嵌入式分享合集42
一、USB-CAN
现在USB-CAN这种东西应该已经被做的烂大街的工具,国内居然没有一个拿得出手的开源方案。某立功和PCAN动辄2000+的价格也是离谱。淘宝上各种虚拟串口方案、替换dll兼容某立功软件的各种方案....价格都倒是便宜,性能和可靠性嘛.......就不多说了,上位机软件也是烂的一塌糊涂。
这里推荐一个国外的炒鸡好用的开源工具CANable,ta有完全开源的软硬件及上位机支持,支持windos和linux Stock can并且都免驱,且支持Python。
而且远不止于此,经过我不断探索,在gitlhub各个大神仓库各种折腾。whaosoft aiot http://143ai.com
发现这个canable这个项目衍生出了很多开源固件,目前固件和支持的软件已经极为丰富。
而且主芯片STM32F042/72支持USB DFU,可以通过USB直接更新固件,无缝切换多种上位机。
先上项目首页,canbale项目官网:
https://canable.io/

首先先看硬件项目

硬件项目其实叫做candleLight,github链接:
https://github.com/HubertD/candleLight] https://github.com/HubertD/candleLight
这个不带隔离的硬件设计是比较简单的,就是一块带usb和can的stm32f0 + CAN收发器TJA1051/3。
可惜的就是这颗stm32f0芯片现在价格涨得有点离谱了,之前在JLC打样做了几块,主芯片就去到40多大洋,加上pcb和smt,打样成本差不多投到100左右吧。
后来发现某宝上已经有商家把canable作出产品了,带隔离的价格也才100多,还带外壳配件,果断买了一个试试,某宝搜“开源 canable”就能找到,早知道就不用费劲自己打板了。
但是某宝上买的只提供了默认固件的相关资料,经过我不断探索,在gitlhub各个大神仓库各种折腾。
我发现这个canable这个项目衍生出了很多开源固件,目前固件和支持的软件已经极为丰富,可以说可玩性极高。我甚至怀疑很多某宝和咸鱼上的山寨PCAN就是canable换了一个壳子和固件而已!!!

pdf原理图:
https://github.com/HubertD/candleLight/blob/master/export/v1.1/pdf/candleLight-v1.1.pdf
重点还是固件,第一个先说重磅的,PCAN固件!
论坛已经有人分享了,还是这个链接:
https://github.com/moonglow/pcan_cantact
我会在附件里打包我编译好的代码和二进制文件可以直接USB烧写
烧写PCAN固件之后,CANable摇身一变就成了PEAK CAN-USB,直接可以使用PEAK的官方驱动以及软件(pcan-view/ pcan-explorer 5),甚至基于peak开发的其他二次开发软件(比如国内的一些新能源车上位机,奇瑞,北汽这些)。
目前使用下来和原装PCAN的兼容性还是相当不错的,但是注意不要用于ECU/PLC程序刷新,程序下载到到中途会出错,这个问题还需要进一步优化。但是想想原装PCAN动辄2000的价格,100多块钱的canable加上这个PCAN固件是真的香啊。

介绍第二个固件是canable的默认固件candleLight_fw
https://github.com/candle-usb/candleLight_fw
这个固件功能也蛮强大,采用的winUSB的免驱方案,USB bulk双缓冲的模式,实际传输性能远超那些虚拟串口的USB-CAN。
支持windos和linux Stock can并且都免驱,且支持Python。
linux下使用和PCAN一样都是内核自带驱动,支持SocketCAN 非常适合用一些开源的can的工具和库进行二次开发。
candleLight固件的图形化上位机叫做cangaroo。
cangaroo是candleLight固件专用的、简单易用的can总线调试软件,麻雀虽小五脏俱全,对于一般的can调试开发完全够用,而且专门针对汽车逆向工程增加了通过can id分类接收到的can数据帧,并且当某个id的数据帧活跃时会进行高亮显示以便于观察分析。
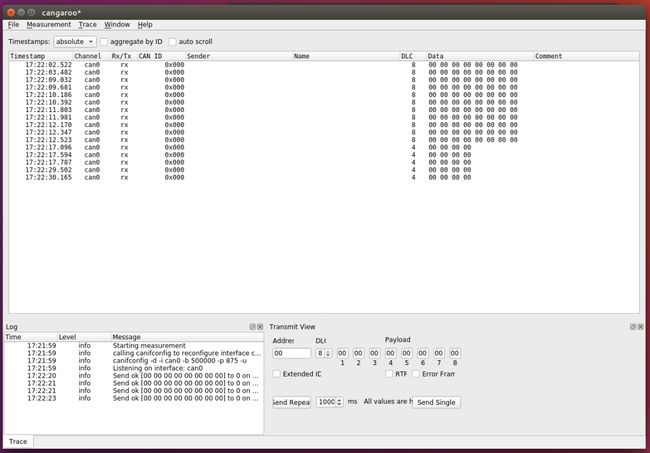
支持Windos/Linux (Ubuntu发行版本)
最大支持同时接入32个CANable模块
数据帧时间戳
支持数据日志保存
支持CAN DBC 文件协议解析
软件绿色免安装
candleLight固件还支持BUSMASTER(这个也就很厉害了,用过的都懂),BUSMASTER是一款功能强大的专业级CAN总线调试软件,不仅能够应对一般的CAN调试开发,还一个用于设计,监测,分析与模拟CAN网络的开源的开放式总线PC软件。BUSMASTER已被RBEI概念化,设计与开发,同时基于CANvas软件工具。
不过candleLight固件需要下载增加BUSMASTER增加了cantact设备支持的版本。

