图神经网络/GNN(四)-节点预测与边预测任务实践
Task4概览
本次任务主要包括两大块,分别是数据完全存于内存的数据集类、节点/边任务预测的实践。其中前者可将占用内存有限的数据集全部存于内存中,方便实际的运算;同时,在定义好的数据集类的基础上,后者进行了节点预测以及边预测的任务实践。
一、数据完全存于内存的数据集类
对于占用内存有限的数据集,我们可以将整个数据集的数据都存储到内存里,这样在计算的过程中运算速度会更加快。
幸运的是,PyG为我们提供了方便的构造数据完全存储于内存的数据集类,简称为Inmemory数据集类,在此小节将学习构造Inmemory数据集类的方式。
此外,如果数据集比较大,不适合一次性存储于内存,一般不会直接加载到内存中,此种情况下在构建数据集的时候需要继承父类Dataset,本节不会涉及这一部分。
1.1 InMemoryDataset基类简介
我们可以通过继承PyG中的InMemoryDataset类来自定义一个数据可全部存储到内存的数据集类。
InMemoryDataset类初始化方法说明:
-
root:字符串类型,存储数据集的文件夹的路径。该文件夹下有两个文件夹: -
一个文件夹为记录在raw_dir,它用于存储未处理的文件,从网络上下载的数据集原始文件 会被存放到这里;
-
另一个文件夹记录在processed_dir ,处理后的数据被保存到这里,以后从此文件夹下加载文件即可获得Data对象。
-
注:raw_dir和processed_dir是属性方法,我们可以自定义要使用的文件夹。
-
transform:函数类型,一个数据转换函数,它接收一个Data对象并返回一个转换后的Data对象。此函数在每一次数据获取过程中都会被执行。获取数据的函数首先使用此函数对Data对象做转换,然后才返回数据。此函数应该用于数据增广(Data Augmentation)。该参数默认值为None,表示不对数据做转换。 -
pre_transform:函数类型,一个数据转换函数,它接收一个Data对象并返回一个转换后的Data对象。此函数在Data对象被保存到文件前调用。因此它应该用于只执行一次的数据预处理。该参数默认值为None,表示不做数据预处理。 -
pre_filter:函数类型,一个检查数据是否要保留的函数,它接收一个Data对象,返回此Data对象是否应该被包含在最终的数据集中。此函数也在Data对象被保存到文件前调用。该参数默认值为None,表示不做数据检查,保留所有的数据。
| 参数 | 作用 |
|---|---|
| root | 存储数据的路径,raw_dir和processed_dir |
| transform | 数据转换函数——用于数据增广(每次都会执行) |
| pre_transform | 数据转换函数——用于数据预处理(保存到文件前调用,仅执行一次) |
| pre_filter | 数据过滤(保存到文件前调用) |
通过继承InMemoryDataset类来构造一个我们自己的数据集类,我们需要实现四个基本方法 :
| 方法 | 作用 |
|---|---|
| raw_file_names() | 返回一个数据集原始文件的文件名列表,应该能在raw_dir文件夹中找到,否则调用download()函数下载文件到raw_dir文件夹 |
| processed_file_names() | 返回一个存储处理过的数据的文件的文件名列表,存储处理过的数据的文件应该能在processed_dir文件夹中找到,否则调用process()函数对样本做处理,然后保存处理过的数据到processed_dir文件夹下的文件 |
| download() | 下载数据集原始文件到raw_dir文件夹 |
| process() | 处理数据,保存处理好的数据到processed_dir文件夹下的文件 |
1.2 InMemoryDataset数据集类实例
本小节以公开数据集PubMed为例子,进行InMemoryDataset数据集实例分析。
PubMed 数据集存储的是文章引用网络,文章对应图的结点,如果两篇文章存在引用关系(无论引用与被引),则这两篇文章对应的结点之间存在边。
PyG中的Planetoid数据集类包含了数据集PubMed的使用,因此我们直接基于Planetoid类进行修改,得到PlanetoidPubMed数据集类。
1.2.1 PlanetoidPubMed数据集类的构造
PlanetoidPubMed数据集类如下所示:
import os.path as osp
import torch
from torch_geometric.data import (InMemoryDataset, download_url)
from torch_geometric.io import read_planetoid_data
class PlanetoidPubMed(InMemoryDataset):
r""" 节点代表文章,边代表引文关系。
训练、验证和测试的划分通过二进制掩码给出。
参数:
root (string): 存储数据集的文件夹的路径
transform (callable, optional): 数据转换函数,每一次获取数据时被调用。
pre_transform (callable, optional): 数据转换函数,数据保存到文件前被调用。
"""
url = 'https://github.com/kimiyoung/planetoid/raw/master/data'
def __init__(self, root, transform=None, pre_transform=None):
