机器视觉运动控制一体机应用例程|连接器针脚完整性检测系统
一、应用背景
近年来,随着机器视觉技术在制造业中的应用越来越广泛,连接器行业对机器视觉检测的需求也急剧增加。虽然连接器种类繁多,但其制造工序基本一致,加工工序一般可分为四个阶段:冲压、电镀、注塑、组装。
其中在连接器的组装工序当中,需将电镀好的PIN针脚与注塑盒座进行接插,针脚接插的方式可分为两种∶单独对插或组合对插。单独对插是指每次接插一个插针,组合对插则一次将多个插针同时与盒座接插。不论采取哪种接插方式,客户都要求在组装工序中检测所有连接器的针脚有无缺失和针脚位置是否准确。
由于人工检测的速度达不到实际的生产需求且检测良率不高,因而直接导致生产企业整体的生产产能、盈利能力不高。为此正运动技术针对以上连接器生产企业遇到的问题,提供了有效的连接器针脚完整性检测系统。
此系统采用全天候自动循环在线检测方式。把组装调试好的检测系统安装于生产线中,当设备上的传感器感应到待检产品到达检测工位时,触发检测开关,相机开始拍照检测,判断连接器的针脚是否完整,然后依据判断结果输出对应IO信号,以控制指示灯及报警器,下料执行机构依据指示进行相应的动作。
正运动技术的视觉检测方案具有检测速度快、可靠性好、生产效率高等特点,在连接器行业中进行机器视觉连接器针脚完整性检测具有较好的应用性,同时也有着广泛的市场应用场景。
上期课程,我们讲述了在机器视觉方案中锂电池上料加工定位的应用案例,本期课程我们将和大家一起分享如何去实现连接器针脚完整性检测的功能。
视觉运动控制一体机应用例程(二十四)连接器针脚完整性检测系统
二、检测原理
(一)检测需求
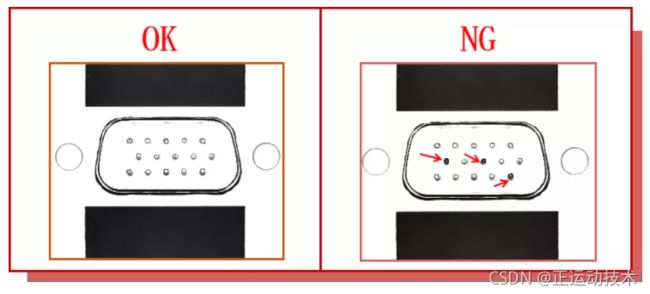
匹配定位当前放置连接器位置,再进行针脚完整性检测,最后输出检测结果给执行机构,进行下一步动作。
(二)软件算法
先使用创建模板学习连接器的形状模板,接着将形状模板位置结果作为基准位置和检测矩形ROI的位置源。
然后将图片进行二值化处理,其次计算黑色BLOB连通区域,将BLOB黑色连通区域结果存放到列表后,并对黑色连通区域的结果面积进行过滤。
接着再设置判定条件,如果黑色连通区域数量>0,当前检测的连接器针脚完整性则为NG,否则为OK。最后在界面绘制检测区域显示当前连接器没有针脚的位置。

三、软件实现
1.打开ZDevelop软件:新建名称为“连接器针脚完整性检测.zpj”项目→新建“HMI”文件→新建“功能.bas”文件(用于编写界面响应函数)→新建“Basic.bas”文件(用于存放全局变量并开启HMI自动运行任务,以及用于初始化测量参数)→新建“draw.bas”文件(用于更新绘制ROI数据)→新建“camera.bas”文件(用于实现相机采集功能)→文件添加到项目。

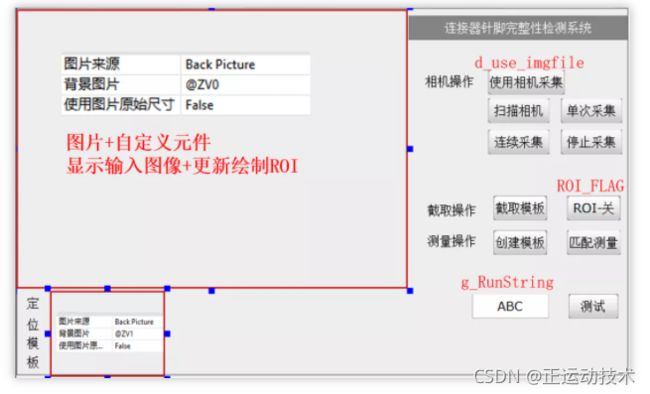
2.设计HM主界面。

3.关联HMI主界面控件变量。
4.本期课程的代码实现的功能主要使用到的指令是计算矩形ROI检测区域黑色连通区域的面积,之后进行面积过滤,最后再获取过滤后的黑色连通区域数量做判定等相关指令。
(1)计算连通区域面积
ZV_REAREA(参数1:输入连通区域,参数2:TABLE索引,输出面积)
(2)计算区域的连通区域
ZV_REAREA(参数1:输入连通区域,参数2:列表,输出参数)
(3)过滤
ZV_REFILTER(参数1:待过滤的区域列表,参数2:区域特征类型,参数3:特征值的下限,参数4:特征值的上限,参数5:是否反向选择,为1则保留不在范围内的轮廓)
(4)获取元素数量
ZV_LISTGET(参数1:输入列表,参数2:获取的元素对象,参数3:指定元素的id,从序号0开始)
(5)绘制区域
ZV_REGION(参数1:绘制目标图像,参数2:输入绘制的目标,参数3:0-绘制re有效部分,1-绘制re非有效部分,2-绘制re外边缘部分,参数4:指定绘制区域的颜色)

四、操作演示
(一)操作步骤
查看运行效果:将项目下载到控制器中→使用本地图片→单次采集→点击ROI-开按钮(设置形状模板学习区域)→点击截取模板→点击创建模板(进行创建形状模板)→点击匹配测试(进行连接器检测操作)→点击测试(查看检测结果)→结束。
(二)效果演示

本次,正运动技术机器视觉运动控制一体机应用例程丨连接器针脚完整性检测系统,就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。