基于pytorch的GAN网络搭建
本次的主要任务是利用pytorch实现对GAN网络的搭建,并实现对手写数字的生成。GAN网络主要包含两部分网络,一部分是生成器,一部分是判别器。本次采用的数据库还是MNIST数据集,这里对数据的获取不在赘述。
1、生成器
生成器的主要功能是生成我们所需要的样本,这里是28*28的图片。首先生成长度为100的高斯噪声,并且将噪声通过线性模型升维到784维。激活函数采用Relu。
# 定义判别器 #####Generator######使用多层网络来作为判别器
# 输入一个100维的0~1之间的高斯分布,多层映射到784维
class generator(nn.Module):
def __init__(self):
super(generator, self).__init__()
self.gen = nn.Sequential(
nn.Linear(100, 256), # 用线性变换将输入映射到256维
nn.ReLU(True), # relu激活
nn.Linear(256, 512), # 线性变换
nn.ReLU(True), # relu激活
nn.Linear(512, 784), # 线性变换
nn.Tanh() # Tanh激活使得生成数据分布在【-1,1】之间,因为输入的真实数据的经过transforms之后也是这个分布
)
def forward(self, x):
x = self.gen(x)
return x2、判别器
识别器的主要功能是分辨真实图片与构造的图片,实际上就是一个二分类问题,这里采用全连接网络提取特征并进行二分类,也可以利用CNN、LSTM等网络进行特征提取。
# 定义判别器 #####Discriminator######使用多层网络来作为判别器
# 将图片利用LeNet网络进行二分类,判断图片是真实的还是生成的
class discriminator(nn.Module):
def __init__(self):
super(discriminator, self).__init__()
self.f1 = nn.Sequential(
nn.Linear(784, 512),
nn.LeakyReLU(0.2)
)
self.f2 = nn.Sequential(
nn.Linear(512, 256),
nn.LeakyReLU(0.2)
)
self.out = nn.Sequential(
nn.Linear(256, 1),
nn.Sigmoid()
)
def forward(self, x):
x = self.f1(x)
x = self.f2(x)
x = self.out(x)
return x
3、定义损失函数
(1)判别器损失
判别器主要实现对真假样本的分类,因此需要将真的图片判断为真,假的图片判断为假。因此需要分别计算两种情况的损失函数相加。
# ########判别器训练train#####################
# 分为两部分:1、真的图像判别为真;2、假的图像判别为假
# 计算真实图片的损失
real_out = self.D(real_img) # 将真实图片放入判别器中
d_loss_real = self.criterion(real_out, real_label) # 得到真实图片的loss
real_scores = real_out # 得到真实图片的判别值,输出的值越接近1越好
# 计算假的图片的损失
z = Variable(torch.randn(num_img, Config.z_dim)).cuda() # 随机生成一些噪声
fake_img = self.G(z).detach() # 随机噪声放入生成网络中,生成一张假的图片。 # 避免梯度传到G,因为G不用更新, detach分离
fake_out = self.D(fake_img) # 判别器判断假的图片,
d_loss_fake = self.criterion(fake_out, fake_label) # 得到假的图片的loss
fake_scores = fake_out # 得到假图片的判别值,对于判别器来说,假图片的损失越接近0越好
# 损失函数和优化
d_loss = d_loss_real + d_loss_fake # 损失包括判真损失和判假损失
self.d_optimizer.zero_grad() # 在反向传播之前,先将梯度归0
d_loss.backward() # 将误差反向传播
self.d_optimizer.step() # 更新参数(2)生成器损失
# ==================训练生成器============================
# ###############################生成网络的训练
# 希望生成的图片被认为是真的照片,因此需要假图片对应真label的损失,并且更新生成器的参数
z = Variable(torch.randn(num_img, Config.z_dim)).cuda() # 得到随机噪声
fake_img = self.G(z) # 随机噪声输入到生成器中,得到一副假的图片
output = self.D(fake_img) # 经过判别器得到的结果
g_loss = self.criterion(output, real_label) # 得到的假的图片与真实的图片的label的loss
# bp and optimize
self.g_optimizer.zero_grad() # 梯度归0
