数字信号处理笔记01(预备知识)
Ⅰ 信号
信号根据时间点的连续性分为连续时间信号 x ( t ) x(t) x(t)与离散时间信号 x [ n ] x[n] x[n],现实生活中的信号都是连续信号,但常常通过采样构建离散信号用于计算机处理。
Ⅰ.Ⅰ 信号能量与功率
有限连续信号: ① : E = ∫ t 1 t 2 ∣ x ( t ) ∣ 2 d t ①:E = \int_{t_1}^{t_2} |x(t)|^2{\rm d}t ①:E=∫t1t2∣x(t)∣2dt ② : P = 1 t 2 − t 1 ∫ t 1 t 2 ∣ x ( t ) ∣ 2 d t ②:P = \frac{1}{t_2-t_1}\int_{t_1}^{t_2} |x(t)|^2{\rm d}t ②:P=t2−t11∫t1t2∣x(t)∣2dt
无限连续信号: ① : E ∞ = lim T → ∞ 1 2 T ∫ − T T ∣ x ( t ) ∣ 2 d t = ∫ − ∞ + ∞ ∣ x ( t ) ∣ 2 d t ① :E_\infty = \lim_{T \to \infty} \frac{1}{2T} \int_{-T}^{T} |x(t)|^2{\rm d}t = \int_{-\infty}^{+\infty} |x(t)|^2{\rm d}t ①:E∞=T→∞lim2T1∫−TT∣x(t)∣2dt=∫−∞+∞∣x(t)∣2dt ② : P ∞ = lim T → ∞ 1 2 T ∫ − T T ∣ x ( t ) ∣ 2 d t ②:P_\infty = \lim_{T \to \infty} \frac{1}{2T} \int_{-T}^{T} |x(t)|^2{\rm d}t ②:P∞=T→∞lim2T1∫−TT∣x(t)∣2dt
有限数字信号: ① : E = ∑ n = n 1 n 2 ∣ x [ n ] ∣ 2 ①:E = \sum_{n={n_1}}^{n_2} |x[n]|^2 ①:E=n=n1∑n2∣x[n]∣2 ② : P = 1 n 2 − n 1 + 1 ∑ n = n 1 n 2 ∣ x [ n ] ∣ 2 ②:P = \frac{1}{n_2-n_1+1}\sum_{n={n_1}}^{n_2} |x[n]|^2 ②:P=n2−n1+11n=n1∑n2∣x[n]∣2
无限数字信号: ① : E ∞ = lim N → ∞ ∑ n = − N + N ∣ x [ n ] ∣ 2 = ∑ n = − ∞ + ∞ ∣ x [ n ] ∣ 2 ①:E_{\infty} = \lim_{N \to \infty} \sum_{n={-N}}^{+N}|x[n]|^2 = \sum_{n={-\infty}}^{+\infty} |x[n]|^2 ①:E∞=N→∞limn=−N∑+N∣x[n]∣2=n=−∞∑+∞∣x[n]∣2 ② : P ∞ = lim N → ∞ 1 2 N + 1 ∑ n = − N + N ∣ x [ n ] ∣ 2 ②:P_\infty = \lim_{N \to \infty} \frac{1}{2N+1}\sum_{n={-N}}^{+N}|x[n]|^2 ②:P∞=N→∞lim2N+11n=−N∑+N∣x[n]∣2
Ⅰ.Ⅱ 信号类型
① 周期信号:x(t) = x(t+T),使等式成立的最小正值T称为基波周期。
② (共轭)偶信号与(共轭)奇信号 ↔ \leftrightarrow ↔(复数)信号:任何信号都可以分解成偶信号与奇信号之和 ↔ \leftrightarrow ↔ x ( t ) = E V x(t) = E_V x(t)=EV{ x ( t ) x(t) x(t)} + O d + O_d +Od{ x ( t ) x(t) x(t)}。
偶部: E v E_v Ev{ x ( t ) x(t) x(t)} = 1 2 [ x ( t ) + x ( − t ) ] \frac{1}{2} [x(t) + x(-t)] 21[x(t)+x(−t)];
