第十一章 ESP32的两个UART实验
-
关注嘉友创科技公众号

- 源码地址:https://github.com/HX-IoT/ESP32-Developer-Guide
- ESP32开发指南QQ群:824870185,内有pdf版,排版整洁。
学习目的及目标
串口通信的原理
学习ESP32 的UART功能的配置
掌握UART收发测试程序
串口通讯协议简介
串口通讯(Serial Communication)是一种设备间非常常用的串行通讯方式,因为它简单便捷,大部分电子设备都支持该通讯方式,电子工程师在调试设备时也经常使用该通讯方式输出调试信息,ESP32自有一个串口用于程序下载和log打印,就是这个道理。
在计算机科学里,大部分复杂的问题都可以通过分层来简化。如芯片被分为内核层和片上外设;对于通讯协议,我们也以分层的方式来理解,最基本的是把它分为物理层和协议层。物理层规定通讯系统中具有机械、电子功能部分的特性,确保原始数据在物理媒体的传输。协议层主要规定通讯逻辑,统一收发双方的数据打包、解包标准。简单来说物理层规定我们用嘴巴还是用肢体来交流,协议层则规定我们用中文还是英文来交流。
物理层
串口通讯的物理层有很多标准及变种,我们主要讲解 RS-232标准 ,RS-232标准主要规定了信号的用途、通讯接口以及信号的电平标准。使用 RS-232标准的串口设备间常见的通讯结构如下。
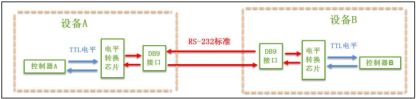
在上面的通讯方式中,两个通讯设备的“DB9 接口”之间通过串口信号线建立起连接,串口信号线中使用“RS-232 标准”传输数据信号。由于 RS-232电平标准的信号不能直接被控制器直接识别,所以这些信号会经过一个“电平转换芯片”转换成控制器能识别的“TTL校准”的电平信号,才能实现通讯。
协议层
串口通讯的数据包由发送设备通过自身的 TXD 接口传输到接收设备的 RXD 接口。在串口通讯的协议层中,规定了数据包的内容,它由启始位、主体数据、校验位以及停止位组成,通讯双方的数据包格式要约定一致才能正常收发数据,其组成如下:

波特率
本章中主要讲解的是串口异步通讯,异步通讯中由于没有时钟信号(如前面讲解的 DB9接口中是没有时钟信号的),所以两个通讯设备之间需要约定好波特率,即每个码元的长度,以便对信号进行解码,上图中用虚线分开的每一格就是代表一个码元。常见的波特率为4800、9600、115200等。
通讯的起始和停止信号
串口通讯的一个数据包从起始信号开始,直到停止信号结束。数据包的起始信号由一个逻辑 0的数据位表示,而数据包的停止信号可由 0.5、1、1.5或 2 个逻辑 1 的数据位表示,只要双方约定一致即可。
有效数据
在数据包的起始位之后紧接着的就是要传输的主体数据内容,也称为有效数据,有效数据的长度常被约定为 5、6、7或 8位长。
数据校验
在有效数据之后,有一个可选的数据校验位。由于数据通信相对更容易受到外部干扰导致传输数据出现偏差,可以在传输过程加上校验位来解决这个问题。校验方法有奇校验(odd)、偶校验(even)、0校验(space)、1校验(mark)以及无校验(noparity)。在无校验的情况下,数据包中不包含校验位。
硬件设计及原理
本实验板使用了ESP32的UART1和UART2,下表是我们的程序IO的映射。
| UART1 |
功能 |
映射ESP32的引脚 |
| TXD |
发送 |
IO5 |
| RXD |
接收 |
IO4 |
| UART2 |
功能 |
映射ESP32的引脚 |
| TXD |
发送 |
IO12 |
| RXD |
接收 |
IO13 |
若您使用的实验板 UART的连接方式或引脚不一样,只需根据我们的工程修改引脚即可,程序的控制原理相同。
软件设计
代码逻辑
ESP32的UART接口介绍
UART配置函数:uart_param_config();
| 函数原型 |
esp_err_t uart_param_config ( uart_port_t uart_num, const uart_config_t *uart_config ) |
| 函数功能 |
UART配置函数 |
| 参数 |
[in] uart_num:串口号,取值 UART_NUM_0 = 0x0, /*串口0,下载程序端口*/ UART_NUM_1 = 0x1, /*串口1*/ UART_NUM_2 = 0x2,/*串口2*/ [in] uart_config:串口参数配置
typedef struct { int baud_rate; /*波特率*/ uart_word_length_t data_bits; /*数据位*/ uart_parity_t parity; /*校验模式*/ uart_stop_bits_t stop_bits; /*停止位*/ uart_hw_flowcontrol_t flow_ctrl; /*硬件流控使能位*/ } uart_config_t; |
| 返回值 |
ESP_OK:成功 ESP_ERR_INVALID_ARG : 参数错误 |
UART的IO映射设置函数:uart_set_pin();