super(PlanetoidPubMed, self).__init__(root, transform, pre_transform)
self.data, self.slices = torch.load(self.processed_paths[0])
@property
def raw_dir(self):
return osp.join(self.root, 'raw')
@property
def processed_dir(self):
return osp.join(self.root, 'processed')
@property
def raw_file_names(self):
names = ['x', 'tx', 'allx', 'y', 'ty', 'ally', 'graph', 'test.index']
return ['ind.pubmed.{}'.format(name) for name in names]
@property
def processed_file_names(self):
return 'data.pt'
def download(self):
for name in self.raw_file_names:
download_url('{}/{}'.format(self.url, name), self.raw_dir)
def process(self):
data = read_planetoid_data(self.raw_dir, 'pubmed')
data = data if self.pre_transform is None else self.pre_transform(data)
torch.save(self.collate([data]), self.processed_paths[0])
def __repr__(self):
return '{}()'.format(self.name)
除了1.1节中提及的方法外,代码中还实现了raw_dir()和processed_dir()两个属性方法,通过修改返回值我们就可以修改要使用的文件夹。
1.2.2 新建数据集类的使用
在我们生成一个PlanetoidPubMed类的对象时,程序运行流程 如下:
- 首先,检查数据原始文件是否已下载 :
- 检查self.raw_dir目录下是否存在raw_file_names()属性方法返回的每个文件,
- 如有文件不存在,则调用download()方法执行原始文件下载。
- self.raw_dir为osp.join(self.root, 'raw')。
- 其次,检查数据是否经过处理 :
- 首先,检查之前对数据做变换的方法 :检查self.processed_dir目录下是否存在pre_transform.pt文件:
- 如果存在,意味着之前进行过数据变换,接着需要加载该文件,以获取之前所用的数据变换的方法,并检查它与当前pre_transform参数指定的方法是否相同,
- 如果不相同则会报出一个警告,“The pre_transform argument differs from the one used in ……”。
- self.processed_dir为osp.join(self.root, 'processed')。
- 其次,检查之前的样本过滤的方法 :检查self.processed_dir目录下是否存在pre_filter.pt文件:
- 如果存在,则加载该文件并获取之前所用的样本过滤的方法,并检查它与当前pre_filter参数指定的方法是否相同,
- 如果不相同则会报出一个警告,“The pre_filter argument differs from the one used in ……”。
- 接着,检查是否存在处理好的数据 :检查self.processed_dir目录下是否存在self.processed_file_names属性方法返回的所有文件,如有文件不存在,则需要执行以下的操作:
- 调用process()方法,进行数据处理。
- 如果pre_transform参数不为None,则调用pre_transform()函数进行数据处理。
- 如果pre_filter参数不为None,则进行样本过滤(此例子中不需要进行样本过滤,pre_filter参数为None)。
- 保存处理好的数据到文件,文件存储在**processed_paths()**属性方法返回的文件路径。如果将数据保存到多个文件中,则返回的路径有多个。
- processed_paths() 属性方法是在基类中定义的 ,它对self.processed_dir文件夹与processed_file_names()属性方法的返回每一个文件名做拼接,然后返回。
- 最后保存新的pre_transform.pt文件和pre_filter.pt文件,它们分别存储当前使用的数据处理方法和样本过滤方法。
最后让我们来查看这个数据集 :
dataset = PlanetoidPubMed('Dataset【Nutstore】/PlanetoidPubMed')
print(dataset.num_classes)
print(dataset[0].num_nodes)
print(dataset[0].num_edges)
print(dataset[0].num_features)
# 3
# 19717
# 88648
# 500
可以看到这个数据集包含三个分类任务,共19,717个结点,88,648条边,节点特征维度为500。
二、节点预测任务实践(自定义Pipline流程)
