机器学习的实用程序
设置
我们现在必须为可重复性设置很多种子,所以让我们将它们全部包装在一个函数中。
import numpy as np
import pandas as pd
import random
import torch
import torch.nn as nnSEED = 1234def set_seeds(seed=1234):
"""Set seeds for reproducibility."""
np.random.seed(seed)
random.seed(seed)
torch.manual_seed(seed)
torch.cuda.manual_seed(seed)
torch.cuda.manual_seed_all(seed) # multi-GPU# Set seeds for reproducibility
set_seeds(seed=SEED)# Set device
cuda = True
device = torch.device("cuda" if (
torch.cuda.is_available() and cuda) else "cpu")
torch.set_default_tensor_type("torch.FloatTensor")
if device.type == "cuda":
torch.set_default_tensor_type("torch.cuda.FloatTensor")
print (device)加载数据
我们将使用之前课程中相同的螺旋数据集来演示我们的实用程序。
import matplotlib.pyplot as plt
import pandas as pd# Load data
url = "https://raw.githubusercontent.com/GokuMohandas/Made-With-ML/main/datasets/spiral.csv"
df = pd.read_csv(url, header=0) # load
df = df.sample(frac=1).reset_index(drop=True) # shuffle
df.head()| X1 | X2 | color | |
|---|---|---|---|
| 0 | 0.106737 | 0.114197 | c1 |
| 1 | 0.311513 | -0.664028 | c1 |
| 2 | 0.019870 | -0.703126 | c1 |
| 3 | -0.054017 | 0.508159 | c3 |
| 4 | -0.127751 | -0.011382 | c3 |
# Data shapes
X = df[["X1", "X2"]].values
y = df["color"].values
print ("X: ", np.shape(X))
print ("y: ", np.shape(y))X: (1500, 2)
y: (1500,)# Visualize data
plt.title("Generated non-linear data")
colors = {"c1": "red", "c2": "yellow", "c3": "blue"}
plt.scatter(X[:, 0], X[:, 1], c=[colors[_y] for _y in y], edgecolors="k", s=25)
plt.show()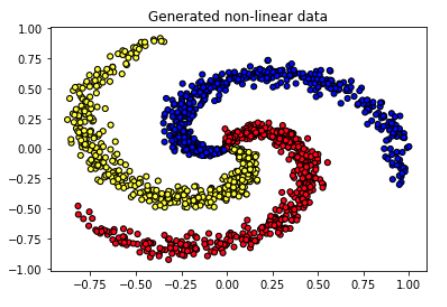
拆分数据
import collections
from sklearn.model_selection import train_test_splitTRAIN_SIZE = 0.7
VAL_SIZE = 0.15
TEST_SIZE = 0.15def train_val_test_split(X, y, train_size):
"""Split dataset into data splits."""
X_train, X_, y_train, y_ = train_test_split(X, y, train_size=TRAIN_SIZE, stratify=y)
X_val, X_test, y_val, y_test = train_test_split(X_, y_, train_size=0.5, stratify=y_)
return X_train, X_val, X_test, y_train, y_val, y_test# Create data splits
X_train, X_val, X_test, y_train, y_val, y_test = train_val_test_split(
X=X, y=y, train_size=TRAIN_SIZE)
print (f"X_train: {X_train.shape}, y_train: {y_train.shape}")
print (f"X_val: {X_val.shape}, y_val: {y_val.shape}")
print (f"X_test: {X_test.shape}, y_test: {y_test.shape}")
print (f"Sample point: {X_train[0]} → {y_train[0]}")X_train: (1050, 2), y_train: (1050,)
X_val: (225, 2), y_val: (225,)
X_test: (225, 2), y_test: (225,)
采样点:[-0.63919105 -0.69724176] → c1标签编码
接下来,我们将定义 aLabelEncoder将我们的文本标签编码为唯一索引。我们不再使用 scikit-learn 的 LabelEncoder,因为我们希望能够以我们想要的方式保存和加载我们的实例。
import itertoolsclass LabelEncoder(object):
"""Label encoder for tag labels."""