奇部: O d O_d Od{ x ( t ) x(t) x(t)} = 1 2 [ x ( t ) − x ( − t ) ] \frac{1}{2} [x(t) - x(-t)] 21[x(t)−x(−t)]。
③ 复指数信号:
连续时间:基波信号: e j w 0 t e^{jw_0t} ejw0t,谐波信号: e j k w 0 t e^{jkw_0t} ejkw0t, k k k = 0,±1,±2,…,直流信号: k k k=0时。
离散时间:基波信号: e j 2 π N 0 n e^{j\frac{2π}{N_0}n} ejN02πn,谐波信号: e j k 2 π N 0 n e^{jk\frac{2π}{N_0}n} ejkN02πn, k k k = 0,1,2,…, N 0 N_0 N0-1,直流信号: k k k=0时。
| e j w t e^{jwt} ejwt | e j w n e^{jwn} ejwn |
|---|---|
| w w w不同,信号也不同 | 频率相差 2 k π 2kπ 2kπ,信号相同 |
| 对于任何 w w w都是周期的 | 仅当 k w = 2 π kw=2π kw=2π, k k k为有理数才是周期的 |
| 有无数个谐波信号 | 只有 N N N个谐波信号 |
④ 单位冲激 δ [ n ] = { 1 , n = 0 0 , n ≠ 0 \delta[n] = \begin{cases} 1, & \text{$n$ = 0} \\[2ex] 0, & \text{$n \neq$ 0} \\ \end{cases} δ[n]=⎩⎨⎧1,0,n = 0n= 0
⑤ 单位阶跃
u [ n ] = { 1 , n ≥ 0 0 , n <0 u[n] = \begin{cases} 1, & \text{$n\geq$0} \\[2ex] 0, & \text{$n$<0} \end{cases} u[n]=⎩⎨⎧1,0,n≥0n<0
⑥ 能量信号( E ∞ < ∞ E_\infty<\infty E∞<∞, P ∞ = 0 P_\infty=0 P∞=0);功率信号( E ∞ = ∞ E_\infty=\infty E∞=∞, 0 < P ∞ < ∞ 0< P_\infty<\infty 0<P∞<∞);其它信号( E ∞ = ∞ E_\infty=\infty E∞=∞, P ∞ = ∞ P_\infty=\infty P∞=∞)。
Ⅰ.Ⅲ 基本运算
自变量变换(步骤:①先时移,②后时间尺度变换/时间反转)
① 时移(左加右减): x ( t − t 0 ) x(t-t_0) x(t−t0);
② 时间反转(关于 x x x轴对称,仅将 t t t符号改变): x ( − t ) x(-t) x(−t);
③ 时间尺度变换: x ( 2 t ) x(2t) x(2t), x ( t 2 ) x(\frac{t}{2}) x(2t)。
Ⅱ 系统
Ⅱ.Ⅰ 基本性质
① 记忆系统与无记忆系统(memory systems and memoryless systems):
若对自变量的每一个值,一个系统的输出仅仅取决于该时刻的输入,而与过去以及将来无关,则系统称为无记忆系统。
e . g . e.g. e.g. 记忆系统: y ( t ) = ∑ k = − ∞ n x [ k ] y(t) = \sum_{k = -\infty}^n x[k] y(t)=∑k=−∞nx[k] (累加器), y [ n ] = x [ n − 1 ] y[n] = x[n-1] y[n]=x[n−1](延时单元),