本节将通过第一节内容构建的数据完整存储于内存的数据集类(PlanetoidPubMed数据集类),同时建立一个多层的图神经网络,来实现节点预测任务。
2.1 构建多层GNN网络
在之前的任务中,我们了解了几种常用的图卷积层模型,包括GCN、GAT、SAGE等等。
本小节使用GAT图卷积层来构建多层GNN网络。
由于神经网络是由多个GATConv顺序相连而构成,为了方便定义GAT神经网络,使其能够通过参数来定义GATConv的层数,以及每一层GATConv的out_channels。我们使用torch_geometric.nn.Sequential容器,具体操作可以官方文档。
构建的GAT图神经网络代码如下:
class GAT(torch.nn.Module):
def __init__(self, num_features, hidden_channels_list, num_classes):
super(GAT, self).__init__()
torch.manual_seed(12345)
hns = [num_features] + hidden_channels_list
conv_list = []
for idx in range(len(hidden_channels_list)):
conv_list.append((GATConv(hns[idx], hns[idx+1]), 'x, edge_index -> x'))
conv_list.append(ReLU(inplace=True),)
self.convseq = Sequential('x, edge_index', conv_list)
self.linear = Linear(hidden_channels_list[-1], num_classes)
def forward(self, x, edge_index):
x = self.convseq(x, edge_index)
x = F.dropout(x, p=0.5, training=self.training)
x = self.linear(x)
return x
此网络由多个GATConv层组成,通过hidden_channels_list参数来设置每一层GATConv的out_channel,同时hidden_channels_list的长度即为GATConv的层数。
2.2 定义训练、测试函数
# 定义训练、测试函数
def train():
model.train()
optimizer.zero_grad() # Clear gradients.
out = model(data.x, data.edge_index) # Perform a single forward pass.
# Compute the loss solely based on the training nodes.
loss = criterion(out[data.train_mask], data.y[data.train_mask])
loss.backward() # Derive gradients.
pred = out.argmax(dim=1)
correct = float(pred[data.train_mask].eq(data.y[data.train_mask]).sum().item())
acc = correct / data.train_mask.sum().item()
optimizer.step() # Update parameters based on gradients.
return loss.cpu().detach().data.item(), acc
def test():
model.eval()
out = model(data.x, data.edge_index)
pred = out.argmax(dim=1) # Use the class with highest probability.
test_correct = pred[data.test_mask] == data.y[data.test_mask] # Check against ground-truth labels.
test_acc = int(test_correct.sum()) / int(data.test_mask.sum()) # Derive ratio of correct predictions.
return test_acc
2.3 定义生成结果函数
# 定义生成结果的函数
def result(train, test, epoch=101, per=5):
train_loss = []
train_acc = [];test_acc=[]
for i in range(1, epoch):
loss, acc = train()
train_loss.append(loss)
train_acc.append(acc)
if i % per == 0:
print('[Epoch {}/{}] Loss {:.4f}, train acc {:.4f}'.format(i, epoch-1, loss, acc))
acc = test()
test_acc.append(acc)
print('Accuracy: {:.4f}'.format(acc))
return (train_loss, train_acc, test_acc)
2.4 主程序运行
# 输入模型相关参数
hidden_channels_list = [200, 100]