def __init__(self, class_to_index={}):
self.class_to_index = class_to_index or {} # mutable defaults ;)
self.index_to_class = {v: k for k, v in self.class_to_index.items()}
self.classes = list(self.class_to_index.keys())
def __len__(self):
return len(self.class_to_index)
def __str__(self):
return f""
def fit(self, y):
classes = np.unique(y)
for i, class_ in enumerate(classes):
self.class_to_index[class_] = i
self.index_to_class = {v: k for k, v in self.class_to_index.items()}
self.classes = list(self.class_to_index.keys())
return self
def encode(self, y):
encoded = np.zeros((len(y)), dtype=int)
for i, item in enumerate(y):
encoded[i] = self.class_to_index[item]
return encoded
def decode(self, y):
classes = []
for i, item in enumerate(y):
classes.append(self.index_to_class[item])
return classes
def save(self, fp):
with open(fp, "w") as fp:
contents = {'class_to_index': self.class_to_index}
json.dump(contents, fp, indent=4, sort_keys=False)
@classmethod
def load(cls, fp):
with open(fp, "r") as fp:
kwargs = json.load(fp=fp)
return cls(**kwargs) # Encode
label_encoder = LabelEncoder()
label_encoder.fit(y_train)
label_encoder.class_to_index{“c1”:0,“c2”:1,“c3”:2}# Convert labels to tokens
print (f"y_train[0]: {y_train[0]}")
y_train = label_encoder.encode(y_train)
y_val = label_encoder.encode(y_val)
y_test = label_encoder.encode(y_test)
print (f"y_train[0]: {y_train[0]}")y_train[0]:c1
y_train[0]:0# Class weights
counts = np.bincount(y_train)
class_weights = {i: 1.0/count for i, count in enumerate(counts)}
print (f"counts: {counts}\nweights: {class_weights}")计数:[350 350 350]
权重:{0: 0.002857142857142857, 1: 0.002857142857142857, 2: 0.002857142857142857}标准化数据
我们需要标准化我们的数据(零均值和单位方差),以便特定特征的大小不会影响模型如何学习其权重。我们只会对输入 X 进行标准化,因为我们的输出 y 是类值。我们将编写自己的StandardScaler类,以便稍后在推理过程中轻松保存和加载它。
class StandardScaler(object):
def __init__(self, mean=None, std=None):
self.mean = np.array(mean)
self.std = np.array(std)
def fit(self, X):
self.mean = np.mean(X_train, axis=0)
self.std = np.std(X_train, axis=0)
def scale(self, X):
return (X - self.mean) / self.std
def unscale(self, X):
return (X * self.std) + self.mean
def save(self, fp):
with open(fp, "w") as fp:
contents = {"mean": self.mean.tolist(), "std": self.std.tolist()}
json.dump(contents, fp, indent=4, sort_keys=False)
@classmethod
def load(cls, fp):
with open(fp, "r") as fp:
kwargs = json.load(fp=fp)
return cls(**kwargs)
# Standardize the data (mean=0, std=1) using training data
X_scaler = StandardScaler()
X_scaler.fit(X_train)
# Apply scaler on training and test data (don't standardize outputs for classification)
X_train = X_scaler.scale(X_train)
X_val = X_scaler.scale(X_val)
X_test = X_scaler.scale(X_test)# Check (means should be ~0 and std should be ~1)
print (f"X_test[0]: mean: {np.mean(X_test[:, 0], axis=0):.1f}, std: {np.std(X_test[:, 0], axis=0):.1f}")
print (f"X_test[1]: mean: {np.mean(X_test[:, 1], axis=0):.1f}, std: {np.std(X_test[:, 1], axis=0):.1f}")X_test[0]:平均值:0.1,标准:0.9
X_test[1]:平均值:0.0,标准:1.0数据加载器
我们将把我们的数据放入 aDataset并使用 aDataLoader来有效地创建用于训练和评估的批次。
import torch
# Seed seed for reproducibility
torch.manual_seed(SEED)class Dataset(torch.utils.data.Dataset):
def __init__(self, X, y):
self.X = X
self.y = y
def __len__(self):
return len(self.y)
def __str__(self):
return f""
def __getitem__(self, index):
X = self.X[index]
y = self.y[index]
return [X, y]
def collate_fn(self, batch):
"""Processing on a batch."""
