路的分析,如图所示。基极电流回路是:直流工作电压VCC→偏置电阻RB1→VT1基极→VT1发射极→VT1发射极电阻RE→地端