嵌入式分享合集62
一、何配置HAL库
相比较早几年使用标准库开发来讲,最近几年HAL库的使用是越来越多,那么我们开发应当使用哪一种呢,本文着重介绍常用的几种开发方式及相互之间的区别,白猫也好、黑猫也好,抓到耗子就是好猫。
STM32三种开发方式
通常新手在入门STM32的时候,首先都要先选择一种要用的开发方式,不同的开发方式会导致你编程的架构是完全不一样的。一般大多数都会选用标准库和HAL库,而极少部分人会通过直接配置寄存器进行开发。
网上关于标准库、HAL库的描述相信是数不胜数。可是一个对于很多刚入门的朋友还是没法很直观的去真正了解这些不同开发发方式彼此之间的区别,所以笔者想以一种非常直白的方式,用自己的理解去将这些东西表述出来,如果有描述的不对的地方或者是不同意见的也可以大家提出。
1、直接配置寄存器
不少先学了51的朋友可能会知道,会有一小部分人或是教程是通过汇编语言直接操作寄存器实现功能的,这种方法到了STM32就变得不太容易行得通了,因为STM32的寄存器数量是51单片机的十数倍,如此多的寄存器根本无法全部记忆,开发时需要经常的翻查芯片的数据手册,此时直接操作寄存器就变得非常的费力了。但还是会有很小一部分人,喜欢去直接操作寄存器,因为这样更接近原理,知其然也知其所以然。
2、标准库
上面也提到了,STM32有非常多的寄存器,而导致了开发困难,所以为此ST公司就为每款芯片都编写了一份库文件,也就是工程文件里stm32F1xx…之类的。在这些 .c .h文件中,包括一些常用量的宏定义,把一些外设也通过结构体变量封装起来,如GPIO口时钟等。所以我们只需要配置结构体变量成员就可以修改外设的配置寄存器,从而选择不同的功能。也是目前最多人使用的方式,也是学习STM32接触最多的一种开发方式,我也就不多阐述了。
3、HAL库
HAL库是ST公司目前主力推的开发方式,全称就是Hardware Abstraction Layer(抽象印象层)。库如其名,很抽象,一眼看上去不太容易知道他的作用是什么。
它的出现比标准库要晚,但其实和标准库一样,都是为了节省程序开发的时期,而且HAL库尤其的有效,如果说标准库把实现功能需要配置的寄存器集成了,那么HAL库的一些函数甚至可以做到某些特定功能的集成。也就是说,同样的功能,标准库可能要用几句话,HAL库只需用一句话就够了。
并且HAL库也很好的解决了程序移植的问题,不同型号的stm32芯片它的标准库是不一样的,例如在F4上开发的程序移植到F3上是不能通用的,而使用HAL库,只要使用的是相通的外设,程序基本可以完全复制粘贴,注意是相通外设,意思也就是不能无中生有,例如F7比F3要多几个定时器,不能明明没有这个定时器却非要配置,但其实这种情况不多,绝大多数都可以直接复制粘贴。是而且使用ST公司研发的STMcube软件,可以通过图形化的配置功能,直接生成整个使用HAL库的工程文件,可以说是方便至极,但是方便的同时也造成了它执行效率的低下,在各种论坛帖子真的是被吐槽的数不胜数。
HAL库固件库安装与用户手册
1、首先设置让Cube可以自动联网下载相关固件库选择updater Settings
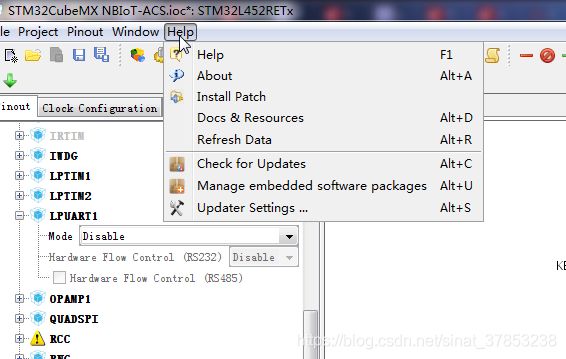
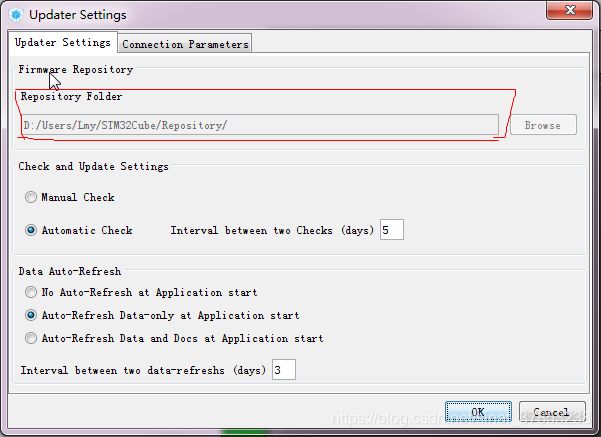
设置如下

2、根据芯片选择所需固件
版本是向下兼容的,可以直接选择最新版。但如果觉得最新版太大,可以阅读下面的Main Changes.能够支持你目前的芯片就好。

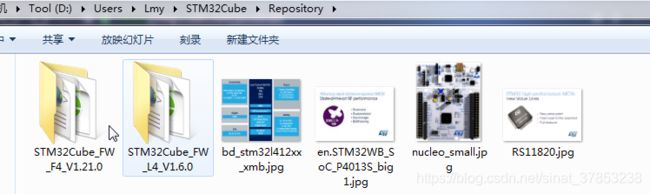
选好了,点击Install Now就行,过程可能有点长。建议直接官网下载到本地,再安装文件会被下载到如下位置,建议更改此目录,不要选在C盘!!!
3、寻找用户帮助手册
进入固件所在文件夹,里面包含很多内容。
比如说 官方提供的开发板程序,每个型号下面都有对应功能的实现,用户手册就在Drivers文件夹下面。
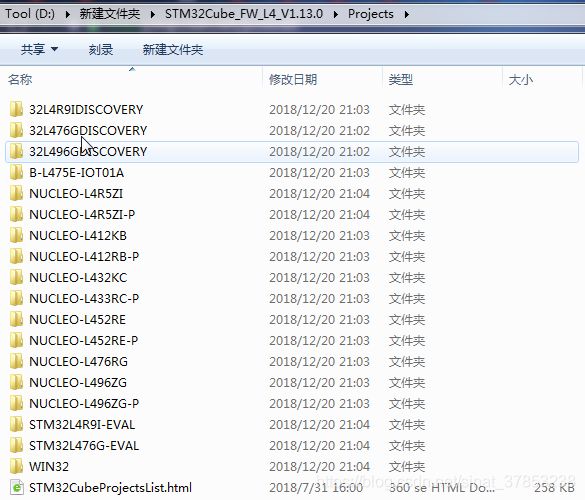
用户手册就在Drivers文件夹下面。

STM32 HAL库与标准库的区别
1、句柄
句柄(handle),有多种意义,其中第一种是指程序设计,第二种是指Windows编程。现在大部分都是指程序设计/程序开发这类。
-
第一种解释:句柄是一种特殊的智能指针 。当一个应用程序要引用其他系统(如数据库、操作系统)所管理的内存块或对象时,就要使用句柄。
-
第二种解释:整个Windows编程的基础。一个句柄是指使用的一个唯一的整数值,即一个4字节(64位程序中为8字节)长的数值,来标识应用程序中的不同对象和同类中的不同的实例,诸如,一个窗口,按钮,图标,滚动条,输出设备,控件或者文件等。应用程序能够通过句柄访问相应的对象的信息,但是句柄不是指针,程序不能利用句柄来直接阅读文件中的信息。如果句柄不在I/O文件中,它是毫无用处的。句柄是Windows用来标志应用程序中建立的或是使用的唯一整数,Windows大量使用了句柄来标识对象。
STM32的标准库中,句柄是一种特殊的指针,通常指向结构体!