g_loss.backward() # 进行反向传播
self.g_optimizer.step() # .step()一般用在反向传播后面,用于更新生成网络的参数4、训练模型
import torch
from torchvision import datasets, transforms
import torch.nn as nn
from torch.autograd import Variable
from torchvision.utils import save_image
import os
class Config:
device = torch.device('cuda:0')
batch_size = 128
epoch = 100
alpha = 3e-4
print_per_step = 100 # 控制输出
z_dim = 100
# 定义判别器 #####Discriminator######使用多层网络来作为判别器
# 将图片利用LeNet网络进行二分类,判断图片是真实的还是生成的
class discriminator(nn.Module):
def __init__(self):
super(discriminator, self).__init__()
self.f1 = nn.Sequential(
nn.Linear(784, 512),
nn.LeakyReLU(0.2)
)
self.f2 = nn.Sequential(
nn.Linear(512, 256),
nn.LeakyReLU(0.2)
)
self.out = nn.Sequential(
nn.Linear(256, 1),
nn.Sigmoid()
)
def forward(self, x):
x = self.f1(x)
x = self.f2(x)
x = self.out(x)
return x
# 定义判别器 #####Generator######使用多层网络来作为判别器
# 输入一个100维的0~1之间的高斯分布,多层映射到784维
class generator(nn.Module):
def __init__(self):
super(generator, self).__init__()
self.gen = nn.Sequential(
nn.Linear(100, 256), # 用线性变换将输入映射到256维
nn.ReLU(True), # relu激活
nn.Linear(256, 512), # 线性变换
nn.ReLU(True), # relu激活
nn.Linear(512, 784), # 线性变换
nn.Tanh() # Tanh激活使得生成数据分布在【-1,1】之间,因为输入的真实数据的经过transforms之后也是这个分布
)
def forward(self, x):
x = self.gen(x)
return x
class TrainProcess:
def __init__(self):
self.data = self.load_data()
self.D = discriminator().to(Config.device)
self.G = generator().to(Config.device)
self.criterion = nn.BCELoss() # 定义损失函数
self.d_optimizer = torch.optim.Adam(self.D.parameters(), lr=Config.alpha)
self.g_optimizer = torch.optim.Adam(self.G.parameters(), lr=Config.alpha)
@staticmethod
def load_data():
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.5,), (0.5,)) # (x-mean) / std
])
data = datasets.MNIST(root='./data/',
train=True,
transform=transform,
download=True)
# 返回一个数据迭代器
# shuffle:是否打乱顺序
data_loader = torch.utils.data.DataLoader(dataset=data,
batch_size=Config.batch_size,
shuffle=True)
return data_loader
@staticmethod
def to_img(x):
out = 0.5 * (x + 1)
out = out.clamp(0, 1) # Clamp函数可以将随机变化的数值限制在一个给定的区间[min, max]内:
out = out.view(-1, 1, 28, 28) # view()函数作用是将一个多行的Tensor,拼接成一行
return out
def train_step(self):
# ##########################进入训练##判别器的判断过程#####################
for epoch in range(Config.epoch): # 进行多个epoch的训练
for i, (img, _) in enumerate(self.data):
num_img = img.size(0)