虚拟串口转can的Stock slcan固件
对于很多不熟悉usb编程,还是需要串口协议转can的小伙伴,slcan固件就正好满足需求,CANable通过烧写slcan固件。该固件枚举为Linux、Mac和Windows上的标准串行设备。CANable可以很容易地通过重新烧写固件,在Linux中枚举为本地can设备,在Windows中枚举为通用串口设备。
在Linux上,CANable原生地与slc一起工作,因此您可以使用所有标准的can-utils命令行工具,甚至Wireshark来与总线交互。
在Windows和Mac上,CANable可以和cantact-app一起工作。这是一个简单的Java应用程序,可以实时显示CAN流量,并允许您在总线上传输消息。

固件烧写方式

web在线烧写固件
如果只是想copy一个来用用,不需要去自己编译烧写,可以直接用STM32的USB DFU通过USB下载固件,我会在附件资料提供相应的软件和文档说明,并提供编译好的几个固件。
canable还提供了一个web的烧写页面:
https://canable.io/updater/
这个真的超级方便了,意味着你不需要任何烧写器或者准备任何固件编译的环境,只要有谷歌浏览器,就能随时随地切换固件,是不是很强大!
用谷歌浏览器打开这个页面,把canbale的DFU拨码开关按下去,在用USB连接电脑。选择需要烧写的的固件类型,再点connect and update就可以直接通过网页进行烧写。

注:这个网页上只能烧写canable的官方固件,自行编译的固件无法烧写(现在该页面已经支持烧写PCAN固件了!给力)。
USB DFU-util烧写固件
下载dfu-util-0.9-win64:
https://liquidtelecom.dl.sourceforge.net/project/dfu-util/dfu-util-0.9-win64.zip
解压后,将编译好的.bin文件拷贝到解压后的目录
创建一个文本文件,拷贝以下内容进去,注意candleLight_fw.binary 为要烧写的bin文件,需要改成需要烧写的文件名。然后把这个文本文件保存为flash.cmd
dfu-util --dfuse-address -d 0483:df11 -c 1 -i 0 -a 0 -s 0x08000000 -D candleLight_fw.binarycmd /k
canbale的DFU拨码开关按下去,连接电脑USB线会识别成“STM32 BOOTLOADER”
如果识别失败需要下载安装驱动,
https://canable.io/utilities/ImpulseRC_Driver_Fixer.exe
识别成功后,双击运行之前创建的flash.cmd文件,会看到开始烧写的进度,如下就是烧写完成了
Download [=========================] 100% 36108 bytesDownload done.File downloaded successfully
二、CAN总线详解
结合以上说说这个
1 简介
CAN是控制器局域网络(Controller Area Network, CAN)的简称,是一种能够实现分布式实时控制的串行通信网络。
优点:
传输速度最高到1Mbps,通信距离最远到10km,无损位仲裁机制,多主结构。近些年来,CAN控制器价格越来越低。
Ø 低成本:ECUs通过单个CAN接口进行通信,布线成本低。
Ø 高集成:CAN总线系统允许在所有ECUs上进行集中错误诊断和配置。
Ø 可靠性:该系统对子系统的故障和电磁干扰具有很强的鲁棒性,是汽车控制系统的理想选择。
Ø 高效率:可以通过id对消息进行优先级排序,以便最高优先级的id不被中断。
Ø 灵活性:每个ECU包含一个用于CAN总线收发芯片,随意添加CAN总线节点。
2 CAN总线网络
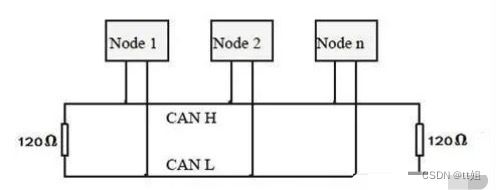
CAN总线网络主要挂在CAN_H和CAN_L,各个节点通过这两条线实现信号的串行差分传输,为了避免信号的反射和干扰,还需要在CAN_H和CAN_L之间接上120欧姆的终端电阻。为什么是120Ω,因为电缆的特性阻抗为120Ω,为了模拟无限远的传输线。
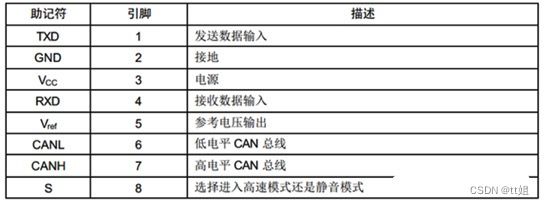
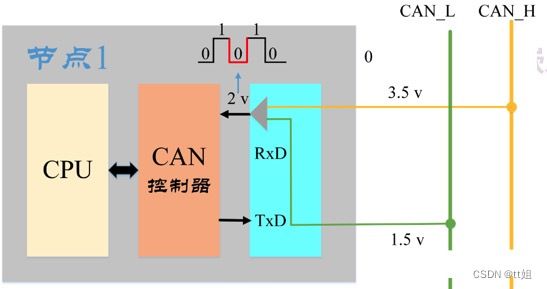
3 CAN收发器
CAN收发器的作用是负责逻辑电平和信号电平之间的转换。