在STM32的标准库中,假设我们要初始化一个外设(这里以USART为例),我们首先要初始化他们的各个寄存器。在标准库中,这些操作都是利用固件库结构体变量+固件库Init函数实现的:
USART_InitTypeDef USART_InitStructure;USART_InitStructure.USART_BaudRate = bound;//串口波特率USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式USART_Init(USART3, &USART_InitStructure); //初始化串口1
可以看到,要初始化一个串口,需要:
-
1、对六个位置进行赋值
-
2、然后引用Init函数
USART_InitStructure并不是一个全局结构体变量,而是只在函数内部的局部变量,初始化完成之后,USART_InitStructure就失去了作用。而在HAL库中,同样是USART初始化结构体变量,我们要定义为全局变量。
UART_HandleTypeDef UART1_Handler;结构体成员
typedef struct{USART_TypeDef *Instance; /*!< UART registers base address */UART_InitTypeDef Init; /*!< UART communication parameters */uint8_t *pTxBuffPtr; /*!< Pointer to UART Tx transfer Buffer */uint16_t TxXferSize; /*!< UART Tx Transfer size */uint16_t TxXferCount; /*!< UART Tx Transfer Counter */uint8_t *pRxBuffPtr; /*!< Pointer to UART Rx transfer Buffer */uint16_t RxXferSize; /*!< UART Rx Transfer size */uint16_t RxXferCount; /*!< UART Rx Transfer Counter */DMA_HandleTypeDef *hdmatx; /*!< UART Tx DMA Handle parameters */DMA_HandleTypeDef *hdmarx; /*!< UART Rx DMA Handle parameters */HAL_LockTypeDef Lock; /*!< Locking object */__IO HAL_UART_StateTypeDef State; /*!< UART communication state */__IO uint32_t ErrorCode; /*!< UART Error code */}UART_HandleTypeDef;
我们发现,与标准库不同的是,该成员不仅:
-
1、包含了之前标准库就有的六个成员(波特率,数据格式等),
-
2、还包含过采样、(发送或接收的)数据缓存、数据指针、串口 DMA 相关的变量、各种标志位等等要在整个项目流程中都要设置的各个成员。
该 UART1_Handler就被称为串口的句柄,它被贯穿整个USART收发的流程,比如开启中断
HAL_UART_Receive_IT(&UART1_Handler, (u8 *)aRxBuffer, RXBUFFERSIZE);比如后面要讲到的MSP与Callback回调函数:
void HAL_UART_MspInit(UART_HandleTypeDef *huart);void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);
在这些函数中,只需要调用初始化时定义的句柄UART1_Handler就好。
2、MSP函数
MSP: MCU Specific Package 单片机的具体方案
MSP是指和MCU相关的初始化,引用一下正点原子的解释,个人觉得说的很明白:
我们要初始化一个串口,首先要设置和 MCU 无关的东西,例如波特率,奇偶校验,停止位等,这些参数设置和 MCU 没有任何关系,可以使用 STM32F1,也可以是 STM32F2/F3/F4/F7上的串口。而一个串口设备它需要一个 MCU 来承载,例如用 STM32F4 来做承载,PA9 做为发送,PA10 做为接收,MSP 就是要初始化 STM32F4 的 PA9,PA10,配置这两个引脚。所以 HAL驱动方式的初始化流程就是:
-
HAL_USART_Init()—>HAL_USART_MspInit() ,先初始化与 MCU无关的串口协议,再初始化与 MCU 相关的串口引脚。
-
在 STM32 的 HAL 驱动中HAL_PPP_MspInit()作为回调,被 HAL_PPP_Init()函数所调用。当我们需要移植程序到 STM32F1平台的时候,我们只需要修改 HAL_PPP_MspInit 函数内容而不需要修改 HAL_PPP_Init 入口参数内容。
在HAL库中,几乎每初始化一个外设就需要设置该外设与单片机之间的联系,比如IO口,是否复用等等,可见,HAL库相对于标准库多了MSP函数之后,移植性非常强,但与此同时却增加了代码量和代码的嵌套层级。可以说各有利弊。
同样,MSP函数又可以配合句柄,达到非常强的移植性:
void HAL_UART_MspInit(UART_HandleTypeDef *huart);3、Callback函数
类似于MSP函数,个人认为Callback函数主要帮助用户应用层的代码编写。
还是以USART为例,在标准库中,串口中断了以后,我们要先在中断中判断是否是接收中断,然后读出数据,顺便清除中断标志位,然后再是对数据的处理,这样如果我们在一个中断函数中写这么多代码,就会显得很混乱:
void USART3_IRQHandler(void) //串口1中断服务程序{u8 Res;if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾){Res =USART_ReceiveData(USART3); //读取接收到的数据/*数据处理区*/}}}
而在HAL库中,进入串口中断后,直接由HAL库中断函数进行托管:
void USART1_IRQHandler(void){HAL_UART_IRQHandler(&UART1_Handler); //调用HAL库中断处理公用函数/***************省略无关代码****************/}
HAL_UART_IRQHandler这个函数完成了判断是哪个中断(接收?发送?或者其他?),然后读出数据,保存至缓存区,顺便清除中断标志位等等操作。
比如我提前设置了,串口每接收五个字节,我就要对这五个字节进行处理。在一开始我定义了一个串口接收缓存区:
/*HAL库使用的串口接收缓冲,处理逻辑由HAL库控制,接收完这个数组就会调用HAL_UART_RxCpltCallback进行处理这个数组*//*RXBUFFERSIZE=5*/u8 aRxBuffer[RXBUFFERSIZE];
在初始化中,我在句柄里设置好了缓存区的地址,缓存大小(五个字节)
/*该代码在HAL_UART_Receive_IT函数中,初始化时会引用*/huart->pRxBuffPtr = pData;//aRxBufferhuart->RxXferSize = Size;//RXBUFFERSIZEhuart->RxXferCount = Size;//RXBUFFERSIZE
则在接收数据中,每接收完五个字节,HAL_UART_IRQHandler才会执行一次Callback函数:
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);在这个Callback回调函数中,我们只需要对这接收到的五个字节(保存在aRxBuffer[]中)进行处理就好了,完全不用再去手动清除标志位等操作。
所以说Callback函数是一个应用层代码的函数,我们在一开始只设置句柄里面的各个参数,然后就等着HAL库把自己安排好的代码送到手中就可以了~