model = GAT(num_features=dataset.num_features, hidden_channels_list=hidden_channels_list, num_classes=dataset.num_classes).to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=0.01, weight_decay=5e-4)
criterion = torch.nn.CrossEntropyLoss()
# 导入数据,并使用GPU加速
dataset = PlanetoidPubMed(root='...', transform=NormalizeFeatures())
print('dataset.num_features:', dataset.num_features)
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
data = dataset[0].to(device)
# 生成迭代运行结果
(train_loss, train_acc, test_acc) = result(train, test, epoch=15, per=3)
# 画出结果图像
plt.figure(figsize=(18,4))
plt.subplot(1,3,1);plt.plot(train_loss);plt.title('loss')
plt.subplot(1,3,2);plt.plot(train_acc);plt.title('train acc')
plt.subplot(1,3,3);plt.plot(test_acc);plt.title('test acc')
plt.show()
2.5 【作业】节点分类任务实验对比
2.5.1 不同卷积层实验结果对比
我们使用了GAT、GCN、FeaSt三种卷积层进行对比实验,隐藏层为双层[100, 50],其在训练集与测试集的结果如下所示:
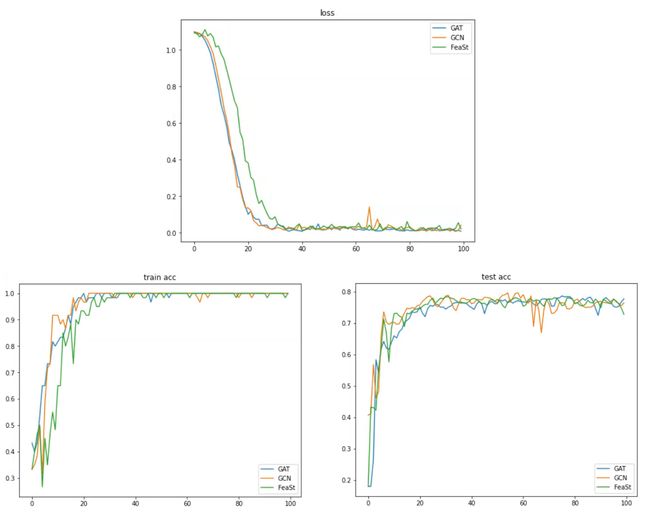
从训练过程的Loss可以看出,GAT与GCN有着相似的下降情况,FeaSt收敛得比较慢。
从测试集的效果可以看出,三种卷积层的性能相似。
2.5.2 不同层数对比
为了探究不同隐藏层数量对于节点分类任务的影响,本小节在三种不同卷积层(GAT、GCN、FeaSt)上进行了不同卷积层数目(2-5层)的实验,实验结果如下:
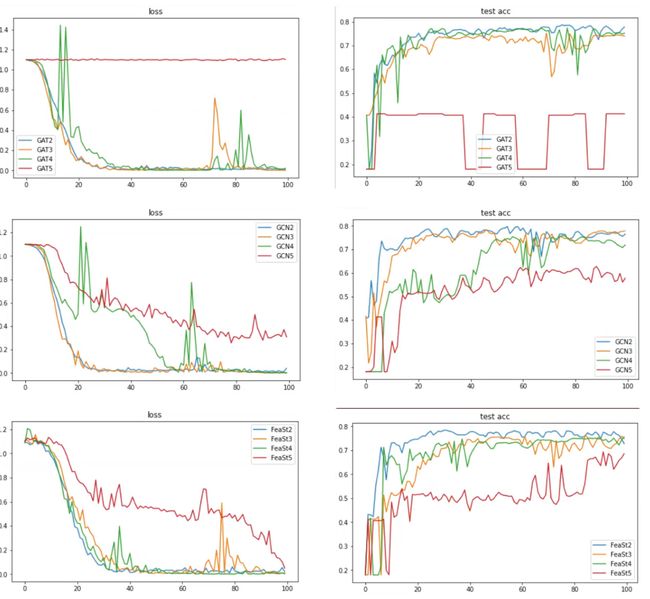
从总体变化趋势上可以看出,卷积层数目越多,节点分类效果反而越差,两层隐藏层是效果最好。
其中,当隐藏层为5时,在GAT卷积网络上发生了异常数值的情况,具体原因尚在分析中。
因此,在实际使用隐藏层时,不用为了实验效果而刻意追求多加隐藏层的数量。
三、边预测任务实践
边预测任务是另一类常见的图神经网络任务,目标是预测两个节点之间是否存在边。
一般的数据集中edge_index中存储的是有连接关系的节点对,可以称之为正样本。为了构建边预测任务,需要生成一些负样本,即采样一些不存在边的节点对作为负样本边,保持正负样本的平衡。
此外要将样本分为训练集、验证集和测试集三个集合。
3.1 获取数据集并分析
import os.path as osp
from torch_geometric.utils import negative_sampling
from torch_geometric.datasets import Planetoid
import torch_geometric.transforms as T
from torch_geometric.utils import train_test_split_edges
from sklearn.metrics import roc_auc_score
dataset = Planetoid(root = 'E:\Dataset', name = 'Cora', transform=T.NormalizeFeatures())
data = dataset[0]
data.train_mask = data.val_mask = data.test_mask = data.y = None # 不再有用
print(data.edge_index.shape)
# torch.Size([2, 10556])
data = train_test_split_edges(data)
for key in data.keys:
print(key, getattr(data, key).shape)
# x torch.Size([2708, 1433])
# val_pos_edge_index torch.Size([2, 263])
# test_pos_edge_index torch.Size([2, 527])
# train_pos_edge_index torch.Size([2, 8976])
# train_neg_adj_mask torch.Size([2708, 2708])
# val_neg_edge_index torch.Size([2, 263])
# test_neg_edge_index torch.Size([2, 527])
我们观察到训练集、验证集和测试集中正样本边的数量之和不等于原始边的数量。这是因为,现在所用的Cora图是无向图,在统计原始边数量时,每一条边的正向与反向各统计了一次,训练集也包含边的正向与反向,但验证集与测试集都只包含了边的一个方向。
为什么训练集要包含边的正向与反向,而验证集与测试集都只包含了边的一个方向?