y ( t ) = 1 C ∫ − ∞ t x ( τ ) d τ \quad \quad \quad \quad \quad \quad y(t) = \frac{1}{C} \int_{-\infty}^t x(\tau){\rm d}\tau y(t)=C1∫−∞tx(τ)dτ (积分器), y [ n ] = x [ n ] − x [ n − 1 ] y[n] = x[n] - x[n-1] y[n]=x[n]−x[n−1](差分器);
\quad 无记忆系统: y ( t ) = x ( t ) y(t) = x(t) y(t)=x(t) (恒等系统)。
② 可逆性与可逆系统(invertibility and invertible systems):
一个系统如果在不同的输入下,导致不同的输出,就称该系统是可逆的(一一对应)。
e . g . e.g. e.g. 不可逆系统: y [ n ] = 0 y[n] = 0 y[n]=0, y [ n ] = x 2 [ n ] y[n] = x^2[n] y[n]=x2[n](有正负), y [ n ] = x [ n ] x [ n − 1 ] y[n] = x[n]x[n-1] y[n]=x[n]x[n−1]( δ [ n ] \delta[n] δ[n]),
y [ n ] = x [ 2 n ] \quad \quad \quad \quad \quad \quad \quad y[n] = x[2n] y[n]=x[2n](无法还原为 x [ n ] x[n] x[n])。
③ 因果性(causality):
如果一个系统在任何时刻的输出仅取决于当前及过去的输入,则成为因果系统(不可预测系统),由定义可知无记忆系统均为因果系统,因果系统不全是无记忆系统。
e . g . e.g. e.g. 因果系统: y [ n ] = x [ n ] − x [ n − 1 ] y[n] = x[n] - x[n-1] y[n]=x[n]−x[n−1], y ( t ) = ∑ k = − ∞ n x [ k ] y(t) = \sum_{k = -\infty}^n x[k] y(t)=∑k=−∞nx[k];
\quad 非因果系统: y [ n ] = x [ n ] − x [ n + 1 ] y[n] = x[n] - x[n+1] y[n]=x[n]−x[n+1], y [ n ] = x [ − n ] y[n] = x[-n] y[n]=x[−n], y [ n ] = x [ 2 n ] y[n] = x[2n] y[n]=x[2n]。
④ 稳定性(stability):
称输入有界,产生的输出也是有界的为稳定系统。
⑤ 时不变性(time-invariance):
若系统的特性(包括定义域)和行为不随时间改变,则该系统为时不变的。
推理:设 y 1 ( t ) = x 1 ( t ) y_1(t) = x_1(t) y1(t)=x1(t), y 2 ( t ) = x 2 ( t ) y_2(t) = x_2(t) y2(t)=x2(t),令 x 2 = x 1 ( t − t 0 ) x_2 = x_1(t-t_0) x2=x1(t−t0),则 y 2 ( t ) = x 1 ( t − t 0 ) y_2(t) = x_1(t-t_0) y2(t)=x1(t−t0);
\quad \quad \quad 若 y 1 ( t − t 0 ) = x 1 ( t − t 0 ) = y 2 ( t ) y_1(t-t_0) = x_1(t-t0) = y_2(t) y1(t−t0)=x1(t−t0)=y2(t),则 y ( t ) y(t) y(t)为时不变的。
⑥ 线性(linearity):
同时满足齐次性与可加性的系统为线性的。
e . g . e.g. e.g. 非线性: y ( t ) = 1 x ( t ) [ x ′ ( t ) ] 2 y(t) = \frac{1}{x(t)} [x^{'}(t)]^2 y(t)=x(t)1[x′(t)]2(满足齐次性,不满足可加性) 。