# Get inputs
batch = np.array(batch)
X = np.stack(batch[:, 0], axis=0)
y = batch[:, 1]
# Cast
X = torch.FloatTensor(X.astype(np.float32))
y = torch.LongTensor(y.astype(np.int32))
return X, y
def create_dataloader(self, batch_size, shuffle=False, drop_last=False):
return torch.utils.data.DataLoader(
dataset=self, batch_size=batch_size, collate_fn=self.collate_fn,
shuffle=shuffle, drop_last=drop_last, pin_memory=True)
我们真的不需要collate_fn这里,但我们想让它透明,因为当我们想要对我们的批处理进行特定处理时(例如填充),我们将需要它。
# Create datasets
train_dataset = Dataset(X=X_train, y=y_train)
val_dataset = Dataset(X=X_val, y=y_val)
test_dataset = Dataset(X=X_test, y=y_test)
print ("Datasets:\n"
f" Train dataset:{train_dataset.__str__()}\n"
f" Val dataset: {val_dataset.__str__()}\n"
f" Test dataset: {test_dataset.__str__()}\n"
"Sample point:\n"
f" X: {train_dataset[0][0]}\n"
f" y: {train_dataset[0][1]}")
到目前为止,我们使用批量梯度下降来更新我们的权重。这意味着我们使用整个训练数据集计算了梯度。我们也可以使用随机梯度下降 (SGD) 更新我们的权重,我们一次传入一个训练示例。当前的标准是小批量梯度下降,它在批量和 SGD 之间取得平衡,我们使用 n ( BATCH_SIZE) 个样本的小批量更新权重。这是DataLoader对象派上用场的地方。
# Create dataloaders
batch_size = 64
train_dataloader = train_dataset.create_dataloader(batch_size=batch_size)
val_dataloader = val_dataset.create_dataloader(batch_size=batch_size)
test_dataloader = test_dataset.create_dataloader(batch_size=batch_size)
batch_X, batch_y = next(iter(train_dataloader))
print ("Sample batch:\n"
f" X: {list(batch_X.size())}\n"
f" y: {list(batch_y.size())}\n"
"Sample point:\n"
f" X: {batch_X[0]}\n"
f" y: {batch_y[0]}")样品批次:
X: [64, 2]
和: [64]
采样点:
X:张量([-1.4736,-1.6742])
和:0设备
到目前为止,我们一直在 CPU 上运行我们的操作,但是当我们有大型数据集和更大的模型要训练时,我们可以通过在 GPU 上并行化张量操作而受益。在此笔记本中,您可以通过转到下拉菜单中的Runtime> Change runtime type> 选择来使用 GPU。我们可以使用以下代码行使用什么设备:GPUHardware accelerator
# Set CUDA seeds
torch.cuda.manual_seed(SEED)
torch.cuda.manual_seed_all(SEED) # multi-GPU
# Device configuration
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print (device)模型
让我们初始化我们将用来展示训练实用程序功能的模型。
import math
from torch import nn
import torch.nn.functional as FINPUT_DIM = X_train.shape[1] # 2D
HIDDEN_DIM = 100
DROPOUT_P = 0.1
NUM_CLASSES = len(label_encoder.classes)
NUM_EPOCHS = 10class MLP(nn.Module):
def __init__(self, input_dim, hidden_dim, dropout_p, num_classes):
super(MLP, self).__init__()
self.fc1 = nn.Linear(input_dim, hidden_dim)
self.dropout = nn.Dropout(dropout_p)
self.fc2 = nn.Linear(hidden_dim, num_classes)
def forward(self, inputs):
x_in, = inputs
z = F.relu(self.fc1(x_in))
z = self.dropout(z)
z = self.fc2(z)
return z
# Initialize model
model = MLP(
input_dim=INPUT_DIM, hidden_dim=HIDDEN_DIM,
dropout_p=DROPOUT_P, num_classes=NUM_CLASSES)
model = model.to(device) # set device
print (model.named_parameters)培训
到目前为止,我们一直在编写仅使用训练数据拆分进行训练的训练循环,然后我们对测试集进行评估。但实际上,我们会遵循这个过程:
- 在训练数据拆分的一个时期使用小批量进行训练。
- 评估验证拆分的损失并使用它来调整超参数(例如学习率)。
- 训练结束后(通过停滞的改进、期望的性能等),在测试(保留)数据拆分上评估您的训练模型。
我们将创建一个Trainer类来组织所有这些过程。
该类中的第一个函数train_step将使用来自训练数据拆分的一个时期的批次训练模型。
def train_step(self, dataloader):
"""Train step."""