这是因为,训练集用于训练,训练时一条边的两个端点要互传信息,只考虑一个方向的话,只能由一个端点传信息给另一个端点,而验证集与测试集的边用于衡量检验边预测的准确性,只需考虑一个方向的边即可。
3.2 构建边预测图神经网络
import torch
from torch_geometric.nn import GCNConv
class Net(torch.nn.Module):
def __init__(self, in_channels, out_channels):
super(Net, self).__init__()
self.conv1 = GCNConv(in_channels, 128)
self.conv2 = GCNConv(128, out_channels)
def encode(self, x, edge_index):
x = self.conv1(x, edge_index)
x = x.relu()
return self.conv2(x, edge_index)
def decode(self, z, pos_edge_index, neg_edge_index):
edge_index = torch.cat([pos_edge_index, neg_edge_index], dim=-1)
return (z[edge_index[0]] * z[edge_index[1]]).sum(dim=-1)
def decode_all(self, z):
prob_adj = z @ z.t()
return (prob_adj > 0).nonzero(as_tuple=False).t()
用于做边预测的神经网络主要由两部分组成:其一是编码(encode),它与我们前面介绍的节点表征生成是一样的;其二是解码(decode),它根据边两端节点的表征生成边为真的几率(odds)。
可以看到,该神经网络编码部分含两个卷积层,一个ReLU层;解码部分首先将正负样本拼接,再对output_channel的计算结果进行加和求解。
3.3 定义训练、测试函数
def get_link_labels(pos_edge_index, neg_edge_index):
num_links = pos_edge_index.size(1) + neg_edge_index.size(1)
# ic(pos_edge_index.size(1))
link_labels = torch.zeros(num_links, dtype=torch.float)
link_labels[:pos_edge_index.size(1)] = 1.
# ic(link_labels.shape)
return link_labels
def train(data, model, optimizer):
model.train()
neg_edge_index = negative_sampling(
edge_index=data.train_pos_edge_index,
num_nodes=data.num_nodes,
num_neg_samples=data.train_pos_edge_index.size(1))
optimizer.zero_grad()
z = model.encode(data.x, data.train_pos_edge_index)
link_logits = model.decode(z, data.train_pos_edge_index, neg_edge_index)
link_labels = get_link_labels(data.train_pos_edge_index, neg_edge_index).to(data.x.device)
loss = F.binary_cross_entropy_with_logits(link_logits, link_labels)
loss.backward()
optimizer.step()
return loss
@torch.no_grad()
def test(data, model):
model.eval()
z = model.encode(data.x, data.train_pos_edge_index)
results = []
for prefix in ['val', 'test']:
pos_edge_index = data[f'{prefix}_pos_edge_index']
neg_edge_index = data[f'{prefix}_neg_edge_index']
link_logits = model.decode(z, pos_edge_index, neg_edge_index)
link_probs = link_logits.sigmoid()
link_labels = get_link_labels(pos_edge_index, neg_edge_index)
results.append(roc_auc_score(link_labels.cpu(), link_probs.cpu()))
return results
注:
-
在训练阶段,我们应该只见训练集,对验证集与测试集都是不可见的。所以我们没有使用所有的边,而是只用了训练集正样本边。
-
在验证与测试阶段,我们也应该只见训练集,对验证集与测试集都是不可见的。所以在验证与测试阶段,我们依然只用训练集正样本边。
3.4 主程序运行
def main(epoch, per_step_show):
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
dataset = 'Cora'
path = osp.join(osp.dirname(osp.realpath('E:')), 'Dataset', dataset)
dataset = Planetoid(path, dataset, transform=T.NormalizeFeatures())
data = dataset[0]