| 函数原型 |
esp_err_t uart_set_pin ( uart_port_t uart_num, int tx_io_num, int rx_io_num, int rts_io_num, int cts_io_num ) |
| 函数功能 |
UART的IO映射函数 |
| 参数 |
[in] uart_num:串口号,取值 [in] tx_io_num:发送引脚 [in] rx_io_num:接收引脚 [in] rts_io_num:rts流控引脚 [in] cts_io_num:cts流控引脚 |
| 返回值 |
ESP_OK:成功 ESP_ERR_INVALID_ARG : 参数错误 |
UART功能安装使能函数:uart_driver_install();
| 函数原型 |
esp_err_t uart_driver_install ( uart_port_t uart_num, int rx_buffer_size, int tx_buffer_size, int queue_size, QueueHandle_t* uart_queue, int intr_alloc_flags ) |
| 函数功能 |
UART功能安装使能函数 |
| 参数 |
[in] uart_num:串口号 [in] rx_buffer_size:接收缓存大小 [in] tx_buffer_size:发送缓存大小 [in] queue_size:队列大小 [in] uart_queue:串口队列指针 [in] intr_alloc_flags:分配中断标记 |
| 返回值 |
ESP_OK:成功 ESP_ERR_INVALID_ARG : 参数错误 |
UART发送函数:uart_write_bytes();
| 函数原型 |
int uart_write_bytes ( uart_port_t uart_num, const char* src, size_t size ) |
| 函数功能 |
UART发送函数函数 |
| 参数 |
[in] uart_num:串口号 [in] src:发送数据指针 [in]size:发送数据大小 |
| 返回值 |
(-1) :参数错误 (>=0):数据已放到发送缓存 |
UART读取函数:uart_read_bytes();
| 函数原型 |
int uart_read_bytes ( uart_port_t uart_num, uint8_t* buf, uint32_t length, TickType_t ticks_to_wait ) |
| 函数功能 |
UART读取函数 |
| 参数 |
[in] uart_num:串口号 [in] buf:接收数据指针 [in]length:接收数据最大大小 [in]ticks_to_wait:等待时间 |
| 返回值 |
(-1) :参数错误 (>=0):数据已放到发送缓存 |
更多更详细接口请参考官方指南。
串口收发代码编写
加载串口相关的头文件、定义串口IO映射引脚、定义串口缓存等。
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 |
#include #include "esp_system.h" #include "esp_spi_flash.h" #include "esp_wifi.h" #include "esp_event_loop.h" #include "esp_log.h" #include "esp_err.h" #include "nvs_flash.h" #include "freertos/FreeRTOS.h" #include "freertos/task.h" #include "driver/ledc.h" #include #include "freertos/FreeRTOS.h" #include "freertos/task.h" #include "driver/uart.h" #include "driver/gpio.h" #include "string.h" //UART1 #define RX1_BUF_SIZE (1024) #define TX1_BUF_SIZE (512) #define TXD1_PIN (GPIO_NUM_5) #define RXD1_PIN (GPIO_NUM_4) //UART2 #define RX2_BUF_SIZE (1024) #define TX2_BUF_SIZE (512) #define TXD2_PIN (GPIO_NUM_12) #define RXD2_PIN (GPIO_NUM_13) |
串口配置函数
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 |
