一、背景
前段时间都是基于Python的OpecCV进行一些学习和实践,但小的知识点并没有应用到实际的项目中;并且基于Python的版本的移植性、效率性都较差,在包含硬件的项目中往往都是采用基于C++的版本;
因此本次项目实战专题主要是基于C++的版本,并且从大的任务中剖析小的知识点,实际项目中算法的选型也是比较难的部分,根据需求和任务选用不同的算法,这才是真的掌握了知识点;
本次项目是照片转扫描文件,可以参考下面网址中的案例:
https://www.camscanner.com/
这已经是一个落地且成熟的项目了,下面将结合多个知识点进行实现;
二、基础知识
首先需要明确实现该任务的几个步骤:
1、视角转换:不规则四边形转变为矩形(使用透视变换算法);
2、背景降噪:去掉图中的一些噪声点(使用中值滤波算法);
3、颜色变换:二值化图像,使得呈现黑白扫描图(使用自适应高斯阈值算法);
投影变换算法介绍:
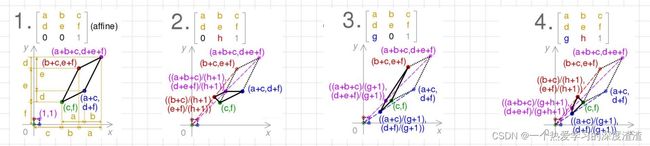
图1代表仿射变换,只需要6个自由度,并且约束条件是原来平行的线依旧平行,只需三对点对就可以求得未知参数值;
图4代表投影变换,需要四对点对,有8个自由度,可以将任意四边形变换为指定的四边形形状;
降噪算法介绍:
中值滤波算法示意图:
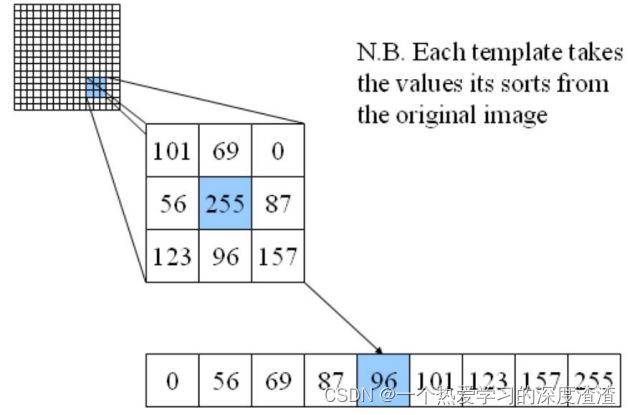
找到滑窗中中值的数,替换中间区域的数值;
原理上是将一些较亮、较暗的点进行降噪,也就是降噪的作用;
像高斯滤波和均值滤波,考虑到一个全局信息,是起到一个平滑的作用;
三、方案一:自动检测点
1、读取图片文件(进行了指定尺寸缩放)
// 读取图片
Mat readFile(String imagePath, int minEdge = 1080) {
Mat image = imread(imagePath);
int width = image.size().width;
int height = image.size().height;
int minline = min(width, height);
float ratio = minEdge * 1.0 / minline; // 得到缩放比例
int processWith = width * ratio;
int peocessHeight = height * ratio;
Mat resultImg; // 保存处理后图像
resize(image, resultImg, Size(processWith, peocessHeight));
return resultImg;
}
这里再定义一个显示图像的方法:
// 显示图片
void visualize(String winName, Mat image) {
namedWindow(winName, WINDOW_NORMAL);
imshow(winName, image);
waitKey(0);
}
2、创建直线类并计算两条直线的交点
先定义一个直线类,包含两个端点;
假设已知两条直线上的两点,怎么求得交点呢?