ground_truth_edge_index = data.edge_index.to(device)
data.train_mask = data.val_mask = data.test_mask = data.y = None
data = train_test_split_edges(data)
data = data.to(device)
hidden_channels_list2 = [200,100]
model = Net(dataset.num_features, 64).to(device)
optimizer = torch.optim.Adam(params=model.parameters(), lr=0.01)
best_val_auc = test_auc = 0
train_loss = []; val_list = []; tmp_test_list = []; test_list = [] # 新建空列表
for i in range(1, epoch):
loss = train(data, model, optimizer)
val_auc, tmp_test_auc = test2(data, model)
if val_auc > best_val_auc:
best_val_auc = val_auc
test_auc = tmp_test_auc
train_loss.append(loss); val_list.append(val_auc)
tmp_test_list.append(tmp_test_auc); test_list.append(test_auc)
if i % per_step_show == 0:
print(f'[Epoch: {i:03d}/{epoch}], Loss: {loss:.4f}, Val: {val_auc:.4f}, '
f'Test: {test_auc:.4f}')
# print(f'Epoch: {epoch:03d}, Loss: {loss:.4f}, Val: {val_auc:.4f}, '
# f'Test: {test_auc:.4f}')
z = model.encode(data.x, data.train_pos_edge_index)
final_edge_index = model.decode_all(z)
if __name__ == "__main__":
main(epoch=21, per_step_show=3)
3.5 【作业】使用Sequential容器构造图神经网络
import torch
from torch_geometric.nn import GCNConv
class Net2(torch.nn.Module):
def __init__(self, in_channels, hidden_channels_list, out_channels):
super(Net2, self).__init__()
hns = [in_channels] + hidden_channels_list
conv_list = []
for idx in range(len(hidden_channels_list)):
conv_list.append((GCNConv(hns[idx], hns[idx+1]), 'x, edge_index -> x'))
conv_list.append(ReLU(inplace=True),)
# ic(conv_list)
self.convseq = Sequential('x, edge_index', conv_list)
self.linear = Linear(hidden_channels_list[-1], out_channels)
def encode(self, x, edge_index):
x = self.convseq(x, edge_index)
x = self.linear(x)
return x
def decode(self, z, pos_edge_index, neg_edge_index):
edge_index = torch.cat([pos_edge_index, neg_edge_index], dim=-1)
return (z[edge_index[0]] * z[edge_index[1]]).sum(dim=-1)
def decode_all(self, z):
prob_adj = z @ z.t()
return (prob_adj > 0).nonzero(as_tuple=False).t()
3.6 【作业】负采样边是否会影响最终的学习效果
假设节点有n个,节点与节点间的关系可以存在n的平方种。
以Cora数据集举例,共有2708个节点,假设每个节点都与其他所有节点相连(包括本身),那么共存在2708*2708=7333264条边,而真实相连的边为8976条。
所以负样本是从其余的七百多万条边中去采样,因此即使采样到的负样本是验证集或测试集中的正样本,那么这种巧合的事情发生概率非常低,即使采集到了正样本,也可以作为噪声样本来加强模型的鲁棒性,甚至可能会提升模型的整体泛化能力。
Task4学习心得
本次任务的代码比较多,逐行理解起来花费了很多时间。恰逢前几天来到新的实验室,各种事务缠身,又不想随便凑合完成作业,导致完成作业的进度被拖后,太难了。。。
这次的内容还是比较有干货的,小数据集可以实现完全存储于内存,同时也完整进行了节点和边的预测任务。最重要收获的是大概熟悉了这些基本任务的流程,建立了一套自己的Pipline。
希望后面的任务能继续坚持下去,加油~
参考资料:
- Datawhale组队学习【图神经网络】
- InMemoryDataset
- https://github.com/chenjiyan2001/Datawhale-TeamLearning-StudyNotes/blob/main/2021/06/GNN/
- torch_geometric.nn.Sequential容器