生成对抗网络(Generative Adversarial Nets, GANs)
文章目录
- GANs
- GANs理论推导
-
- 全局最优解
- 训练过程的收敛性
- 优缺点
代码实现: 基于Tensorflow2.2实现,代码见gitub。
参考文献
1. Generative Adversarial Nets
2. Understanding Generative Adversarial Networks (GANs)
3. 对抗生成网络学习(一)——GAN实现mnist手写数字生成(tensorflow实现)
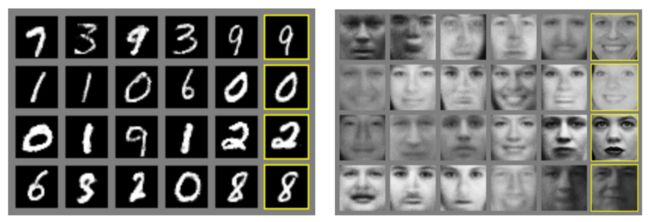
生成对抗网络(Generative Adversarial Networks,GANs)通过让两个神经网络相互博弈,生成器网络基于给定随机输入生成“假数据”,判别器网络负责识别“真假”数据,最终获得能够生成真实数据的生成器。
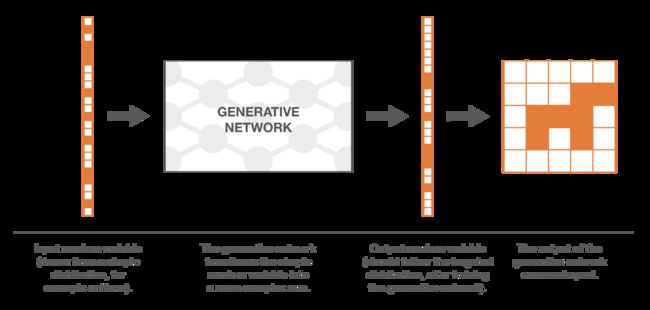
生成器主要需解决的问题是,将给定先验随机分布的向量,转换为服从期望分布的向量,因此这面临两个问题:第一个问题,期望分布复杂、高维;第二个问题,若已知样本是否来自于期望分布,我们该如何表达期望分布。
该如何解决上述两个问题呢?使用神经网络作为函数的变换方法,即使用“一个非常复杂的函数”将一个简单的M维随机变量映射为一个N维随机变量。这个复杂变换函数并不能直接通过取CDF(累积分布函数)闭式逆获得,需从真实分布中学习获得。
生成神经网络的训练有两种方法:直接方法和间接方法。直接方法就是生成匹配网络GMNs(不是本文重点,参考文献2),间接方法就是生成对抗网络。
GANs
生成对抗网络包含一个生成器 G G G(generator)和判别器 D D D(discriminator), G G G和 D D D均使用多层感知机。
- 定义生成器 G z ( z ; θ g ) G_z(z;\theta_g) Gz(z;θg),生成器将输入噪声先验分布 p z ( z ) p_z(z) pz(z)(如均匀分布、高斯分布),尽可能映射为真实数据分布。
- 定义判别器 D ( x ; θ d ) D(x;\theta_d) D(x;θd),判别器将输出映射为输出标量,表示数据来自于真实分布的概率。
训练判别器,使之尽可能区分输入来自于真实样本还是生成器生成样本;训练生成器,尽可能使判别器对其输出认为是来自于真实样本。因此,生成器和判别器互相对抗,优化判别器降低目标函数值、优化生成器提高目标函数值,目标函数表示为
min G max D V ( D , G ) = E x ∼ p d a t a [ log D ( x ) ] + E z ∼ p z [ log ( 1 − D ( G ( z ) ) ) ] (1) \min_G\max_D V(D, G)=\Bbb E_{x\sim p_{data}}[\log D(x)] + \Bbb E_{z\sim p_z}[\log (1-D(G(z)))] \tag 1 GminDmaxV(D,G)=Ex∼pdata[logD(x)]+Ez∼pz[log(1−D(G(z)))](1)