即从CAN控制芯片输出逻辑电平到CAN收发器,然后经过CAN收发器内部转换将逻辑电平转换为差分信号输出到CAN总线上,CAN总线上的节点都可以决定自己是否需要总线上的数据。具体的引脚定义如下:
4 CAN信号表示
CAN总线采用不归零码位填充技术,也就是说CAN总线上的信号有两种不同的信号状态,分别是显性的(Dominant)逻辑0和隐形的(recessive)逻辑1,信号每一次传输完后不需要返回到逻辑0(显性)的电平。

显性与隐性电平的解释:
CAN的数据总线有两条,一条是黄色的CAN_High,一条是绿色的CAN_Low。当没有数据发送时,两条线的电平一样都为2.5V,称为静电平,也就是隐性电平。当有信号发送时,CAN_High的电平升高1V,即3.5V,CAN_Low的电平降低1V,即1.5V。
按照定义的:
-
CAN_H-CAN_L < 0.5V 时候为隐性的,逻辑信号表现为"逻辑1"- 高电平。
-
CAN_H-CAN_L > 0.9V 时候为显性的,逻辑信号表现为"逻辑0"- 低电平。
5 CAN信号传输
发送过程:CAN控制器将CPU传来的信号转换为逻辑电平(即逻辑0-显性电平或者逻辑1-隐性电平)。CAN发射器接收逻辑电平之后,再将其转换为差分电平输出到CAN总线上。
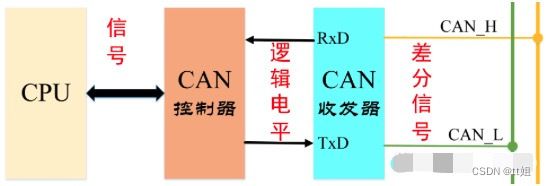
接收过程:CAN接收器将CAN_H 和 CAN_L 线上传来的差分电平转换为逻辑电平输出到CAN控制器,CAN控制器再把该逻辑电平转化为相应的信号发送到CPU上。
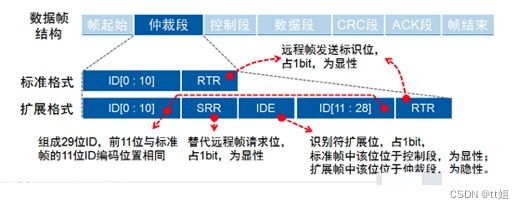
6 CAN数据传输
CAN总线传输的是CAN帧,CAN的通信帧分成五种,分别为数据帧、远程帧、错误帧、过载帧和帧间隔。
数据帧根据仲裁段长度不同分为标准帧(2.0A)和扩展帧(2.0B)。

帧起始
由一个显性位(低电平)组成,发送节点发送帧起始,其他节点同步于帧起始;
帧结束
由7个隐形位(高电平)组成。

仲裁段
只要总线空闲,总线上任何节点都可以发送报文,如果有两个或两个以上的节点开始传送报文,那么就会存在总线访问冲突的可能。但是CAN使用了标识符的逐位仲裁方法可以解决这个问题。
CAN总线控制器在发送数据的同时监控总线电平,如果电平不同,则停止发送并做其他处理。如果该位位于仲裁段,则退出总线竞争;如果位于其他段,则产生错误事件。
假设节点A、B和C都发送相同格式相同类型的帧,如标准格式数据帧,它们竞争总线的过程是:

帧ID越小,优先级越高。由于数据帧的RTR位为显性电平,远程帧为隐性电平,所以帧格式和帧ID相同的情况下,数据帧优先于远程帧;由于标准帧的IDE位为显性电平,扩展帧的IDE位为隐形电平,对于前11位ID相同的标准帧和扩展帧,标准帧优先级比扩展帧高。
数据段
一个数据帧传输的数据量为0~8个字节,这种短帧结构使得CAN-bus实时性很高,非常适合汽车和工控应用场合如图27所示。

数据量小,发送和接收时间短,实时性高,被干扰的概率小,抗干扰能力强。