综上,就是HAL库的三个与标准库不同的地方之个人见解。个人觉得从这三个小点就可以看出HAL库的可移植性之强大,并且用户可以完全不去理会底层各个寄存器的操作,代码也更有逻辑性。但与此带来的是复杂的代码量,极慢的编译速度,略微低下的效率。看怎么取舍了。
STM32 HAL库结构
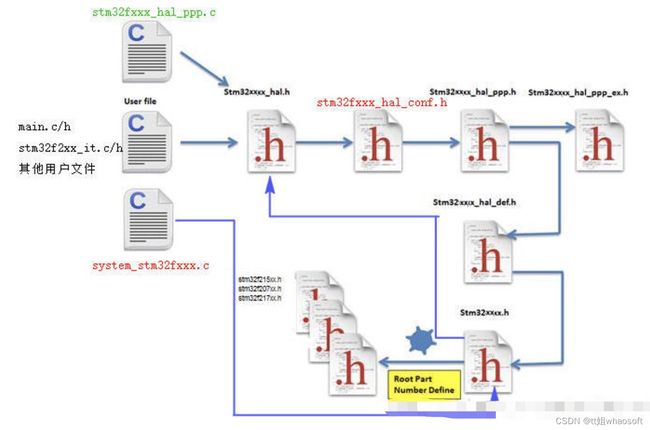
说到STM32的HAL库,就不得不提STM32CubeMX,其作为一个可视化的配置工具,对于开发者来说,确实大大节省了开发时间。STM32CubeMX就是以HAL库为基础的,且目前仅支持HAL库及LL库!首先看一下,官方给出的HAL库的包含结构:
-
1、stm32f4xx.h主要包含STM32同系列芯片的不同具体型号的定义,是否使用HAL库等的定义,接着,其会根据定义的芯片信号包含具体的芯片型号的头文件:
#if defined(STM32F405xx)#include "stm32f405xx.h"#elif defined(STM32F415xx)#include "stm32f415xx.h"#elif defined(STM32F407xx)#include "stm32f407xx.h"#elif defined(STM32F417xx)#include "stm32f417xx.h"#else#error "Please select first the target STM32F4xx device used in your application (in stm32f2xx.h file)"#endif
紧接着,其会包含stm32f4xx_hal.h。
-
2、stm32f4xx_hal.h:stm32f4xx_hal.c/h 主要实现HAL库的初始化、系统滴答相关函数、及CPU的调试模式配置
-
3、stm32f4xx_hal_conf.h :该文件是一个用户级别的配置文件,用来实现对HAL库的裁剪,其位于用户文件目录,不要放在库目录中。
接下来对于HAL库的源码文件进行一下说明,HAL库文件名均以stm32f4xx_hal开头,后面加上_外设或者模块名(如:stm32f4xx_hal_adc.c):
-
4、库文件:stm32f4xx_hal_ppp.c/.h // 主要的外设或者模块的驱动源文件,包含了该外设的通用API
stm32f4xx_hal_ppp_ex.c/.h // 外围设备或模块驱动程序的扩展文件。这组文件中包含特定型号或者系列的芯片的特殊API。以及如果该特定的芯片内部有不同的实现方式,则该文件中的特殊API将覆盖_ppp中的通用API。
stm32f4xx_hal.c/.h // 此文件用于HAL初始化,并且包含DBGMCU、重映射和基于systick的时间延迟等相关的API
-
5、其他库文件
用户级别文件:
stm32f4xx_hal_msp_template.c // 只有.c没有.h。它包含用户应用程序中使用的外设的MSP初始化和反初始化(主程序和回调函数)。使用者复制到自己目录下使用模板。
stm32f4xx_hal_conf_template.h // 用户级别的库配置文件模板。使用者复制到自己目录下使用
system_stm32f4xx.c // 此文件主要包含SystemInit()函数,该函数在刚复位及跳到main之前的启动过程中被调用。它不在启动时配置系统时钟(与标准库相反)。时钟的配置在用户文件中使用HAL API来完成。startup_stm32f4xx.s // 芯片启动文件,主要包含堆栈定义,终端向量表等 stm32f4xx_it.c/.h // 中断处理函数的相关实现
-
6 main.c/.h //
根据HAL库的命名规则,其API可以分为以下三大类:
-
初始化/反初始化函数:
HAL_PPP_Init(), HAL_PPP_DeInit()-
IO 操作函数:
HAL_PPP_Read(),HAL_PPP_Write(),HAL_PPP_Transmit(),HAL_PPP_Receive()
-
控制函数:
HAL_PPP_Set (),HAL_PPP_Get ().
-
状态和错误:
** HAL_PPP_GetState (),HAL_PPP_GetError ().
-
注意:
目前LL库是和HAL库捆绑发布的,所以在HAL库源码中,还有一些名为 stm32f2xx_ll_ppp的源码文件,这些文件就是新增的LL库文件。使用CubeMX生产项目时,可以选择LL库。
HAL库最大的特点就是对底层进行了抽象。在此结构下,用户代码的处理主要分为三部分:
-
处理外设句柄(实现用户功能)
-
处理MSP
-
处理各种回调函数
相关知识如下:
1、外设句柄定义
用户代码的第一大部分:对于外设句柄的处理。HAL库在结构上,对每个外设抽象成了一个称为ppp_HandleTypeDef的结构体,其中ppp就是每个外设的名字。*所有的函数都是工作在ppp_HandleTypeDef指针之下。
-
-
多实例支持:每个外设/模块实例都有自己的句柄。因此,实例资源是独立的
-
-
下面,以ADC为例
-
外围进程相互通信:该句柄用于管理进程例程之间的共享数据资源。
-
/*** @brief ADC handle Structure definition*/typedef struct{ADC_TypeDef *Instance; /*!< Register base address */ADC_InitTypeDef Init; /*!< ADC required parameters */__IO uint32_t NbrOfCurrentConversionRank; /*!< ADC number of current conversion rank */DMA_HandleTypeDef *DMA_Handle; /*!< Pointer DMA Handler */HAL_LockTypeDef Lock; /*!< ADC locking object */__IO uint32_t State; /*!< ADC communication state */__IO uint32_t ErrorCode; /*!< ADC Error code */}ADC_HandleTypeDef;
从上面的定义可以看出,ADC_HandleTypeDef中包含了ADC可能出现的所有定义,对于用户想要使用ADC只要定义一个ADC_HandleTypeDef的变量,给每个变量赋好值,对应的外设就抽象完了。接下来就是具体使用了。
当然,对于那些共享型外设或者说系统外设来说,他们不需要进行以上这样的抽象,这些部分与原来的标准外设库函数基本一样。例如以下外设:
-
GPIO
-
SYSTICK
-
NVIC
-
RCC
-
FLASH
以GPIO为例,对于HAL_GPIO_Init() 函数,其只需要GPIO 地址以及其初始化参数即可。
2、 三种编程方式
HAL库对所有的函数模型也进行了统一。在HAL库中,支持三种编程模式:轮询模式、中断模式、DMA模式(如果外设支持)。其分别对应如下三种类型的函数(以ADC为例):
HAL_StatusTypeDef HAL_ADC_Start(ADC_HandleTypeDef* hadc);HAL_StatusTypeDef HAL_ADC_Stop(ADC_HandleTypeDef* hadc);HAL_StatusTypeDef HAL_ADC_Start_IT(ADC_HandleTypeDef* hadc);HAL_StatusTypeDef HAL_ADC_Stop_IT(ADC_HandleTypeDef* hadc);HAL_StatusTypeDef HAL_ADC_Start_DMA(ADC_HandleTypeDef* hadc, uint32_t* pData, uint32_t Length);HAL_StatusTypeDef HAL_ADC_Stop_DMA(ADC_HandleTypeDef* hadc);
其中,带_IT的表示工作在中断模式下;带_DMA的工作在DMA模式下(注意:DMA模式下也是开中断的);什么都没带的就是轮询模式(没有开启中断的)。至于使用者使用何种方式,就看自己的选择了。
此外,新的HAL库架构下统一采用宏的形式对各种中断等进行配置(原来标准外设库一般都是各种函数)。针对每种外设主要由以下宏:
__HAL_PPP_ENABLE_IT(HANDLE, INTERRUPT):使能一个指定的外设中断__HAL_PPP_DISABLE_IT(HANDLE, INTERRUPT):失能一个指定的外设中断__HAL_PPP_GET_IT (HANDLE, __ INTERRUPT __):获得一个指定的外设中断状态__HAL_PPP_CLEAR_IT (HANDLE, __ INTERRUPT __):清除一个指定的外设的中断状态__HAL_PPP_GET_FLAG (HANDLE, FLAG):获取一个指定的外设的标志状态__HAL_PPP_CLEAR_FLAG (HANDLE, FLAG):清除一个指定的外设的标志状态__HAL_PPP_ENABLE(HANDLE) :使能外设__HAL_PPP_DISABLE(HANDLE) :失能外设__HAL_PPP_XXXX (HANDLE, PARAM) :指定外设的宏定义_HAL_PPP_GET IT_SOURCE (HANDLE, __ INTERRUPT __):检查中断源
3、 三大回调函数
在HAL库的源码中,到处可见一些以__weak开头的函数,而且这些函数,有些已经被实现了,比如:
__weak HAL_StatusTypeDef HAL_InitTick(uint32_t TickPriority){/*Configure the SysTick to have interrupt in 1ms time basis*/HAL_SYSTICK_Config(SystemCoreClock/1000U);/*Configure the SysTick IRQ priority */HAL_NVIC_SetPriority(SysTick_IRQn, TickPriority ,0U);/* Return function status */return HAL_OK;}
有些则没有被实现,例如:
__weak void HAL_SPI_TxCpltCallback(SPI_HandleTypeDef *hspi){/* Prevent unused argument(s) compilation warning */UNUSED(hspi);/* NOTE : This function should not be modified, when the callback is needed,the HAL_SPI_TxCpltCallback should be implemented in the user file*/}
所有带有__weak关键字的函数表示,就可以由用户自己来实现。如果出现了同名函数,且不带__weak关键字,那么连接器就会采用外部实现的同名函数。
通常来说,HAL库负责整个处理和MCU外设的处理逻辑,并将必要部分以回调函数的形式给出到用户,用户只需要在对应的回调函数中做修改即可。HAL库包含如下三种用户级别回调函数(PPP为外设名):
-
1、外设系统级初始化/解除初始化回调函数(用户代码的第二大部分:对于MSP的处理):
HAL_PPP_MspInit()和 HAL_PPP_MspDeInit**
例如:
__weak void HAL_SPI_MspInit(SPI_HandleTypeDef *hspi)。
在HAL_PPP_Init() 函数中被调用,用来初始化底层相关的设备(GPIOs, clock, DMA, interrupt)
-
2、处理完成回调函数:HAL_PPP_ProcessCpltCallback*(Process指具体某种处理,如UART的Tx),
例如:
__weak void HAL_SPI_RxCpltCallback(SPI_HandleTypeDef *hspi)当外设或者DMA工作完成后时,触发中断,该回调函数会在外设中断处理函数或者DMA的中断处理函数中被调用错误处理回调函数:
HAL_PPP_ErrorCallback例如:
__weak void HAL_SPI_ErrorCallback(SPI_HandleTypeDef hspi)*-
3、当外设或者DMA出现错误时,触发终端,该回调函数会在外设中断处理函数或者DMA的中断处理函数中被调用
错误处理回调函数:
HAL_PPP_ErrorCallback例如:
__weak void HAL_SPI_ErrorCallback(SPI_HandleTypeDef hspi)*当外设或者DMA出现错误时,触发终端,该回调函数会在外设中断处理函数或者DMA的中断处理函数中被调用。
绝大多数用户代码均在以上三大回调函数中实现。
HAL库结构中,在每次初始化前(尤其是在多次调用初始化前),先调用对应的反初始化(DeInit)函数是非常有必要的。
某些外设多次初始化时不调用返回会导致初始化失败。完成回调函数有多中,例如串口的完成回调函数有
HAL_UART_TxCpltCallbackHAL_UART_TxHalfCpltCallback
(用户代码的第三大部分:对于上面第二点和第三点的各种回调函数的处理)在实际使用中,发现HAL仍有不少问题,例如在使用USB时,其库配置存在问题。
HAL库移植使用
基本步骤:
-
1、复制stm32f2xx_hal_msp_template.c,参照该模板,依次实现用到的外设的HAL_PPP_MspInit()和 HAL_PPP_MspDeInit。
-
2、复制stm32f2xx_hal_conf_template.h,用户可以在此文件中自由裁剪,配置HAL库。
-
3、在使用HAL库时,必须先调用函数:HAL_StatusTypeDef HAL_Init(void)(该函数在stm32f2xx_hal.c中定义,也就意味着第一点中,必须首先实现HAL_MspInit(void)和HAL_MspDeInit(void))
-
4、HAL库与STD库不同,HAL库使用RCC中的函数来配置系统时钟,用户需要单独写时钟配置函数(STD库默认在system_stm32f2xx.c中)
-
5、关于中断,HAL提供了中断处理函数,只需要调用HAL提供的中断处理函数。用户自己的代码,不建议先写到中断中,而应该写到HAL提供的回调函数中。
-
6、对于每一个外设,HAL都提供了回调函数,回调函数用来实现用户自己的代码。整个调用结构由HAL库自己完成。
例如:
Uart中,HAL提供了
void HAL_UART_IRQHandler(UART_HandleTypeDef *huart);函数,用户只需要触发中断后,用户只需要调用该函数即可,同时,自己的代码写在对应的回调函数中即可!如下:
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart);void HAL_UART_TxHalfCpltCallback(UART_HandleTypeDef *huart);void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);void HAL_UART_RxHalfCpltCallback(UART_HandleTypeDef *huart);void HAL_UART_ErrorCallback(UART_HandleTypeDef *huart);
使用了哪种就用哪个回调函数即可!
基本结构
综上所述,使用HAL库编写程序(针对某个外设)的基本结构(以串口为例)如下:
-
1、 配置外设句柄 例如,建立UartConfig.c,在其中定义串口句柄 UART_HandleTypeDef huart;接着使用初始化句柄(HAL_StatusTypeDef HAL_UART_Init(UART_HandleTypeDef huart))
-
2、编写Msp 例如,建立UartMsp.c,在其中实现void HAL_UART_MspInit(UART_HandleTypeDef huart) 和 void HAL_UART_MspDeInit(UART_HandleTypeDef* huart)
-
3、实现对应的回调函数 例如,建立UartCallBack.c,在其中实现上文所说明的三大回调函数中的完成回调函数和错误回调函数 whaosoft aiot http://143ai.com