# Set model to train mode
self.model.train()
loss = 0.0
# Iterate over train batches
for i, batch in enumerate(dataloader):
# Step
batch = [item.to(self.device) for item in batch] # Set device
inputs, targets = batch[:-1], batch[-1]
self.optimizer.zero_grad() # Reset gradients
z = self.model(inputs) # Forward pass
J = self.loss_fn(z, targets) # Define loss
J.backward() # Backward pass
self.optimizer.step() # Update weights
# Cumulative Metrics
loss += (J.detach().item() - loss) / (i + 1)
return loss
接下来,我们将定义eval_step将用于处理验证和测试数据拆分的哪个。这是因为它们都不需要梯度更新并显示相同的指标。
def eval_step(self, dataloader):
"""Validation or test step."""
# Set model to eval mode
self.model.eval()
loss = 0.0
y_trues, y_probs = [], []
# Iterate over val batches
with torch.inference_mode():
for i, batch in enumerate(dataloader):
# Step
batch = [item.to(self.device) for item in batch] # Set device
inputs, y_true = batch[:-1], batch[-1]
z = self.model(inputs) # Forward pass
J = self.loss_fn(z, y_true).item()
# Cumulative Metrics
loss += (J - loss) / (i + 1)
# Store outputs
y_prob = F.softmax(z).cpu().numpy()
y_probs.extend(y_prob)
y_trues.extend(y_true.cpu().numpy())
return loss, np.vstack(y_trues), np.vstack(y_probs)最后一个函数是predict_step用于推理的函数。eval_step除了我们不计算任何指标外,它与 非常相似。我们传递可以用来生成性能分数的预测。
def predict_step(self, dataloader):
"""Prediction step."""
# Set model to eval mode
self.model.eval()
y_probs = []
# Iterate over val batches
with torch.inference_mode():
for i, batch in enumerate(dataloader):
# Forward pass w/ inputs
inputs, targets = batch[:-1], batch[-1]
z = self.model(inputs)
# Store outputs
y_prob = F.softmax(z).cpu().numpy()
y_probs.extend(y_prob)
return np.vstack(y_probs)LR调度器
随着我们的模型开始优化并表现更好,损失将减少,我们需要进行较小的调整。如果我们继续使用固定的学习率,我们就会来回过冲。因此,我们将在优化器中添加一个学习率调度程序,以在训练期间调整我们的学习率。有许多调度程序可供选择,但一种流行的调度程序是ReduceLROnPlateau在度量(例如验证损失)停止改进时降低学习率。factor=0.1在下面的示例中,当我们的兴趣指标( ) 连续三个 ( ) 时期self.scheduler.step(val_loss)停止下降 ( ) 时,我们将学习率降低 0.1 ( )。mode="min"patience=3
# Initialize the LR scheduler
scheduler = torch.optim.lr_scheduler.ReduceLROnPlateau(
optimizer, mode="min", factor=0.1, patience=3)
...
train_loop():
...