⑦ 增量线性系统(incrementally linear systems):
输入增量与输出增量间满足线性关系,任何增量线性系统都可以等效为一个线性系统(零状态响应)加上一部分与输入无关的响应(零输入响应)。
Ⅱ.Ⅱ 线性时不变系统(Linear Time-Invariant Systems)
对于复杂的输入信号,通过将其分解成基本信号的线性组合,并求得LTI系统对基本信号的响应,输出响应问题便转化成信号分解以及基本信号响应求解并线性组合的问题。
Ⅱ.Ⅱ.Ⅰ 信号分解(任何信号 x ( t ) x(t) x(t)都可以分解成单位脉冲信号的线性组合)
离散时间:
x [ n ] = ∑ k = − ∞ + ∞ x [ k ] δ [ n − k ] x[n] = \sum_{k=-\infty}^{+\infty} x[k]\delta[n-k] x[n]=k=−∞∑+∞x[k]δ[n−k]
连续时间:
x ( t ) = ∫ − ∞ + ∞ x ( τ ) δ ( t − τ ) d τ x(t) = \int_{-\infty}^{+\infty} x(\tau)\delta(t-\tau){\rm d}\tau x(t)=∫−∞+∞x(τ)δ(t−τ)dτ
Ⅱ.Ⅱ.Ⅱ 线性组合
① 卷积和(离散时间):
设一个LTI系统的对于 δ [ n − k ] \delta[n-k] δ[n−k]的响应为 h [ n − k ] h[n-k] h[n−k](单位脉冲响应),则输出响应为:
y [ n ] = ∑ k = − ∞ + ∞ x [ k ] h [ n − k ] = x [ n ] ∗ h [ n ] y[n] = \sum_{k=-\infty}^{+\infty} x[k]h[n-k] = x[n]*h[n] y[n]=k=−∞∑+∞x[k]h[n−k]=x[n]∗h[n]称上式操作为卷积和。卷积和计算方法:图解法、列表法、解析法。这里只介绍图解法。
图解法:利用卷积和公式,将一个信号(如 x [ n ] x[n] x[n])不动,另一信号经反转变成 h [ − k ] h[-k] h[−k],再将 n n n当成位移量,求 n n n取不同值情况下,乘积 x [ k ] h [ n − k ] x[k]h[n-k] x[k]h[n−k]的和,则得到 y [ n ] y[n] y[n]的分段表达式。
p s ps ps:图解法操作与自变量变换操作不同。
e . g . e.g. e.g. x [ n ] = { 1 , -2 ≤ n ≤ 2 0 , e l s e x[n] = \begin{cases} 1, & \text{-2 $\leq n \leq$ 2} \\[2ex] 0, & \text{$else$} \\ \end{cases} x[n]=⎩⎨⎧1,0,-2 ≤n≤ 2else
h [ n ] = { α n , α > 1 , 0 ≤ n ≤ 4 0 , e l s e h[n] = \begin{cases} \alpha^n, & \text{$\alpha > 1$, 0 $\leq n \leq$ 4} \\[2ex] 0, & \text{$else$} \\ \end{cases} h[n]=⎩⎨⎧αn,0,α>1, 0 ≤n≤ 4else求 y [ n ] y[n] y[n]
将 h [ n − k ] h[n-k] h[n−k]左右移位可知