void uart_init(void) { //串口配置结构体 uart_config_t uart1_config,uart2_config; //串口参数配置->uart1 uart1_config.baud_rate = 115200; //波特率 uart1_config.data_bits = UART_DATA_8_BITS; //数据位 uart1_config.parity = UART_PARITY_DISABLE; //校验位 uart1_config.stop_bits = UART_STOP_BITS_1; //停止位 uart1_config.flow_ctrl = UART_HW_FLOWCTRL_DISABLE; //硬件流控 uart_param_config(UART_NUM_1, &uart1_config); //设置串口 //IO映射-> T:IO4 R:IO5 uart_set_pin(UART_NUM_1, TXD1_PIN, RXD1_PIN, UART_PIN_NO_CHANGE, UART_PIN_NO_CHANGE); //注册串口服务即使能+设置缓存区大小 uart_driver_install(UART_NUM_1, RX1_BUF_SIZE * 2, TX1_BUF_SIZE * 2, 0, NULL, 0);
//串口参数配置->uart2 uart2_config.baud_rate = 115200; //波特率 uart2_config.data_bits = UART_DATA_8_BITS; //数据位 uart2_config.parity = UART_PARITY_DISABLE; //校验位 uart2_config.stop_bits = UART_STOP_BITS_1; //停止位 uart2_config.flow_ctrl = UART_HW_FLOWCTRL_DISABLE; //硬件流控 uart_param_config(UART_NUM_2, &uart2_config); //设置串口 //IO映射-> T:IO12 R:IO13 uart_set_pin(UART_NUM_2, TXD2_PIN, RXD2_PIN, UART_PIN_NO_CHANGE, UART_PIN_NO_CHANGE); //注册串口服务即使能+设置缓存区大小 uart_driver_install(UART_NUM_2, RX2_BUF_SIZE * 2, TX2_BUF_SIZE * 2, 0, NULL, 0); } |
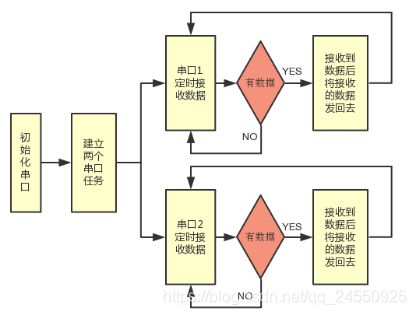
主函数:串口初始化、创建两个任务用于串口数据接收、测试串口发送数据等。
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
/* * 应用程序的函数入口 */ void app_main() { //串口初始化 uart_init(); //创建串口1接收任务 xTaskCreate(uart1_rx_task, "uart1_rx_task", 1024*2, NULL, configMAX_PRIORITIES, NULL); //创建串口2接收任务 xTaskCreate(uart2_rx_task, "uart2_rx_task", 1024*2, NULL, configMAX_PRIORITIES-1, NULL); //串口1数据发送测试 uart_write_bytes(UART_NUM_1, "uart1 test OK ", strlen("uart1 test OK ")); //串口2数据发送测试 uart_write_bytes(UART_NUM_2, "uart2 test OK ", strlen("uart2 test OK ")); } |
两个串口任务
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 |
/* * 串口1接收任务 */ void uart1_rx_task() { uint8_t* data = (uint8_t*) malloc(RX1_BUF_SIZE+1);//分配内存,用于串口接收 while (1) { //获取串口1接收的数据 const int rxBytes = uart_read_bytes(UART_NUM_1, data, RX1_BUF_SIZE, 10 / portTICK_RATE_MS); if (rxBytes > 0) { data[rxBytes] = 0;//在串口接收的数据增加结束符 //将接收到的数据发出去 uart_write_bytes(UART_NUM_1, (char *)data, rxBytes); } } free(data);//释放申请的内存 } /* * 串口2接收任务:基本同上,省略 */ |
硬件连接
可按照IO映射表将串口1和串口2的IO接到USB转串口电路上,每次可接一个。如下图是串口1接线图。

效果展示

UART总结
乐鑫已经把串口部分的API封装的非常好,直接在任务重解析数据即可。
串口发送32字节,50ms周期发送1小时无丢包
串口发送32字节,1ms发送5分钟无死机
串口部分初步测试完成
源码地址:https://github.com/xiaolongba/wireless-tech