# view()函数作用是将一个多行的Tensor,拼接成一行
# 第一个参数是要拼接的tensor,第二个参数是-1
# =============================训练判别器==================
img = img.view(num_img,-1)
real_img = Variable(img).cuda() # 将tensor变成Variable放入计算图中
real_label = Variable(torch.ones(num_img)).cuda() # 定义真实的图片label为1
fake_label = Variable(torch.zeros(num_img)).cuda() # 定义假的图片的label为0
# ########判别器训练train#####################
# 分为两部分:1、真的图像判别为真;2、假的图像判别为假
# 计算真实图片的损失
real_out = self.D(real_img) # 将真实图片放入判别器中
d_loss_real = self.criterion(real_out, real_label) # 得到真实图片的loss
real_scores = real_out # 得到真实图片的判别值,输出的值越接近1越好
# 计算假的图片的损失
z = Variable(torch.randn(num_img, Config.z_dim)).cuda() # 随机生成一些噪声
fake_img = self.G(z).detach() # 随机噪声放入生成网络中,生成一张假的图片。 # 避免梯度传到G,因为G不用更新, detach分离
fake_out = self.D(fake_img) # 判别器判断假的图片,
d_loss_fake = self.criterion(fake_out, fake_label) # 得到假的图片的loss
fake_scores = fake_out # 得到假图片的判别值,对于判别器来说,假图片的损失越接近0越好
# 损失函数和优化
d_loss = d_loss_real + d_loss_fake # 损失包括判真损失和判假损失
self.d_optimizer.zero_grad() # 在反向传播之前,先将梯度归0
d_loss.backward() # 将误差反向传播
self.d_optimizer.step() # 更新参数
# ==================训练生成器============================
# ###############################生成网络的训练###############################
# 原理:目的是希望生成的假的图片被判别器判断为真的图片,
# 在此过程中,将判别器固定,将假的图片传入判别器的结果与真实的label对应,
# 反向传播更新的参数是生成网络里面的参数,
# 这样可以通过更新生成网络里面的参数,来训练网络,使得生成的图片让判别器以为是真的
# 这样就达到了对抗的目的
# 计算假的图片的损失
z = Variable(torch.randn(num_img, Config.z_dim)).cuda() # 得到随机噪声
fake_img = self.G(z) # 随机噪声输入到生成器中,得到一副假的图片
output = self.D(fake_img) # 经过判别器得到的结果
g_loss = self.criterion(output, real_label) # 得到的假的图片与真实的图片的label的loss
# bp and optimize
self.g_optimizer.zero_grad() # 梯度归0
g_loss.backward() # 进行反向传播
self.g_optimizer.step() # .step()一般用在反向传播后面,用于更新生成网络的参数
# 打印中间的损失
if (i + 1) % 100 == 0:
print('Epoch[{}/{}],d_loss:{:.6f},g_loss:{:.6f} '
'D real: {:.6f},D fake: {:.6f}'.format(
epoch, Config.epoch, d_loss.data.item(), g_loss.data.item(),
real_scores.data.mean(), fake_scores.data.mean() # 打印的是真实图片的损失均值
))
if epoch == 0:
real_images = self.to_img(real_img.cpu().data)
save_image(real_images, './img/real_images.png')
fake_images = self.to_img(fake_img.cpu().data)
save_image(fake_images, './img/fake_images-{}.png'.format(epoch + 1))
if __name__ == "__main__":
# 创建文件夹
if not os.path.exists('./img'):
os.mkdir('./img')
p = TrainProcess()
p.train_step()结果展示:

真实样本 训练1个epoch生成的样本
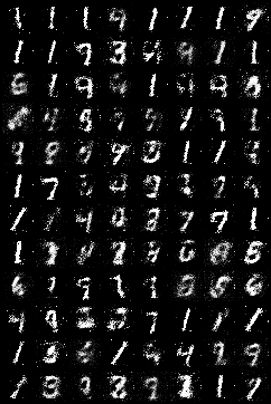
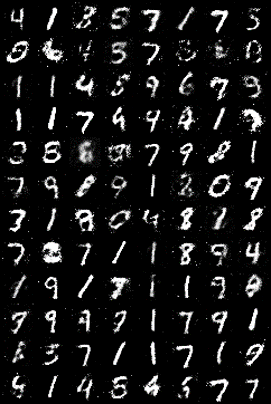
训练50个epoch生成的样本 训练100个epoch生成的样本