二、DC/DC电源电路推荐的PCBLyout技巧
在DC-DC芯片的应用设计中,PCB布板是否合理对于芯片能否表现出其最优性能有着至关重要的影响。不合理的PCB布板会造成芯片性能变差如线性度下降(包括输入线性度以及输出线性度)、带载能力下降、工作不稳定、EMI辐射增加、输出噪声增加等,更严重的可能会直接造成芯片损坏。
一般DC-DC芯片的使用手册中都会有其对应的PCB布板设计要求以及布板示意图,本次我们就以同步BUCK芯片为例简单讲一讲关于DC-DC芯片应用设计中的PCB Layout设计要点。
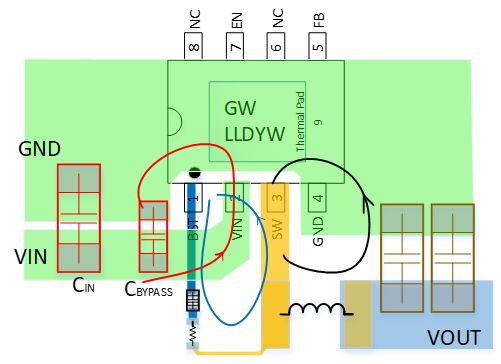
1、关注芯片工作的大电流路径
DC-DC芯片布板需遵循一个非常重要的原则,即开关大电流环路面积尽可能小。下图所示的BUCK拓补结构中可以看到芯片开关过程中存在两个大电流环路。红色为输入环路,绿色为输出环路。每一个电流环都可看作是一个环路天线,会对外辐射能量,引起EMI问题,辐射的大小与环路面积呈正比。
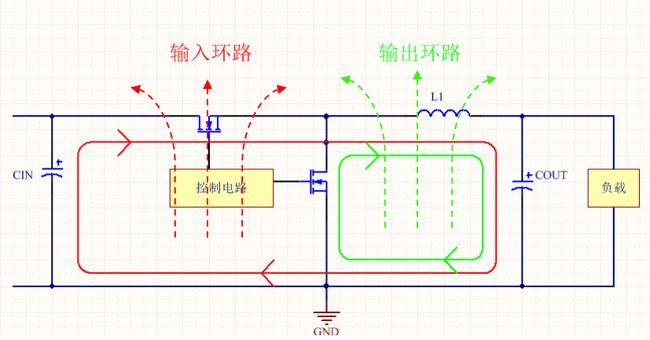
(注意:当芯片引脚设置不足以让我们同时兼顾输入环路与输出环路最小时,对于BUCK而言,应优先考虑输入部分回路布线最优化。因为输出回路中电流是连续的,而输入回路中电流是跳变的,会产生较大的di/dt,会引起EMI问题的可能性更高。如果是BOOST芯片,则应优先考虑输出回路布线最优化。)
2、输入电容的配置
-
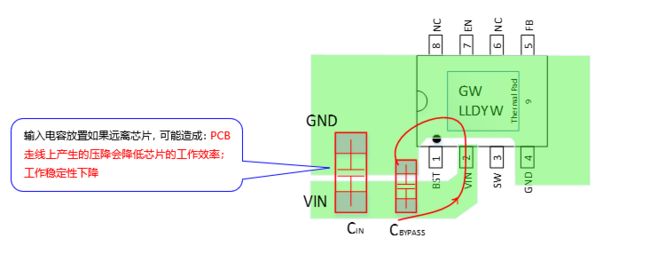
对于BUCK芯片而言,要想使输入环路尽可能小,输入电容应尽可能靠近芯片引脚放置
-
为了让电容滤波效果更好,让电源先经过输入电容,再进入芯片内部
-
CIN 使用的大容量电容器,一般情况下频率特性差,所以要与 CIN 并联频率特性好的高频率去耦电容器 CBYPASS
-
电流容量小的电源(IO≤1A)场合,容量值也变小,所以有时可用1个陶瓷电容器兼具CIN 和 CBYPASS 功能
3、电感的配置
-
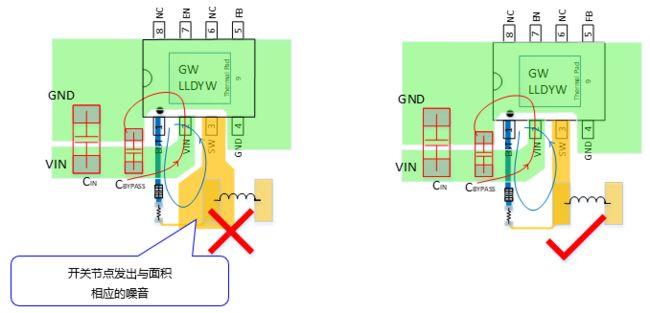
对于BUCK芯片而言,要想使输入环路尽可能小,电感要靠近芯片SW引脚放置
-
以覆铜方式走线减小寄生电感、电阻
-
SW节点要以最小面积处理大电流,防止铜箔面积变大会起到天线的作用,使 EMI 增加
-
电感附近不要走敏感信号线
-
自举电路这一块,自举电路要尽量去靠近 SW pin 脚来缩短整个高频的流通路径
附上温升10℃时,PCB板的线宽、覆铜厚度与通过电流的对应关系供参考。

4、输出电容的配置
-
降压转换器中,由于向输出串联接入电感器,所以输出电流平滑
-
输出电容靠近电感放置
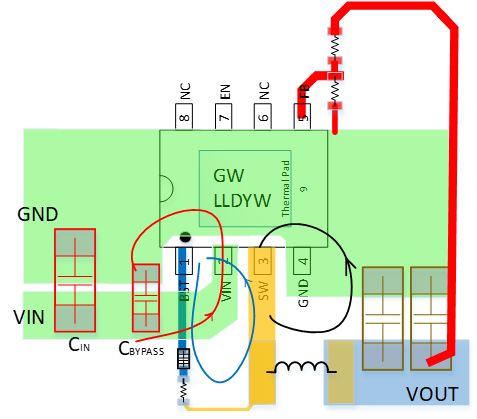
5、反馈路径的布线
-
通常FB反馈网络处的分压电阻都采用K级,10K级或上百K的阻值,阻值越大,越容易受干扰,应远离各种噪声源如电感、SW、续流二极管等
-
FB、COMP脚的信号地尽可能地与走大电流的功率地隔离开,然后进行单点相连,尽量不要让大电流信号的地 去干扰到小信号电流的地
-
FB的分压电阻要从VOUT上进行采样,采样点要靠近输出电容处才能获得更准确的实际输出电压值
三、C语言相关难点
C语言在嵌入式学习中是必备的知识,审核大部分操作都要围绕C语言进行,而其中有三块“难啃的硬骨头”几乎是公认级别的。
01
指针
指针公认最难理解的概念,也是让很多初学者选择放弃的直接原因
指针之所以难理解,因为指针本身就是一个变量,是一个非常特殊的变量,专门存放地址的变量,这个地址需要给申请空间才能装东西,而且因为是个变量可以中间赋值,这么一倒腾很多人就开始犯晕了,绕不开弯了。C语言之所以被很多高手所喜欢,就是指针的魅力,中间可以灵活的切换,执行效率超高,这点也是让小白晕菜的地方。
指针是学习绕不过去的知识点,而且学完C语言,下一步紧接着切换到数据结构和算法,指针是切换的重点,指针搞不定下一步进行起来就很难,会让很多人放弃继续学习的勇气。
指针直接对接内存结构,常见的C语言里面的指针乱指,数组越界根本原因就是内存问题。在指针这个点有无穷无尽的发挥空间。很多编程的技巧都在此集结。
指针还涉及如何申请释放内存,如果释放不及时就会出现内存泄露的情况,指针是高效好用,但不彻底搞明白对于有些人来说简直就是噩梦。
▎复杂类型说明
要了解指针,多多少少会出现一些比较复杂的类型。所以先介绍一下如何完全理解一个复杂类型。
要理解复杂类型其实很简单,一个类型里会出现很多运算符,他们也像普通的表达式一样,有优先级,其优先级和运算优先级一样。
下面让我们先从简单的类型开始慢慢分析吧。
-
int p;
这是一个普通的整型变量
-
int p;
首先从P处开始,先与结合,所以说明P是一个指针。然后再与int结合,说明指针所指向的内容的类型为int型,所以P是一个返回整型数据的指针
-
int p[3];
首先从P处开始,先与[]结合,说明P是一个数组。然后与int结合,说明数组里的元素是整型的,所以P是一个由整型数据组成的数组。
-
int *p[3];
首先从P处开始,先与[]结合,因为其优先级比高,所以P是一个数组。然后再与结合,说明数组里的元素是指针类型。之后再与int结合,说明指针所指向的内容的类型是整型的,所以P是一个由返回整型数据的指针所组成的数组。
-
int (*p)[3];
首先从P处开始,先与结合,说明P是一个指针。然后再与[]结合(与"()"这步可以忽略,只是为了改变优先级),说明指针所指向的内容是一个数组。之后再与int结合,说明数组里的元素是整型的。所以P是一个指向由整型数据组成3个整数的指针。
-
int **p;
首先从P开始,先与*结合,说明P是一个指针。然后再与*结合,说明指针所指向的元素是指针。之后再与int结合,说明该指针所指向的元素是整型数据。由于二级指针以及更高级的指针极少用在复杂的类型中,所以后面更复杂的类型我们就不考虑多级指针了,最多只考虑一级指针。
-
int p(int);
从P处起,先与()结合,说明P是一个函数。然后进入()里分析,说明该函数有一个整型变量的参数,之后再与外面的int结合,说明函数的返回值是一个整型数据。
Int (*p)(int);
从P处开始,先与指针结合,说明P是一个指针。然后与()结合,说明指针指向的是一个函数。之后再与()里的int结合,说明函数有一个int型的参数,再与最外层的int结合,说明函数的返回类型是整型,所以P是一个指向有一个整型参数且返回类型为整型的函数的指针。
-
int (p(int))[3];
可以先跳过,不看这个类型,过于复杂。从P开始,先与()结合,说明P是一个函数。然后进入()里面,与int结合,说明函数有一个整型变量参数。然后再与外面的结合,说明函数返回的是一个指针。之后到最外面一层,先与[]结合,说明返回的指针指向的是一个数组。接着再与结合,说明数组里的元素是指针,最后再与int结合,说明指针指向的内容是整型数据。所以P是一个参数为一个整数据且返回一个指向由整型指针变量组成的数组的指针变量的函数。
说到这里也就差不多了。理解了这几个类型,其它的类型对我们来说也是小菜了。不过一般不会用太复杂的类型,那样会大大减小程序的可读性,请慎用。这上面的几种类型已经足够我们用了。
▎细说指针
指针是一个特殊的变量,它里面存储的数值被解释成为内存里的一个地址。
要搞清一个指针需要搞清指针的四方面的内容:指针的类型、指针所指向的类型、指针的值或者叫指针所指向的内存区、指针本身所占据的内存区。让我们分别说明。
先声明几个指针放着做例子:
(1)int*ptr;
(2)char*ptr;
(3)int**ptr;
(4)int(*ptr)[3];
(5)int*(*ptr)[4];
▎指针的类型
从语法的角度看,小伙伴们只要把指针声明语句里的指针名字去掉,剩下的部分就是这个指针的类型。这是指针本身所具有的类型。
让我们看看上述例子中各个指针的类型:
(1)intptr;//指针的类型是int
(2)charptr;//指针的类型是char
(3)intptr;//指针的类型是int
(4)int(ptr)[3];//指针的类型是int()[3]
(5)int*(ptr)[4];//指针的类型是int(*)[4]
怎么样?找出指针的类型的方法是不是很简单?