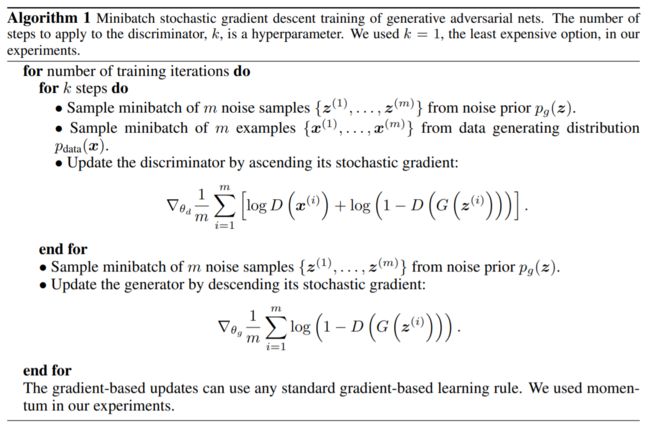
训练过程中不断优化判别器,在有限训练集下,可易造成overfitting。因此,我们依次执行:迭代 k k k步优化判别器(固定生成器),再迭代1步优化生成器(固定判别器),GANs的训练如下算法1所示:
实际训练时,若基于公式(1) 训练生成器,在训练前期,可能无法提供足够大的梯度更新生成器参数,这是因为 判别器在训练前期可以轻易地区分数据是否来自于真实分布, D ( G ( z ) ) → 0 D(G(z))\to 0 D(G(z))→0,即 log ( 1 − D ( G ( z ) ) ) \log(1-D(G(z))) log(1−D(G(z)))饱和,因此我们将生成器优化目标函数改为等价形式:
max G E z ∼ p z ( z ) [ log D ( G ( z ) ) ] \max_G \Bbb E_{z\sim p_z(z)}[\log D(G(z))] GmaxEz∼pz(z)[logD(G(z))]
理解为什么 log ( 1 − D ( G ( z ) ) ) \log (1-D(G(z))) log(1−D(G(z)))训练前期饱和?
令 x = D ( G ( z ) ) x = D(G(z)) x=D(G(z)), y = log ( 1 − x ) y=\log (1-x) y=log(1−x),则
∇ y = 1 / ( x − 1 ) , x → 0 + ⟹ ∇ y → − 1 \nabla y=1/(x-1), \quad x\to 0^+ \implies \nabla y \to -1 ∇y=1/(x−1),x→0+⟹∇y→−1若令 y ′ = log ( x ) y'=\log(x) y′=log(x),则
∇ y = 1 / x , x → 0 + ⟹ ∇ y → + ∞ \nabla y=1/x, \quad x\to 0^+ \implies \nabla y \to +\infty ∇y=1/x,x→0+⟹∇y→+∞
可见当 x → 0 + x\to 0^+ x→0+时, y ′ y' y′比 y y y的梯度更大,最大化 log D ( G ( z ) ) \log D(G(z)) logD(G(z))能够获得足够大的梯度更新生成器参数!此外, y ′ y' y′的梯度随着训练进行逐渐减小,这也符合参数更新策略。
GANs理论推导
生成器模型隐式定义了模型生成样本 G ( z ) G(z) G(z)的概率分布 p g p_g pg,其中模型输入 z z z服从概率分布 p ( z ) p(z) p(z)(随机噪声),通过训练我们想要尽可能使 p g p_g pg和 p d a t a p_{data} pdata同分布,使得生成器可以生成真实数据!
