目标检测文献
Oriented R-CNN
[1] Xie X , Cheng G , Wang J , et al. Oriented R-CNN for Object Detection[C]// 2021.
Current state-of-the-art two-stage detectors generate oriented proposals through time-consuming schemes. This diminishes the detectors’ speed, thereby becoming the computational bottleneck in advanced oriented object detection systems. This work proposes an effective and simple oriented object detection framework, termed Oriented R-CNN, which is a general two-stage oriented detector with promising accuracy and efficiency. To be specific, in the first stage, we propose an oriented Region Proposal Network (oriented RPN) that directly generates high-quality oriented proposals in a nearly cost-free manner. The second stage is oriented R-CNN head for refining oriented Regions of Interest (oriented RoIs) and recognizing them. Without tricks, oriented R-CNN with ResNet50 achieves state-of-the-art detection accuracy on two commonly-used datasets for oriented object detection including DOTA (75.87% mAP) and HRSC2016 (96.50% mAP), while having a speed of 15.1 FPS with the image size of 1024×1024 on a single RTX 2080Ti. We hope our work could inspire rethinking the design of oriented detectors and serve as a baseline for oriented object detection.
N-RPN
[1] Cho M A , Chung T Y , Lee H , et al. N-RPN: Hard Example Learning For Region Proposal Networks[C]// 2019 IEEE International Conference on Image Processing (ICIP). IEEE, 2019.
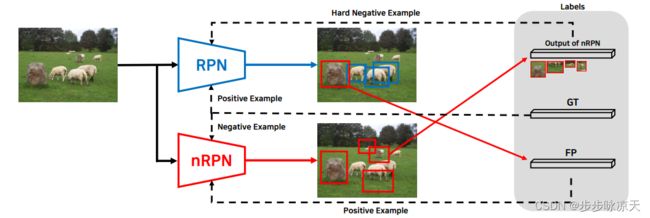
The region proposal task is to generate a set of candidate regions that contain an object. In this task, it is most important to propose as many candidates of ground-truth as possible in a fixed number of proposals. In a typical image, however, there are too few hard negative examples compared to the vast number of easy negatives, so region proposal networks struggle to train on hard negatives. Because of this problem, networks tend to propose hard negatives as candidates, while failing to propose ground-truth candidates, which leads to poor performance. In this paper, we propose a Negative Region Proposal Network(nRPN) to improve Region Proposal Network(RPN). The nRPN learns from the RPN’s false positives and provide hard negative examples to the RPN. Our proposed nRPN leads to a reduction in false positives and better RPN performance. An RPN trained with an nRPN achieves performance improvements on the PASCAL VOC 2007 dataset
FPN
[1] Lin T Y , Dollar P , Girshick R , et al. Feature Pyramid Networks for Object Detection[C]// 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). IEEE Computer Society, 2017.
Feature pyramids are a basic component in recognition systems for detecting objects at different scales. But recent deep learning object detectors have avoided pyramid representations, in part because they are compute and memory intensive. In this paper, we exploit the inherent multi-scale, pyramidal hierarchy of deep convolutional networks to construct feature pyramids with marginal extra cost. A top-down architecture with lateral connections is developed for building high-level semantic feature maps at all scales. This architecture, called a Feature Pyramid Network (FPN), shows significant improvement as a generic feature extractor in several applications. Using FPN in a basic Faster R-CNN system, our method achieves state-of-the-art single-model results on the COCO detection benchmark without bells and whistles, surpassing all existing single-model entries including those from the COCO 2016 challenge winners. In addition, our method can run at 5 FPS on a GPU and thus is a practical and accurate solution to multi-scale object detection
Faster R-CNN
Cite
[1] Ren S , He K , Girshick R , et al. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2017, 39(6):1137-1149.
Abtract
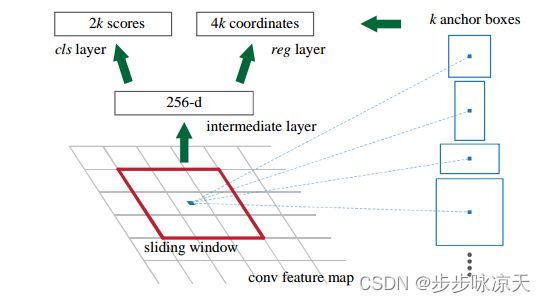
State-of-the-art object detection networks depend on region proposal algorithms to hypothesize object locations. Advances like SPPnet [7] and Fast R-CNN [5] have reduced the running time of these detection networks, exposing region proposal computation as a bottleneck. In this work, we introduce a Region Proposal Network (RPN) that shares full-image convolutional features with the detection network, thus enabling nearly cost-free region proposals. An RPN is a fully-convolutional network that simultaneously predicts object bounds and objectness scores at each position. RPNs are trained end-to-end to generate highquality region proposals, which are used by Fast R-CNN for detection. With a simple alternating optimization, RPN and Fast R-CNN can be trained to share convolutional features.
Note
在mmdetection中还没找到四步训练怎么实现
Fast R-CNN
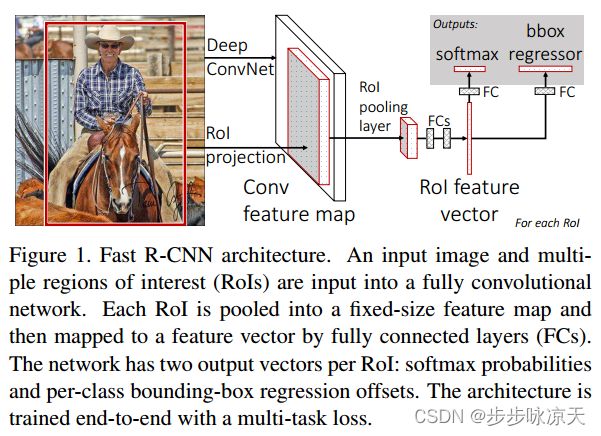
[1] Girshick R . Fast R-CNN[J]. Computer Science, 2015.
SPPnet
[1] He K , Zhang X , Ren S , et al. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2014, 37(9):1904-16.
Existing deep convolutional neural networks (CNNs) require a fixed-size (e.g., 224 × 224) input image. This requirement is “artificial” and may reduce the recognition accuracy for the images or sub-images of an arbitrary size/scale. In this work, we equip the networks with another pooling strategy, “spatial pyramid pooling”, to eliminate the above requirement. The new network structure, called SPP-net, can generate a fixed-length representation regardless of image size/scale. Pyramid pooling is also robust to object deformations. With these advantages, SPP-net should in general improve all CNN-based image classification methods. On the ImageNet 2012 dataset, we demonstrate that SPP-net boosts the accuracy of a variety of CNN architectures despite their different designs. On the Pascal VOC 2007 and Caltech101 datasets, SPP-net achieves state-of-the-art classification results using a single full-image representation and no fine-tuning. The power of SPP-net is also significant in object detection. Using SPP-net, we compute the feature maps from the entire image only once, and then pool features in arbitrary regions (sub-images) to generate fixed-length representations for training the detectors. This method avoids repeatedly computing the convolutional features. In processing test images, our method is 24-102 × faster than the R-CNN method, while achieving better or comparable accuracy on Pascal VOC 2007. In ImageNet Large Scale Visual Recognition Challenge (ILSVRC) 2014, our methods rank #2 in object detection and #3 in image classification among all 38 teams. This manuscript also introduces the improvement made for this competition.