# Steps
train_loss = trainer.train_step(dataloader=train_dataloader)
val_loss, _, _ = trainer.eval_step(dataloader=val_dataloader)
self.scheduler.step(val_loss)
...提前停止
我们永远不应该为任意数量的 epoch 训练我们的模型,而是应该有明确的停止标准(即使你被计算资源引导)。常见的停止标准包括验证性能在某些时期 ( patience) 中停滞不前、达到预期性能等。
# Early stopping
if val_loss < best_val_loss:
best_val_loss = val_loss
best_model = trainer.model
_patience = patience # reset _patience
else:
_patience -= 1
if not _patience: # 0
print("Stopping early!")
break训练
现在让我们将所有这些放在一起来训练我们的模型。
from torch.optim import AdamLEARNING_RATE = 1e-2
NUM_EPOCHS = 100
PATIENCE = 3# Define Loss
class_weights_tensor = torch.Tensor(list(class_weights.values())).to(device)
loss_fn = nn.CrossEntropyLoss(weight=class_weights_tensor)# Define optimizer & scheduler
optimizer = Adam(model.parameters(), lr=LEARNING_RATE)
scheduler = torch.optim.lr_scheduler.ReduceLROnPlateau(
optimizer, mode="min", factor=0.1, patience=3)class Trainer(object):
def __init__(self, model, device, loss_fn=None, optimizer=None, scheduler=None):
# Set params
self.model = model
self.device = device
self.loss_fn = loss_fn
self.optimizer = optimizer
self.scheduler = scheduler
def train_step(self, dataloader):
"""Train step."""
# Set model to train mode
self.model.train()
loss = 0.0
# Iterate over train batches
for i, batch in enumerate(dataloader):
# Step
batch = [item.to(self.device) for item in batch] # Set device
inputs, targets = batch[:-1], batch[-1]
self.optimizer.zero_grad() # Reset gradients
z = self.model(inputs) # Forward pass
J = self.loss_fn(z, targets) # Define loss
J.backward() # Backward pass
self.optimizer.step() # Update weights
# Cumulative Metrics
loss += (J.detach().item() - loss) / (i + 1)
return loss
def eval_step(self, dataloader):
"""Validation or test step."""
# Set model to eval mode
self.model.eval()
loss = 0.0
y_trues, y_probs = [], []
# Iterate over val batches
with torch.inference_mode():
for i, batch in enumerate(dataloader):
# Step
batch = [item.to(self.device) for item in batch] # Set device
inputs, y_true = batch[:-1], batch[-1]
z = self.model(inputs) # Forward pass
J = self.loss_fn(z, y_true).item()
# Cumulative Metrics
loss += (J - loss) / (i + 1)
# Store outputs
y_prob = F.softmax(z).cpu().numpy()
y_probs.extend(y_prob)
y_trues.extend(y_true.cpu().numpy())
return loss, np.vstack(y_trues), np.vstack(y_probs)
def predict_step(self, dataloader):
"""Prediction step."""
# Set model to eval mode
self.model.eval()
y_probs = []
# Iterate over val batches
with torch.inference_mode():
for i, batch in enumerate(dataloader):
# Forward pass w/ inputs
inputs, targets = batch[:-1], batch[-1]
z = self.model(inputs)
# Store outputs
y_prob = F.softmax(z).cpu().numpy()
y_probs.extend(y_prob)
return np.vstack(y_probs)
def train(self, num_epochs, patience, train_dataloader, val_dataloader):
best_val_loss = np.inf
for epoch in range(num_epochs):
# Steps
train_loss = self.train_step(dataloader=train_dataloader)
val_loss, _, _ = self.eval_step(dataloader=val_dataloader)
self.scheduler.step(val_loss)
# Early stopping
if val_loss < best_val_loss:
best_val_loss = val_loss
best_model = self.model
_patience = patience # reset _patience
else:
_patience -= 1
if not _patience: # 0
print("Stopping early!")
break
# Logging
print(
f"Epoch: {epoch+1} | "
f"train_loss: {train_loss:.5f}, "
f"val_loss: {val_loss:.5f}, "
f"lr: {self.optimizer.param_groups[0]['lr']:.2E}, "
f"_patience: {_patience}"
)
return best_model
# Trainer module
trainer = Trainer(
model=model, device=device, loss_fn=loss_fn,
optimizer=optimizer, scheduler=scheduler)# Train
best_model = trainer.train(
NUM_EPOCHS, PATIENCE, train_dataloader, val_dataloader)Epoch: 1 | train_loss: 0.73999, val_loss: 0.58441, lr: 1.00E-02, _patience: 3
Epoch: 2 | train_loss: 0.52631, val_loss: 0.41542, lr: 1.00E-02, _patience: 3
Epoch: 3 | train_loss: 0.40919, val_loss: 0.30673, lr: 1.00E-02, _patience: 3
Epoch: 4 | train_loss: 0.31421, val_loss: 0.22428, lr: 1.00E-02, _patience: 3
...