GANs训练过程中,生成器和判别器模型变化如下:

图1中,蓝色虚线表示判别器模型分布,黑点线表示训练样本分布,绿实线表示生成器生成的样本分布,上下水平线分别为 x x x和 z z z定义域的一部分,向上箭头表示生成器映射 x = G ( z ) x=G(z) x=G(z)如何将非均匀分布 p g p_g pg作用在转换后的样本上。
- a. 生成器生成样本分布 p g p_g pg近似于样本真实分布 p d a t a p_{data} pdata,判别器有一定的区分力;
- b. 判断器基本收敛;
- c. 判断器梯度引流 G ( z ) G(z) G(z)到更可能分类为真实数据的区域,数次更新后,生成器生成样本分布近似于真实样本分布;
- d. 生成器生成样本分布 p g p_g pg等于样本真实分布 p d a t a p_{data} pdata,判别器和生成器接近稳定点,无法继续更新,判别器将无法区分样本来自于真实分布还是生成分布,即随机预测,对应概率均为1/2,sigmoid输出为0,判别模型分布对应水平线;
全局最优解
固定任意生成器 G G G,则判别器 D D D的最优解为
D G ∗ ( x ) = p d a t a ( x ) p d a t a ( x ) + p g ( x ) (2) D_G^*(x)=\frac{p_{data}(x)}{p_{data}(x)+p_g(x)} \tag 2 DG∗(x)=pdata(x)+pg(x)pdata(x)(2)
给定任意生成器 G G G和判别器 D D D,最大化目标函数
V ( G , D ) = ∫ x p d a t a ( x ) log ( D ( x ) ) d x + ∫ z p z ( z ) log ( 1 − D ( G ( z ) ) ) d z = ∫ x p d a t a ( x ) log ( D ( x ) ) + p g ( x ) log ( 1 − D ( x ) ) d x (3) \begin{aligned} V(G, D) &=\int_xp_{data}(x)\log(D(x))\text dx + \int_zp_z(z)\log(1-D(G(z)))\text dz\\[1ex] &=\int_xp_{data}(x)\log(D(x)) + p_g(x)\log(1-D(x))\text dx \end{aligned} \tag 3 V(G,D)=∫xpdata(x)log(D(x))dx+∫zpz(z)log(1−D(G(z)))dz=∫xpdata(x)log(D(x))+pg(x)log(1−D(x))dx(3)
不理解dz到dx是如何变换的???x来自于真实数据集,而z来自于随机噪声分布,上式变换是不是已经假定x和G(z)同分布了!
对于任意 ( a , b ) ∈ R 2 (a, b)\in\R^2 (a,b)∈R2,函数 a log y + b log ( 1 − y ) a\log y+b\log(1-y) alogy+blog(1−y)在 [ 0 , 1 ] [0, 1] [0,1]区间内的最大值为 a / ( a + b ) a/(a+b) a/(a+b),因此判别器的最优解为公式(2)。
注意到,训练判别器的目标函数可解释为最大化条件概率分布 P ( Y ∣ x ) P(Y|x) P(Y∣x),其中 Y Y Y指示 x x x来自于真实分布 p d a t a p_{data} pdata,还是来自于生成分布 p g p_g pg。公式(1)最大最小化可被重塑为
C ( G ) = max D V ( G , D ) = E x ∼ p d a t a [ log D G ∗ ( x ) ] + E z ∼ p z [ log ( 1 − D G ∗ ( G ( z ) ) ) ] = E x ∼ p d a t a [ log D G ∗ ( x ) ] + E x ∼ p g [ log ( 1 − D G ∗ ( G ( x ) ) ) ] = E x ∼ p d a t a [ log p d a t a ( x ) p d a t a ( x ) + p g ( x ) ] + E x ∼ p g [ log p g ( x ) p d a t a ( x ) + p g ( x ) ] (4) \begin{aligned} C(G) &=\max_D V(G,D)\\[1ex] &=\Bbb E_{x\sim p_{data}}[\log D_G^*(x)]+\Bbb E_{z\sim p_z}[\log(1-D_G^*(G(z)))]\\[1ex] &=\Bbb E_{x\sim p_{data}}[\log D_G^*(x)]+\Bbb E_{x\sim p_g}[\log(1-D_G^*(G(x)))]\\[1ex] &=\Bbb E_{x\sim p_{data}}\left[\log \frac{p_{data}(x)}{p_{data}(x)+p_g(x)}\right] + \Bbb E_{x\sim p_{g}}\left[\log \frac{p_{g}(x)}{p_{data}(x)+p_g(x)}\right] \end{aligned}\tag 4 C(G)=DmaxV(G,D)=Ex∼pdata[logDG∗(x)]+Ez∼pz[log(1−DG∗(G(z)))]=Ex∼pdata[logDG∗(x)]+Ex∼pg[log(1−DG∗(G(x)))]=Ex∼pdata[logpdata(x)+pg(x)pdata(x)]+Ex∼pg[logpdata(x)+pg(x)pg(x)](4)
定理1. 当前仅当 p g = p d a t a p_g=p_{data} pg=pdata时,目标函数 C ( G ) C(G) C(G)获得最小值 − log 4 -\log 4 −log4,这意味极小化 C ( G ) C(G) C(G),使得分布 p g p_g pg逼近 p d a t a p_{data} pdata.