▎指针所指向的类型
当通过指针来访问指针所指向的内存区时,指针所指向的类型决定了编译器将把那片内存区里的内容当做什么来看待。
从语法上看,小伙伴们只需把指针声明语句中的指针名字和名字左边的指针声明符*去掉,剩下的就是指针所指向的类型。
上述例子中各个指针所指向的类型:
(1)intptr; //指针所指向的类型是int
(2)char*ptr; //指针所指向的的类型是char*
(3)int*ptr; //指针所指向的的类型是int*
(4)int(*ptr)[3]; //指针所指向的的类型是int(*)[3]
(5)int*(*ptr)[4]; //指针所指向的的类型是int*(*)[4]
在指针的算术运算中,指针所指向的类型有很大的作用。
指针的类型(即指针本身的类型)和指针所指向的类型是两个概念。当小伙伴们对C 越来越熟悉时,就会发现,把与指针搅和在一起的"类型"这个概念分成"指针的类型"和"指针所指向的类型"两个概念,是精通指针的关键点之一。
▎指针的值
即指针所指向的内存区或地址。
指针的值是指针本身存储的数值,这个值将被编译器当作一个地址,而不是一个一般的数值。
在32位程序里,所有类型的指针的值都是一个32位整数,因为32位程序里内存地址全都是32位长。指针所指向的内存区就是从指针的值所代表的那个内存地址开始,长度为si zeof(指针所指向的类型)的一片内存区。
以后,我们说一个指针的值是XX,就相当于说该指针指向了以XX为首地址的一片内存区域;我们说一个指针指向了某块内存区域,就相当于说该指针的值是这块内存区域的首地址。
指针所指向的内存区和指针所指向的类型是两个完全不同的概念。在例一中,指针所指向的类型已经有了,但由于指针还未初始化,所以它所指向的内存区是不存在的,或者说是无意义的。
以后,每遇到一个指针,都应该问问:这个指针的类型是什么?指针指的类型是什么?该指针指向了哪里?
▎指针本身所占据的内存区
指针本身占了多大的内存?只要用函数sizeof(指针的类型)测一下就知道了。在32位平台里,指针本身占据4个字节的长度。指针本身占据的内存这个概念在判断一个指针表达式是否是左值时很有用。
02
函数概念
面向过程对象模块的基本单位,以及对应各种组合,函数指针,指针函数
一个函数就是一个业务逻辑块,是面向过程,单元模块的最小单元,而且在函数的执行过程中,形参,实参如何交换数据,如何将数据传递出去,如何设计一个合理的函数,不单单是解决一个功能,还要看是不是能够复用,避免重复造轮子。
函数指针和指针函数,表面是两个字面意思的互换实际上含义截然不同,指针函数比较好理解,就是返回指针的一个函数,函数指针这个主要用在回调函数,很多人觉得函数都没还搞明白,回调函数更晕菜了。其实可以通俗的理解指向函数的指针,本身是一个指针变量,只不过在初始化的时候指向了函数,这又回到了指针层面。没搞明白指针再次深入的向前走特别难。

C语言的开发者们为后来的开发者做了一些省力气的事情,他们编写了大量代码,将常见的基本功能都完成了,可以让别人直接拿来使用。但是那么多代码,如何从中找到自己需要的呢?将所有代码都拿来显然是不太现实。
但是这些代码,早已被早期的开发者们分门别类地放在了不同的文件中,并且每一段代码都有唯一的名字。所以其实学习C语言并没有那么难,尤其是可以在动手锻炼做项目中进行。使用代码时,只要在对应的名字后面加上( )就可以。这样的一段代码就是函数,函数能够独立地完成某个功能,一次编写完成后可以多次使用。
很多初学者可能都会把C语言中的函数和数学中的函数概念搞混淆。其实真相并没有那么复杂,C语言中的函数是有规律可循迹的,只要搞清楚了概念你会发现还挺有意思的。
函数的英文名称是 Function,对应翻译过来的中文还有“功能”的意思。C语言中的函数也跟功能有着密切的关系。
我们来看一小段C语言代码:
#includeint main(){puts("Hello World");return 0;}
把目光放在第4行代码上,这行代码会在显示器上输出“Hello World”。前面我们已经讲过,puts 后面要带( ),字符串也要放在( )中。
在C语言中,有的语句使用时不能带括号,有的语句必须带括号。带括号的就是函数(Function)。
C语言提供了很多功能,我们只需要一句简单的代码就能够使用。但是这些功能的底层都比较复杂,通常是软件和硬件的结合,还要要考虑很多细节和边界,如果将这些功能都交给程序员去完成,那将极大增加程序员的学习成本,降低编程效率。
有了函数之后,C语言的编程效率就好像有了神器一样,开发者们只需要随时调用就可以了,像进程函数、操作函数、时间日期函数等都可以帮助我们直接实现C语言本身的功能。
C语言函数是可以重复使用的。
函数的一个明显特征就是使用时必须带括号( ),必要的话,括号中还可以包含待处理的数据。例如puts("尚观科技")就使用了一段具有输出功能的代码,这段代码的名字是 puts,"尚观科技" 是要交给这段代码处理的数据。使用函数在编程中有专业的称呼,叫做函数调用(Function Call)。
如果函数需要处理多个数据,那么它们之间使用逗号,分隔,例如:
pow(10, 2);
该函数用来求10的2次方。
03
结构体,递归
很多在大学学习C语言的,很多课程都没学完,结构体都没学到,因为从章节的安排来看好像,结构体学习放在教材的后半部分了,弄得很多学生觉得结构体不重要,如果只是应付学校的考试,或者就是为了混个毕业证,的确学的意义不大。
如果想从事编程这个行业,对这个概念还不了解,基本上无法构造数据模型,没有一个业务体是完全使用原生数据类型来完成的,很多高手在设计数据模型的时候,一般先把头文件中的结构体数据整理出来。然后设计好功能函数的参数,以及名字,然后才真正开始写c源码。
如果从节省空间考虑结构体里面的数据放的顺序不一样在内存中占用的空间也不一样,结构体与结构体之间赋值,结构体存在指针那么赋值要特别注意,需要进行深度的赋值。
递归一般用于从头到位统计或者罗列一些数据,在使用的时候很多初学者都觉得别扭,怎么还能自己调用自己?而且在使用的时候,一定设置好跳出的条件,不然无休止的进行下去,真就成无线死循环了。
相信大家对于结构体都不陌生。在此,分享出本人对C语言结构体的研究和学习的总结。如果你发现这个总结中有你以前所未掌握的,那本文也算是有点价值了。当然,水平有限,若发现不足之处恳请指出。代码文件test.c我放在下面。
在此,我会围绕以下2个问题来分析和应用C语言结构体:
1. C语言中的结构体有何作用
2. 结构体成员变量内存对齐有何讲究(重点)
对于一些概念的说明,我就不把C语言教材上的定义搬上来。我们坐下来慢慢聊吧。
1. 结构体有何作用
三个月前,教研室里一个学长在华为南京研究院的面试中就遇到这个问题。当然,这只是面试中最基础的问题。如果问你你怎么回答?