可以参考这个网址中的数学公式:https://en.wikipedia.org/wiki/Line%E2%80%93line_intersection
// 返回两条直线的交点
Point2f linesIntersect(Line lin1, Line lin2) {
// 这里直接根据网上的数学公式求得
int x1 = lin1.p1.x, y1 = lin1.p1.y;
int x2 = lin1.p2.x, y2 = lin1.p2.y;
int x3 = lin2.p1.x, y3 = lin2.p1.y;
int x4 = lin2.p2.x, y4 = lin2.p2.y;
float D = (x1 - x2) * (y3 - y4) - (y1 - y2) * (x3 - x4);
if (fabs(D) > 1e-6) {
return Point2f(
((x1 * y2 - y1 * x2) * (x3 - x4) - (x1 - x2) * (x3 * y4 - y3 * x4)) / D,
((x1 * y2 - y1 * x2) * (y3 - y4) - (y1 - y2) * (x3 * y4 - y3 * x4)) / D);
}
return Point2f(-1, -1);
}
3、图像边缘检测Canny
Mat canny, gray; cvtColor(image, gray, COLOR_BGR2GRAY); double threshold_low = threshold(gray, canny, 0, 255, THRESH_BINARY | cv::THRESH_OTSU); Canny(gray, canny, threshold_low, threshold_low * 2); return canny;
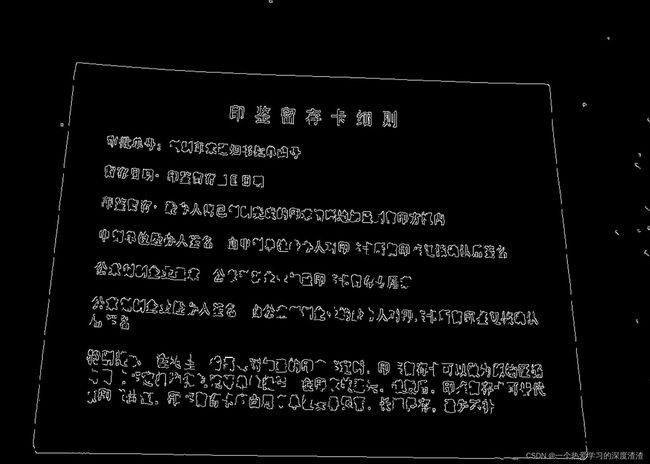
注意:进行Canny边缘检测的效果和图像的大小有关,可以适当对大图进行缩放;
4、通过霍夫变换进行直线检测
检测到的直线分为两类,一类是水平线,一类是竖直线;
为了得到外边缘框的直线,可以先根据直线的外接矩形长宽比分为水平和竖直线,再根据中点的位置,找到边缘直线;
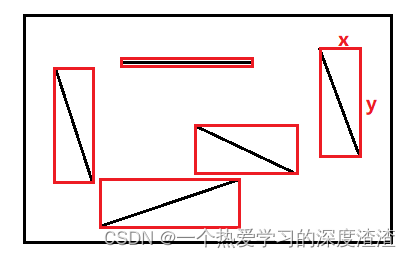
如上图所示,如果x>y,则将该直线分为水平线,如果y>x,则将该直线划分为水平线;
随后再根据中心点的坐标大小确定边缘线;
// 进行霍夫直线检测,保存所有检测到的直线,并且确保直线大于4条 vectorlines; // 这里的参数需要根据图像大小等因素进行微调 HoughLinesP(canny, lines, 1, CV_PI / 180, 80, height/5, 200); if (lines.size() < 4) { cout << "Find only" << lines.size() << "lines, return directly" << endl; } // 将直线分为水平线和垂直线 vector horizontals, verticals; Mat tmp = image.clone(); for (auto v : lines) { double w = fabs(v[0] - v[2]), h = fabs(v[1] - v[3]); Line tmp_line(Point(v[0], v[1]), Point(v[2], v[3])); if (w > h) horizontals.push_back(tmp_line); else verticals.push_back(tmp_line); // 下面两行代码是实现绘制直线 //line(tmp, Point(v.val[0], v.val[1]), Point(v.val[2], v.val[3]), Scalar(255, 0, 0), 8); //visualize("hough test", tmp); } // 确保水平线和垂直线至少有两条 if (horizontals.size() < 2 || verticals.size() < 2) { cout << "Not enough edge lines... " << endl; } // 将水平和垂直线按中心点位置进行排序,这里的两个排序函数需要自己实现 sort(horizontals.begin(), horizontals.end(), cmpHeight); sort(verticals.begin(), verticals.end(), cmpWidth); // 绘制出找到的直线 line(tmp, horizontals[0].p1, horizontals[0].p2, Scalar(255, 0, 0), 8); line(tmp, horizontals[horizontals.size()-1].p1, horizontals[horizontals.size() - 1].p2, Scalar(255, 0, 0), 8); line(tmp, verticals[0].p1, verticals[0].p2, Scalar(255, 0, 0), 8); line(tmp, verticals[verticals.size()-1].p1, verticals[verticals.size() - 1].p2, Scalar(255, 0, 0), 8); visualize("hough test", tmp);
排序函数的实现:
// 对水平线进行排序
bool cmpHeight(const Line& l1, const Line& l2) {
return l1.center.y < l2.center.y;
}
// 对垂直线进行排序
bool cmpWidth(const Line& l1, const Line& l2) {
return l1.center.x < l2.center.x;
}
5、求单应性矩阵
现在已知图像上目标的四个点坐标,通过点对关系,求得二者之间的单应性变换矩阵;