先证充分性,若 p g = p d a t a p_g=p_{data} pg=pdata,则 D G ∗ ( x ) = 1 / 2 D_G^*(x)=1/2 DG∗(x)=1/2,因此 C ( G ) = − log 4 C(G)=-\log 4 C(G)=−log4.
再证必要性,根据JS散度证明:
C ( G ) = K L ( p d a t a ∣ ∣ p d a t a + p g ) + K L ( p g ∣ ∣ p d a t a + p g ) = K L ( p d a t a ∣ ∣ p d a t a + p g 2 ) + K L ( p g ∣ ∣ p d a t a + p g 2 ) − 2 log 2 = 2 J S D ( p d a t a ∣ ∣ p g ) − log 4 \begin{aligned} C(G) &=KL(p_{data}||p_{data}+p_g)+KL(p_g||p_{data}+p_g)\\[1ex] &=\frac{}{}KL\left(p_{data}\Big|\Big|\frac{p_{data}+p_g}{2}\right)+\frac{}{}KL\left(p_{g}\Big|\Big|\frac{p_{data}+p_g}{2}\right)-2\log 2\\[2ex] &=2JSD(p_{data}||p_g)-\log 4 \end{aligned} C(G)=KL(pdata∣∣pdata+pg)+KL(pg∣∣pdata+pg)=KL(pdata∣∣∣∣∣∣2pdata+pg)+KL(pg∣∣∣∣∣∣2pdata+pg)−2log2=2JSD(pdata∣∣pg)−log4
当前仅当 p g = p d a t a p_g=p_{data} pg=pdata时,JS散度取极小值0,必要性得证。从KL角度理解,取两个KL散度取极小值0,当前仅当:
p d a t a = p d a t a + p g 2 = p g ⟹ p g = p d a t a p_{data}=\frac{p_{data}+p_g}{2}=p_g \implies p_g=p_{data} pdata=2pdata+pg=pg⟹pg=pdata
训练过程的收敛性
每次训练判别器时,固定生成器,若判别器可获得最优解,则生成器最大化目标函数:
V ( G , D G ∗ ) = max E x ∼ p d a t a [ log D G ∗ ( x ) ] + E x ∼ p g [ log ( 1 − D G ∗ ( x ) ) ] V(G, D_G^*)=\max \Bbb E_{x\sim p_{data}}[\log D_G^*(x)]+\Bbb E_{x\sim p_g}[\log(1-D_G^*(x))] V(G,DG∗)=maxEx∼pdata[logDG∗(x)]+Ex∼pg[log(1−DG∗(x))]
也就是说,若最大化 V ( G , D g ∗ ) V(G, D_g^*) V(G,Dg∗),则 p g p_g pg收敛至 p d a t a p_{data} pdata.
证明:
考虑 V ( G , D ) = U ( p g , D ) V(G, D)=U(p_g, D) V(G,D)=U(pg,D), U U U是关于 p g p_g pg的凸函数,则函数 U U U存在唯一最优解!如何证明 U U U是凸函数,此处省略。
优缺点
GANs缺点: 不能清晰地表达 p g ( x ) p_g(x) pg(x),而且生成器和判别器需同步训练,在未有效更新判别器前,生成器不能过度训练(过度训练生成器可能导致生成器将多数输入映射真实数据分布 P d a t a P_{data} Pdata中的相同样本),保证有足够的数据多样本建模/拟合真实数据分布 p d a t a p_{data} pdata,就像波尔曼兹机的负链一样,在不同迭代步见需保持最新。
GANs优点: 不需要马尔科夫链,使用BP算法更新参数,不需要近似推理,使得模型中可以添加各式各样的函数。此外,生成器不直接通过真实数据样本更新其参数,而是通过判别器输出的梯度更新,使得对抗模型具有以下统计优势。