我的理解是这样的,C语言中结构体至少有以下三个作用:
(1) 有机地组织了对象的属性。
比如,在STM32的RTC开发中,我们需要数据来表示日期和时间,这些数据通常是年、月、日、时、分、秒。如果我们不用结构体,那么就需要定义6个变量来表示。这样的话程序的数据结构是松散的,我们的数据结构最好是“高内聚,低耦合”的。所以,用一个结构体来表示更好,无论是从程序的可读性还是可移植性还是可维护性皆是:
typedef struct //公历日期和时间结构体{vu16 year;vu8 month;vu8 date;vu8 hour;vu8 min;vu8 sec;}_calendar_obj;_calendar_obj calendar; //定义结构体变量
(2) 以修改结构体成员变量的方法代替了函数(入口参数)的重新定义。
如果说结构体有机地组织了对象的属性表示结构体“中看”,那么以修改结构体成员变量的方法代替函数(入口参数)的重新定义就表示了结构体“中用”。继续以上面的结构体为例子,我们来分析。假如现在我有如下函数来显示日期和时间:
void DsipDateTime( _calendar_obj DateTimeVal)
那么我们只要将一个_calendar_obj这个结构体类型的变量作为实参调用DsipDateTime()即可,DsipDateTime()通过DateTimeVal的成变量来实现内容的显示。如果不用结构体,我们很可能需要写这样的一个函数:
void DsipDateTime( vu16 year,vu8 month,vu8 date,vu8 hour,vu8 min,vu8 sec)显然这样的形参很不可观,数据结构管理起来也很繁琐。如果某个函数的返回值得是一个表示日期和时间的数据,那就更复杂了。这只是一方面。
另一方面,如果用户需要表示日期和时间的数据中还要包含星期(周),这个时候,如果之前没有用机构体,那么应该在DsipDateTime()函数中在增加一个形参vu8 week:
void DsipDateTime( vu16 year,vu8 month,vu8 date,vu8 week,vu8 hour,vu8 min,vu8 sec)
可见这种方法来传递参数非常繁琐。所以以结构体作为函数的入口参数的好处之一就是函数的声明void DsipDateTime( _calendar_obj DateTimeVal)不需要改变,只需要增加结构体的成员变量,然后在函数的内部实现上对calendar.week作相应的处理即可。这样,在程序的修改、维护方面作用显著。
typedef struct //公历日期和时间结构体{vu16 year;vu8 month;vu8 date;vu8 week;vu8 hour;vu8 min;vu8 sec;}_calendar_obj;_calendar_obj calendar; //定义结构体变量
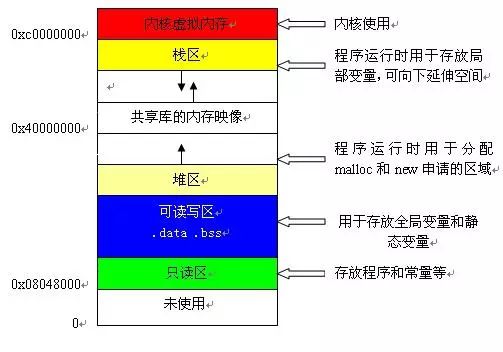
(3) 结构体的内存对齐原则可以提高CPU对内存的访问速度(以空间换取时间)。
并且,结构体成员变量的地址可以根据基地址(以偏移量offset)计算。我们先来看看下面的一段简单的程序,对于此程序的分析会在第2部分结构体成员变量内存对齐中详细说明。
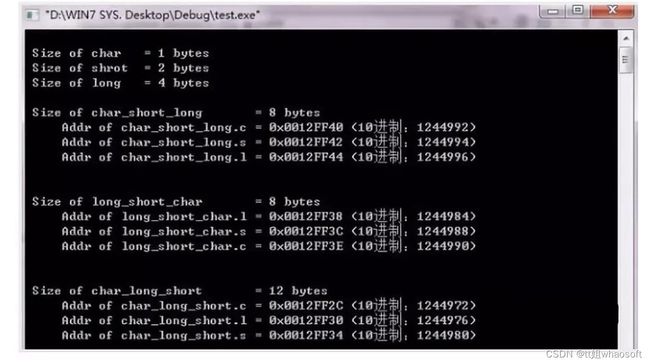
#includeint main(){struct //声明结构体char_short_long{char c;short s;long l;}char_short_long;struct //声明结构体long_short_char{long l;short s;char c;}long_short_char;struct //声明结构体char_long_short{char c;long l;short s;}char_long_short;printf(" \n");printf(" Size of char = %d bytes\n",sizeof(char));printf(" Size of shrot = %d bytes\n",sizeof(short));printf(" Size of long = %d bytes\n",sizeof(long));printf(" \n"); //char_short_longprintf(" Size of char_short_long = %d bytes\n",sizeof(char_short_long));printf(" Addr of char_short_long.c = 0x%p (10进制:%d)\n",&char_short_long.c,&char_short_long.c);printf(" Addr of char_short_long.s = 0x%p (10进制:%d)\n",&char_short_long.s,&char_short_long.s);printf(" Addr of char_short_long.l = 0x%p (10进制:%d)\n",&char_short_long.l,&char_short_long.l);printf(" \n");printf(" \n"); //long_short_charprintf(" Size of long_short_char = %d bytes\n",sizeof(long_short_char));printf(" Addr of long_short_char.l = 0x%p (10进制:%d)\n",&long_short_char.l,&long_short_char.l);printf(" Addr of long_short_char.s = 0x%p (10进制:%d)\n",&long_short_char.s,&long_short_char.s);printf(" Addr of long_short_char.c = 0x%p (10进制:%d)\n",&long_short_char.c,&long_short_char.c);printf(" \n");printf(" \n"); //char_long_shortprintf(" Size of char_long_short = %d bytes\n",sizeof(char_long_short));printf(" Addr of char_long_short.c = 0x%p (10进制:%d)\n",&char_long_short.c,&char_long_short.c);printf(" Addr of char_long_short.l = 0x%p (10进制:%d)\n",&char_long_short.l,&char_long_short.l);printf(" Addr of char_long_short.s = 0x%p (10进制:%d)\n",&char_long_short.s,&char_long_short.s);printf(" \n");return 0;}
程序的运行结果如下(注意:括号内的数据是成员变量的地址的十进制形式):
2. 结构体成员变量内存对齐
首先,我们来分析一下上面程序的运行结果。前三行说明在我的程序中,char型占1个字节,short型占2个字节,long型占4个字节。char_short_long、long_short_char和char_long_short是三个结构体成员相同但是成员变量的排列顺序不同。并且从程序的运行结果来看,
Size of char_short_long = 8 bytesSize of long_short_char = 8 bytesSize of char_long_short = 12 bytes //比前两种情况大4 byte !并且,还要注意到,1 byte (char)+ 2 byte (short)+ 4 byte (long) = 7 byte,而不是8 byte。
所以,结构体成员变量的放置顺序影响着结构体所占的内存空间的大小。一个结构体变量所占内存的大小不一定等于其成员变量所占空间之和。如果一个用户程序或者操作系统(比如uC/OS-II)中存在大量结构体变量时,这种内存占用必须要进行优化,也就是说,结构体内部成员变量的排列次序是有讲究的。
结构体成员变量到底是如何存放的呢?
在这里,我就不卖关子了,直接给出如下结论,在没有#pragma pack宏的情况下:
原则1 结构(struct或联合union)的数据成员,第一个数据成员放在offset为0的地方,以后每个数据成员存储的起始位置要从该成员大小的整数倍开始(比如int在32位机为4字节,则要从4的整数倍地址开始存储)。
原则2 结构体的总大小,也就是sizeof的结果,必须是其内部最大成员的整数倍,不足的要补齐。
*原则3 结构体作为成员时,结构体成员要从其内部最大元素大小的整数倍地址开始存储。(struct a里存有struct b,b里有char,int,double等元素时,那么b应该从8的整数倍地址处开始存储,因为sizeof(double) = 8 bytes)
这里,我们结合上面的程序来分析(暂时不讨论原则3)。
先看看char_short_long和long_short_char这两个结构体,从它们的成员变量的地址可以看出来,这两个结构体符合原则1和原则2。注意,在 char_short_long的成员变量的地址中,char_short_long.s的地址是1244994,也就是说,1244993是“空的”,只是被“占位”了!