当 { n < -4 o r n > 4 时 , y [ n ] = 0 -4 ≤ n ≤ 0 时 , y [ n ] = ∑ k = − 2 n + 2 α n − k 0 < n ≤ 4 时 , y [ n ] = ∑ k = n − 2 2 α n − k {\sf 当} \begin{cases} \text{$n < $ -4} \quad or \quad n >4时 ,& y[n] = 0 \\[2ex] \text{-4 $\leq n \leq $0}时,& y[n] = \sum_ {k=-2}^{n+2} \alpha^{n-k} \\[2ex] \text{0 $< n \leq $4}时,& y[n] = \sum_ {k=n-2}^{2} \alpha^{n-k} \\[2ex] \end{cases} 当⎩⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎧n< -4orn>4时,-4 ≤n≤0时,0 <n≤4时,y[n]=0y[n]=∑k=−2n+2αn−ky[n]=∑k=n−22αn−k
② 卷积积分(连续时间):
设一个LTI系统的对于 δ ( t − τ ) \delta(t-\tau) δ(t−τ)的响应为 h ( t − τ ) h(t-\tau) h(t−τ)(单位冲激响应),则输出响应为:
y ( t ) = ∫ − ∞ + ∞ x ( τ ) h ( t − τ ) d τ = x ( t ) ∗ h ( t ) y(t) = \int_{-\infty}^{+\infty} x(\tau)h(t-\tau){\rm d}\tau = x(t)*h(t) y(t)=∫−∞+∞x(τ)h(t−τ)dτ=x(t)∗h(t)称上式操作为卷积积分,与卷积和相似。卷积积分计算方法:图解法、列表法、解析法。这里只介绍图解法。
图解法:利用卷积积分公式,将一个信号(如 x ( τ ) x(\tau) x(τ))不动,另一信号经反转变成 h ( − τ ) h(-\tau) h(−τ),再将 t t t当成位移量,求 t t t取不同值情况下,乘积 x ( τ ) h ( t − τ ) x(\tau)h(t-\tau) x(τ)h(t−τ)的积分,则得到 y ( t ) y(t) y(t)的分段表达式。卷积和与卷积积分的基本思想是一致的。
③ 性质(交换律、分配律、结合律)
Ⅱ.Ⅱ.Ⅲ LTI系统性质
① 记忆性: y [ n ] = ∑ k = − ∞ + ∞ x [ k ] h [ n − k ] = ∑ k = − ∞ + ∞ h [ k ] x [ n − k ] y[n] = \sum_{k=-\infty}^{+\infty} x[k]h[n-k] = \sum_{k=-\infty}^{+\infty} h[k]x[n-k] y[n]=k=−∞∑+∞x[k]h[n−k]=k=−∞∑+∞h[k]x[n−k] = h [ k ] x [ n − k ] + . . . + h [ − 1 ] x [ n + 1 ] + h [ 0 ] x [ n ] + h [ 1 ] x [ n − 1 ] + . . . \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad \quad\quad\quad= h[k]x[n-k] + ... + h[-1]x[n+1] + h[0]x[n] + h[1]x[n-1] + ... =h[k]x[n−k]+...+h[−1]x[n+1]+h[0]x[n]+h[1]x[n−1]+...
当且仅当 h [ n ] = k δ [ n ] h[n] = k\delta[n] h[n]=kδ[n]时,系统为无记忆系统,连续时间同理。
② 可逆性:
对于一个可逆系统,其冲激响应或逆系统冲激响应 h ( t ) , h 1 ( t ) h(t), h_1(t) h(t),h1(t)满足 h ( t ) ∗ h 1 ( t ) = δ ( t ) h(t) \ast h_1(t) = \delta(t) h(t)∗h1(t)=δ(t), e . g . e.g. e.g. 可逆:累加器、延时器;不可逆:微分器、差分器。
③ 因果性:
由 y [ n ] = ∑ k = − ∞ + ∞ x [ k ] h [ n − k ] y[n] = \sum_{k=-\infty}^{+\infty} x[k]h[n-k] y[n]=k=−∞∑+∞x[k]h[n−k]与因果性定义得,当 k > n k > n k>n时, h [ n − k ] = 0 o r n < 0 h[n-k] = 0 \quad or \quad n <0 h[n−k]=0orn<0时 , h [ n ] = 0 h[n] = 0 h[n]=0。
④ 稳定性:
由 ∣ y [ n ] ∣ = ∣ ∑ k = − ∞ + ∞ x [ k ] h [ n − k ] ∣ ≤ ∑ k = − ∞ + ∞ ∣ x [ k ] h [ n − k ] ∣ ≤ A ∑ k = − ∞ + ∞ ∣ h [ k ] ∣ |y[n]| = |\!\sum_{k=-\infty}^{+\infty} x[k]h[n-k] \, \, \, | \leq \sum_{k=-\infty}^{+\infty} |x[k]h[n-k]| \leq A \sum_{k=-\infty}^{+\infty} |h[k]| ∣y[n]∣=∣k=−∞∑+∞x[k]h[n−k]∣≤k=−∞∑+∞∣x[k]h[n−k]∣≤Ak=−∞∑+∞∣h[k]∣与稳定性定义得,输入有界时,输出有界的充要条件是 h [ n ] h[n] h[n]绝对可和或 h ( t ) h(t) h(t)绝对可积。
⑤ 对单位阶跃信号的响应:
离散时间: s [ n ] = ∑ k = − ∞ + ∞ u [ k ] h [ n − k ] = ∑ k = − ∞ + ∞ u [ n − k ] h [ k ] = ∑ k = − ∞ n h [ k ] , h [ n ] = s [ n ] − s [ n − 1 ] s[n] = \sum_{k=-\infty}^{+\infty} u[k]h[n-k] = \sum_{k=-\infty}^{+\infty} u[n-k]h[k] = \sum_{k=-\infty}^n h[k], h[n] = s[n] - s[n-1] s[n]=k=−∞∑+∞u[k]h[n−k]=k=−∞∑+∞u[n−k]h[k]=k=−∞∑nh[k],h[n]=s[n]−s[n−1]
连续时间: s ( t ) = ∫ − ∞ + ∞ u ( τ ) h ( t − τ ) d τ = ∫ − ∞ + ∞ u ( t − τ ) h ( τ ) d τ = ∫ − ∞ t h ( τ ) d τ , h ( t ) = d s ( t ) d t s(t) = \int_{-\infty}^{+\infty} u(\tau)h(t-\tau){\rm d}\tau = \int_{-\infty}^{+\infty} u(t-\tau)h(\tau){\rm d}\tau = \int_{-\infty}^{t} h(\tau){\rm d}\tau,h(t) = \frac{{\rm d}s(t)}{{\rm d}t} s(t)=∫−∞+∞u(τ)h(t−τ)dτ=∫−∞+∞u(t−τ)h(τ)dτ=∫−∞th(τ)dτ,h(t)=dtds(t)
Ⅱ.Ⅲ 线性时不变系统的描述方法
LTI系统可以用数学方程组来表示,可以将输入输出问题转化为微方程的求解。
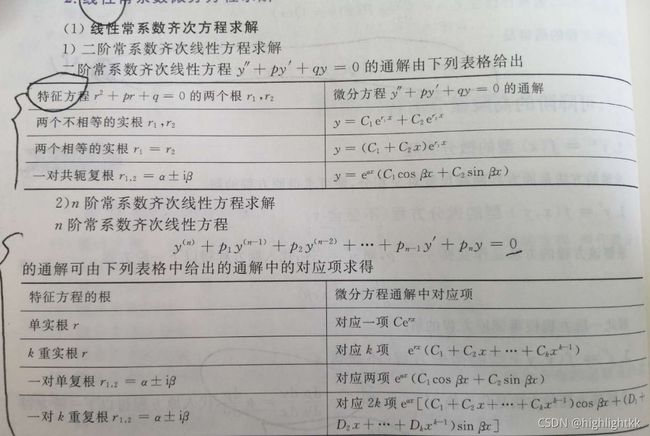
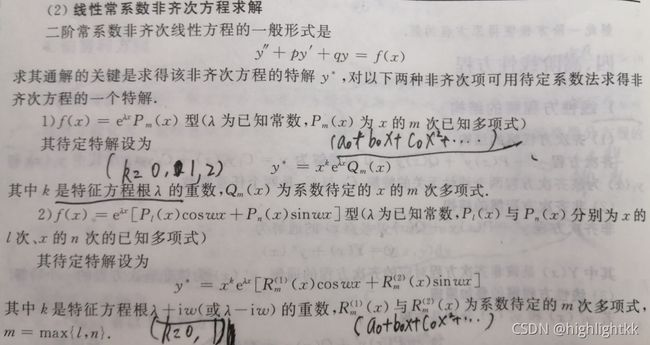
Ⅱ.Ⅲ.Ⅰ线性常系数微分方程(连续时间)
∑ k = 0 N A k y ( k ) ( t ) = ∑ k = 0 M B k x ( k ) ( t ) \sum_{k=0}^N A_k y^{(k)}(t) = \sum_{k=0}^M B_k x^{(k)}(t) k=0∑NAky(k)(t)=k=0∑MBkx(k)(t)
下图为高数中对线性常系数微分方程的求解:
Ⅱ.Ⅲ.Ⅱ 线性常系数差分方程(离散时间)