int dst_width = 1080, dst_height = 1920; vectordst_pts; dst_pts.push_back(Point(0, 0)); dst_pts.push_back(Point(dst_width - 1, 0)); dst_pts.push_back(Point(0, dst_height - 1)); dst_pts.push_back(Point(dst_width - 1, dst_height - 1)); Mat warpedImg = Mat::zeros(dst_height, dst_width, CV_8UC3); Mat homo = getPerspectiveTransform(ori_pts, dst_pts); warpPerspective(image, warpedImg, homo, warpedImg.size()); visualize("result", warpedImg);
结果图:
6、降噪和二值化
降噪采用中值滤波,阈值过滤采用自适应的二值化;
void postProcess(Mat& image) {
medianBlur(image, image, 7);
cvtColor(image, image, COLOR_BGR2GRAY);
threshold(image, image, 0, 255, THRESH_BINARY | cv::THRESH_OTSU);
}
四、方案二:用户点选目标区域
方案一是完全基于自动化的方式,用户只需要传入图像,程序会自动选择合适的区域;
优点在于其节省了用户的人工成本,使得程序更为简便;
缺点在于算法具有局限性,对背景及区域选取有要求,比如不能在区域外出现干扰物体,也无法满足用户的一些特别需求,比如选定大区域中的小区域;
方案二的优势在于其强大的灵活性,用户可以根据自己的需求选择相应的区域,程序将对所选区域进行转换;
1、命令行解析
加入命令行参数的功能,用户可以从命令行传入参数;
int main(int argc, char** argv)
{
const String keys =
"{help h usage ? | | print this message }"
"{path |D: / project / OpenCV / card.jpg| path to file }"
;
// 采用opencv命令行解析的方式
CommandLineParser myParser(argc, argv, keys);
String path = myParser.get("path");
cout << path << endl;
}
2、鼠标事件
主要实现用户点击鼠标时的一些交互功能:
// 这几个参数为默认参数
void onMouse(int event, int x, int y, int flags, void* userdata) {
// 当点数为四个时,判断当前用户鼠标选取的拖动点是哪一个
if (srcPts.size() == 4) {
for (int i = 0; i < 4; i++) {
Point2f v = srcPts[i];
if ((event == EVENT_LBUTTONDOWN) & (abs(v.x - x) < 20) & (abs(v.y - y) < 20)) {
isDragging = true;
drag_index = i;
}
}
}
// 用户点击鼠标左键时,加入点
else if (event == EVENT_LBUTTONDOWN) {
srcPts.push_back(Point2f(x, y));
}
// 取消拖动
if (event == EVENT_LBUTTONUP) {
isDragging = false;
}
// 如果鼠标移动并且一直按着,就改变原来的点
if ((event == EVENT_MOUSEMOVE) && isDragging) {
srcPts[drag_index].x = x;
srcPts[drag_index].y = y;
}
}
3、主函数实现
定义了鼠标函数之后,需要将其中的操作在窗口进行展示:
namedWindow(winNameOri, WINDOW_NORMAL);
namedWindow(winNameRes, WINDOW_NORMAL);
setMouseCallback(winNameOri, onMouse, nullptr);
bool done = false;
while (!done) {
if (srcPts.size() < 4) {
img = oriImg.clone();
for (int i = 0; i < srcPts.size(); i++) {
circle(img, srcPts[i], 10, Scalar(255, 255, 0), 5);
putText(img, labels[i].c_str(), srcPts[i], FONT_HERSHEY_SIMPLEX, 1, Scalar(255, 255, 255), 2);
}
imshow(winNameOri, img);
}
if (srcPts.size() == 4) {
img = oriImg.clone();
for (int i = 0; i < 4; i++) {
circle(img, srcPts[i], 10, Scalar(255, 255, 0), 5);
line(img, srcPts[i], srcPts[(i + 1) % 4], Scalar(0, 255, 0), 5);
putText(img, labels[i].c_str(), srcPts[i], FONT_HERSHEY_SIMPLEX, 1, Scalar(255, 255, 255), 2);
}
imshow(winNameOri, img);
}
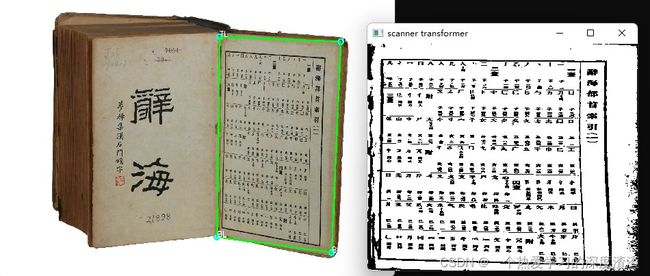
4、结果展示
后面的求取单应性矩阵以及降噪和二值化同方案一一致,在这里就不进行展示了;
结果图:
五、总结
本次项目是基于C++实现的,后续我也用Python进行了代码的转换,但在直线检测部分用相同函数却得到不同的效果,这个问题还没有进行解决;
采用C++进行编写代码,能够对整个项目的每个变量以及流程更加熟悉,本次项目可以说是一个多个知识点的集合项目,不仅仅包含边缘检测、直线检测、图像变换等,其中也有很多值得思考的小点;
以上就是C++ OpenCV实战之文档照片转换成扫描文件的详细内容,更多关于C++ OpenCV照片转扫描文件的资料请关注脚本之家其它相关文章!