再看看char_long_short这个结构体,char_long_short的地址分布情况如下表:
| 成员变量 |
成员变量十六进制地址 |
成员变量十进制地址 |
| char_long_short.c |
0x0012FF2C |
1244972 |
| char_long_short.l |
0x0012FF30 |
1244976 |
| char_long_short.s |
0x0012FF34 |
1244980 |
可见,其内存分布图如下,共12 bytes:
| 地址 |
1244972 |
1244973 |
1244974 |
1244975 |
1244976 |
1244977 |
1244978 |
1244979 |
1244980 |
1244981 |
1244982 |
1244983 |
| 成员 |
.c |
.l |
.s |
|||||||||
首先,1244972能被1整除,所以char_long_short.c放在1244972处没有问题(其实,就char型成员变量自身来说,其放在任何地址单元处都没有问题),根据原则1,在之后的1244973~1244975中都没有能被4(因为sizeof(long)=4bytes)整除的,1244976能被4整除,所以char_long_short.l应该放在1244976处,那么同理,最后一个.s(sizeof(short)=2 bytes)是应该放在1244980处。
是不是这样就结束了?不是,还有原则2。根据原则2的要求,char_long_short这个结构体所占的空间大小应该是其占内存空间最大的成员变量的大小的整数倍。如果我们到此就结束了,那么char_long_short所占的内存空间是1244972~1244981共计10bytes,不符合原则2,所以,必须在最后补齐2个 bytes(1244982~1244983)。
至此,一个结构体的内存布局完成了。
下面我们按照上述原则,来验证这样的分析是不是正确。按上面的分析,地址单元1244973、1244974、1244975以及1244982、1244983都是空的(至少char_long_short未用到,只是“占位”了)。如果我们的分析是正确的,那么,定义这样一个结构体,其所占内存也应该是12 bytes:
struct //声明结构体char_long_short_new{char c;char add1; //补齐空间char add2; //补齐空间char add3; //补齐空间long l;short s;char add4; //补齐空间char add5; //补齐空间}char_long_short_new;
运行结果如下:

可见,我们的分析是正确的。至于原则3,大家可以自己编程验证,这里就不再讨论了。
所以,无论你是在VC6.0还是Keil C51,还是Keil MDK中,当你需要定义一个结构体时,只要你稍微留心结构体成员变量内存对齐这一现象,就可以在很大程度上节约MCU的RAM。这一点不仅仅应用于实际编程,在很多大型公司,比如IBM、微软、百度、华为的笔试和面试中,也是常见的。
四、ESP8266自动下载电路设计
我们最爱的esp又来了
使用过51单片机的朋友会清楚:51单片机在烧写程序的时候需要断一下电再上电;使用过STM32单片机的朋友会清楚:烧写程序时需要设置Boot模式。ESP8266在烧写程序时也需要手动设置模式,STM32的ISP自动下载电路都有了,那么ESP8266有没有自动下载电路呢?答案是有的。下面来分析。
自动下载电路设计
ESP8266下载过程中发现每次都需要去设置GPIO0的状态,如何实现自动给实现GPIO0电平状态的切换呢?看下面的电路。
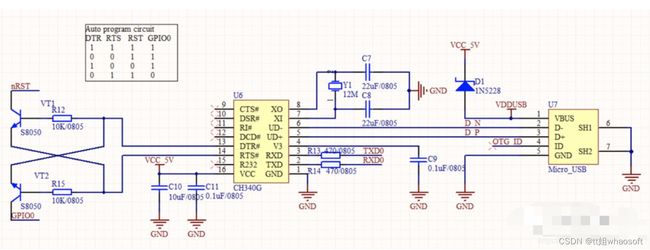
可以看到这个下载电路相对于普通的CH340G下载电路,这个电路是把CH340G芯片中的DTR和RTS引脚引出到两个S8050的三极管上,去控制nRST和GPIO0的电平。
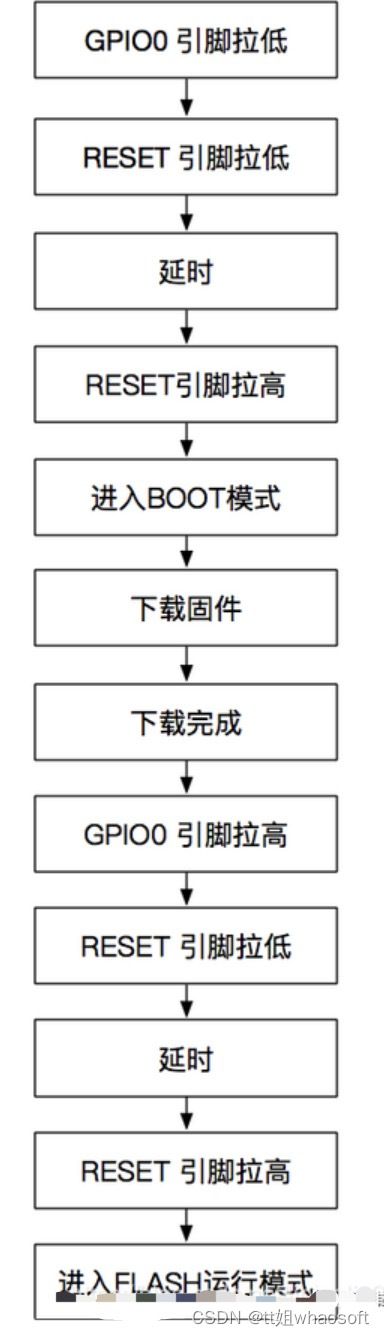
ESP8266下载模式
根据ESP8266芯片资料要求的下载流程,必须在GPIO0为低电平的状态下,复位芯片,才会进入USART下载模式。
我们看看该自动下载电路是怎么实现这个流程时序的,首先我们还是得从核心器件CH340G分析入手。
核心器件CH340系列

CH340G 是一个USB转串口的集成芯片,关键性能参数如下:

可以看到数据手册中的引脚描述:DTR#引脚是MODEM联络输出信号,数据终端就绪,低(高)有效,在USB配置完成之前作为配置输入引脚,可以外接4.7KΩ的下拉电阻在USB枚举期间产生默认的低电平。RTS#引脚MODEM联络输出信号,请求发送,低(高)有效。这两个MODEM联络信号是由计算机应用程序控制并定义其用途的,在软件下发点击下载按钮后,通常会给DTR#拉低、RTS拉高,然后延时一段时间后,拉高DTR#,RTS#恢复到低电平。

注意:新设计的电路板可以选用CH340C,内置晶振,无需外接晶振。
从原理图中可以看到这个两个引脚连接的逻辑电路如下:
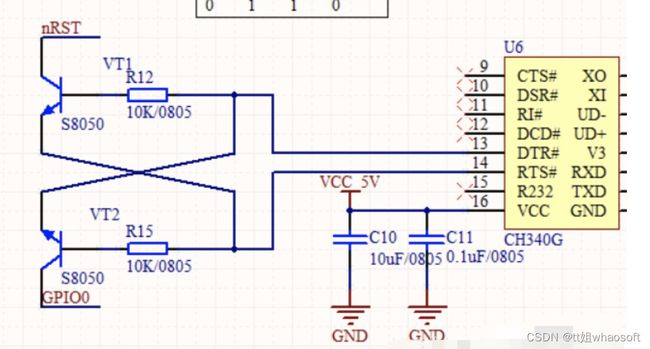
端口真值表
根据该电路,可以知道当 DTR为1, RTS为0时, nRST复位引脚拉低,反之,GPIO0 引脚拉低,得到的逻辑关系图如下:
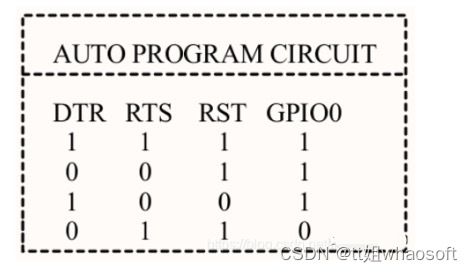
这样的化,在点击下载按钮后,CH340G芯片的DTR处于低电平,RTS处于高电平,此时ESP8266的GPIO0被拉低,复位RST信号为高,ESP8266进入下载模式,CH340G的DTR和RTS电平翻转后,RST为0,GPIO0变1,ESP8266进入Flash运行模式,程序正常运行。这样就实现了ESP8266自动下载。