Epoch: 48 | train_loss: 0.04100, val_loss: 0.02100, lr: 1.00E-02, _patience: 2
Epoch: 49 | train_loss: 0.04155, val_loss: 0.02008, lr: 1.00E-02, _patience: 3
Epoch: 50 | train_loss: 0.05295, val_loss: 0.02094, lr: 1.00E-02, _patience: 2
Epoch: 51 | train_loss: 0.04619, val_loss: 0.02179, lr: 1.00E-02, _patience: 1
Stopping early!评估
import json
from sklearn.metrics import precision_recall_fscore_supportdef get_metrics(y_true, y_pred, classes):
"""Per-class performance metrics."""
# Performance
performance = {"overall": {}, "class": {}}
# Overall performance
metrics = precision_recall_fscore_support(y_true, y_pred, average="weighted")
performance["overall"]["precision"] = metrics[0]
performance["overall"]["recall"] = metrics[1]
performance["overall"]["f1"] = metrics[2]
performance["overall"]["num_samples"] = np.float64(len(y_true))
# Per-class performance
metrics = precision_recall_fscore_support(y_true, y_pred, average=None)
for i in range(len(classes)):
performance["class"][classes[i]] = {
"precision": metrics[0][i],
"recall": metrics[1][i],
"f1": metrics[2][i],
"num_samples": np.float64(metrics[3][i]),
}
return performance
# Get predictions
test_loss, y_true, y_prob = trainer.eval_step(dataloader=test_dataloader)
y_pred = np.argmax(y_prob, axis=1)
# Determine performance
performance = get_metrics(
y_true=y_test, y_pred=y_pred, classes=label_encoder.classes)
print (json.dumps(performance["overall"], indent=2)){
“精度”:0.9956140350877193,
“召回”:0.9955555555555556,
“f1”:0.9955553580159119,
“num_samples”:225.0
}保存和加载
许多教程从未向您展示如何保存您创建的组件,以便您可以加载它们进行推理。
from pathlib import Path# Save artifacts
dir = Path("mlp")
dir.mkdir(parents=True, exist_ok=True)
label_encoder.save(fp=Path(dir, "label_encoder.json"))
X_scaler.save(fp=Path(dir, "X_scaler.json"))
torch.save(best_model.state_dict(), Path(dir, "model.pt"))
with open(Path(dir, 'performance.json'), "w") as fp:
json.dump(performance, indent=2, sort_keys=False, fp=fp)# Load artifacts
device = torch.device("cpu")
label_encoder = LabelEncoder.load(fp=Path(dir, "label_encoder.json"))
X_scaler = StandardScaler.load(fp=Path(dir, "X_scaler.json"))
model = MLP(
input_dim=INPUT_DIM, hidden_dim=HIDDEN_DIM,
dropout_p=DROPOUT_P, num_classes=NUM_CLASSES)
model.load_state_dict(torch.load(Path(dir, "model.pt"), map_location=device))
model.to(device)MLP(
(fc1): Linear(in_features=2, out_features=100, bias=True)
(dropout): Dropout(p=0.1, inplace=False)
(fc2): Linear(in_features=100, out_features=3, bias=True)
)# Initialize trainer
trainer = Trainer(model=model, device=device)# Dataloader
sample = [[0.106737, 0.114197]] # c1
X = X_scaler.scale(sample)
y_filler = label_encoder.encode([label_encoder.classes[0]]*len(X))
dataset = Dataset(X=X, y=y_filler)
dataloader = dataset.create_dataloader(batch_size=batch_size)# Inference
y_prob = trainer.predict_step(dataloader)
y_pred = np.argmax(y_prob, axis=1)
label_encoder.decode(y_pred)[“c1”]