∑ k = 0 N A k y [ n − k ] = ∑ k = 0 M B k x [ n − k ] \sum_{k=0}^N A_k y[n-k] = \sum_{k=0}^M B_k x[n-k] k=0∑NAky[n−k]=k=0∑MBkx[n−k] ⇓ \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \qquad \quad\Downarrow ⇓ y [ n ] = 1 A 0 ( ∑ k = 0 M B k x [ n − k ] − ∑ k = 1 N A k y [ n − k ] ) y[n] = \frac{1}{A_0} \left (\sum_{k=0}^M B_k x[n-k] - \sum_{k=1}^N A_k y[n-k]\right) y[n]=A01(k=0∑MBkx[n−k]−k=1∑NAky[n−k])
由上式可知,若得到所有 n n n时刻的输入和一组附加条件 y [ − 1 ] , y [ − 2 ] , . . . , y [ − N ] y[-1], y[-2],...,y[-N] y[−1],y[−2],...,y[−N],便用迭代法求出 y [ 0 ] y[0] y[0],又可以通过 y [ 0 ] , y [ − 1 ] , y [ − 2 ] , . . . , y [ − N ] y[0],y[-1], y[-2],...,y[-N] y[0],y[−1],y[−2],...,y[−N]求出 y [ 1 ] y[1] y[1],从而递归求解出 n ≥ 0 n \geq 0 n≥0的所有解。这种方程描述的LTI系统称为 I I R ( I n f i n i t e I m p u l s e R e s p o n s e ) {\bf IIR(Infinite \, Impulse \, Response)} IIR(InfiniteImpulseResponse)系统。
若 A k = 0 时 A_k = 0时 Ak=0时,上式变为 y [ n ] = ∑ k = 0 M B k A 0 x [ n − k ] y[n] = \sum_{k=0}^M \frac{B_k }{A_0} x[n-k] y[n]=k=0∑MA0Bkx[n−k]
此时方程变为一个卷积和的形式,并且 h [ n ] = B n A 0 , 0 ≤ n ≤ M h[n] = \frac{B_n}{A_0},0 \leq n \leq M h[n]=A0Bn,0≤n≤M,这种方程描述的LTI系统称为 F I R ( F i n i t e I m p u l s e R e s p o n s e ) {\bf FIR(Finite \, Impulse \, Response)} FIR(FiniteImpulseResponse)系统。
Ⅱ.Ⅲ.Ⅲ 系统框图
① 基本结构:

② 直接Ⅰ型:
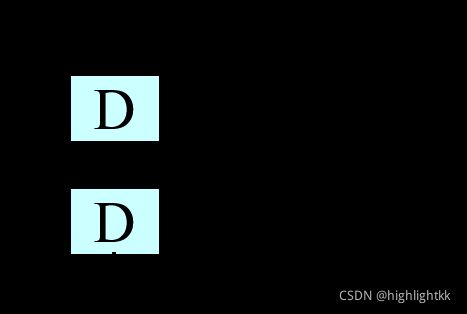
③ 直接Ⅱ型:

Ⅲ 常用公式:
Ⅲ.Ⅰ 欧拉公式: e j w n = c o s ( w n ) + j s i n ( w n ) e^{jwn}= cos(wn) + jsin(wn) ejwn=cos(wn)+jsin(wn)
常用性质:
① c o s ( w n ) = 1 2 ( e j w n + e − j w n ) cos(wn) = \frac{1}{2}(e^{jwn} + e^{-jwn}) cos(wn)=21(ejwn+e−jwn)
② s i n ( w n ) = 1 2 j ( e j w n − e − j w n ) sin(wn) = \frac{1}{2j}(e^{jwn} - e^{-jwn}) sin(wn)=2j1(ejwn−e−jwn)
③ e 2 k π n = 1 e^{2kπn} = 1 e2kπn=1