PX4-AutoPilot教程--uORB主题订阅发布机制理解、应用和代码阅读
uORB主题订阅发布机制
PX4/Pixhawk的软件体系结构
PX4/Pixhawk的软件体系结构主要被分为四个层次,这可以让我们更好的理解PX4/Pixhawk的软件架构和运作:
- 应用程序的API:这个接口提供给应用程序开发人员,此API旨在尽可能的精简、扁平及隐藏其复杂性。
- 应用程序框架: 这是为操作基础飞行控制的默认程序集(节点)。
- 库: 这一层包含了所有的系统库和基本交通控制的函数。
- 操作系统: 最后一层提供硬件驱动程序,网络,UAVCAN和故障安全系统。

uORB(Micro Object Request Broker,微对象请求代理器)是PX4/Pixhawk系统中非常重要且关键的一个模块,它肩负了整个系统的数据传输任务,所有的传感器数据、GPS、PPM信号等都要从芯片获取后通过uORB进行传输到各个模块进行计算处理。实际上uORB是一套跨「进程」 的IPC通讯模块。在Pixhawk中, 所有的功能被独立以进程模块为单位进行实现并工作。而进程间的数据交互就由为重要,必须要能够符合实时、有序的特点。
Pixhawk使用的是NuttX实时ARM系统,uORB实际上是多个进程打开同一个设备文件,进程间通过此文件节点进行数据交互和共享。进程通过命名的「总线」交换的消息称之为「主题」(topic),在Pixhawk 中,一个主题仅包含一种消息类型,通俗点就是数据类型。每个进程可以「订阅」或者「发布」主题,可以存在多个发布者,或者一个进程可以订阅多个主题,但是一条总线上始终只有一条消息。
PX4/Pixhawk应用程序框架

应用层中操作基础飞行的应用之间都是隔离的,这样提供了一种安保模式,以确保基础操作独立的高级别系统状态的稳定性。而沟通它们的就是uORB。
uORB文件夹说明
uORB文件夹结构

文件/目录说明
topics : 系统通用接口定义的标准主题,比如电池电量转态、GPS的位置参数等
module.mk : uORB模块makefile文件
objects_common.cpp: 通用接口标准主题定义集合,如添加新主题在这里定义
ORBMap.hpp : 对象请求器节点链表管理(驱动节点)
ORBSet.hpp : 对象请求器节点管理(非驱动节点)
Publication.cpp : 在不同的发布中遍历使用
Publication.hpp : 在不同的发布中遍历使用
Subscription.cpp : 在不同的订阅中遍历使用
Subscription.hpp : 在不同的订阅中遍历使用
uORB.cpp : uORB的实现
uORB.h : uORB头文件
uORBCommon.hpp : uORB公共部分变量定义实现
uORBCommunicator.hpp : 远程订阅的接口实现,实现了对不同的通信通道管理,如添加/移除订阅者,可以基于TCP/IP或fastRPC;传递给通信链路的实现,以提供在信道上接收消息的回调。
uORBDevices.hpp :
uORBDevices_nuttx.cpp : 节点操作,close,open,read,write
uORBDevices_nuttx.hpp :
uORBDevices_posix.cpp :
uORBDevices_posix.hpp :
uORBMain.cpp : uORB入口
uORBManager.hpp : uORB功能函数实现头文件
uORBManager_nuttx.cpp : uORB功能函数实现(Nuttx)
uORBManager_posix.cpp : uORB功能函数实现(Posix)
uORBTest_UnitTest.cpp : uORB测试
uORBTest_UnitTest.hpp : uORB测试头文件,包括主题定义和声明等
uORBUtiles.cpp :
uORBUtiles.hpp :
常用函数功能解析
发布主题 先公告,再发布
orb_advert_t orb_advertise(const struct orb_metadata *meta, const void *data)
功能:公告发布者的主题;
说明:在发布主题之前是必须的;否则订阅者虽然能订阅,但是得不到数据;
参数:
meta:uORB元对象,可以认为是主题id,一般是通过ORB_ID(主题名)来赋值;
data:指向一个已被初始化,发布者要发布的数据存储变量的指针;
返回值:
错误则返回ERROR;成功则返回一个可以发布主题的句柄;如果待发布的主题没有定义或声明则会返回-1,然后会将errno赋值为ENOENT;
eg:
struct vehicle_attitude_s att;
memset(&att, 0, sizeof(att));
int att_pub_fd = orb_advertise(ORB_ID(vehicle_attitude), &att);
int orb_publish(const struct orb_metadata *meta, orb_advert_t handle, const void *data)
功能:发布新数据到主题;
参数:
meta:uORB元对象,可以认为是主题id,一般是通过ORB_ID(主题名)来赋值;
handle:orb_advertise函数返回的句柄;
data:指向待发布数据的指针;
返回值:
OK表示成功;错误返回ERROR;否则则有根据的去设置errno;
eg:
orb_publish(ORB_ID(vehicle_attitude), att_pub_fd, &att);
订阅主题 先关注,检查更新,再拷贝
int orb_subscribe(const struct orb_metadata *meta)
功能:订阅主题(topic);
说明:即使订阅的主题没有被公告,但是也能订阅成功;但是在这种情况下,却得不到数据,直到主题被公告;
参数:
meta:uORB元对象,可以认为是主题id,一般是通过ORB_ID(主题名)来赋值;
返回值:
错误则返回ERROR;成功则返回一个可以读取数据、更新话题的句柄;如果待订阅的主题没有定义或声明则会返回-1,然后会将errno赋值为ENOENT;
eg:
int fd = orb_subscribe(ORB_ID(topicName));
int poll(struct pollfd fds[], nfds_t nfds, int timeout)
功能:监控文件描述符(多个);
说明:timemout=0,poll()函数立即返回而不阻塞;timeout=INFTIM(-1),poll()会一直阻塞下去,直到检测到return > 0;
参数:
fds:struct pollfd结构类型的数组;
nfds:用于标记数组fds中的结构体元素的总数量;
timeout:是poll函数调用阻塞的时间,单位:毫秒;
返回值:
>0:数组fds中准备好读、写或出错状态的那些socket描述符的总数量;
==0:poll()函数会阻塞timeout所指定的毫秒时间长度之后返回;
-1:poll函数调用失败;同时会自动设置全局变量errno;
int orb_check(int handle, bool *updated)
功能:订阅者可以用来检查一个主题在发布者上一次更新数据后,有没有订阅者调用过ob_copy来接收、处理过;
说明:如果主题在在被公告前就有人订阅,那么这个API将返回“not-updated”直到主题被公告。可以不用poll,只用这个函数实现数据的获取。
参数:
handle:主题句柄;
updated:如果当最后一次更新的数据被获取了,检测到并设置updated为ture;
返回值:
OK表示检测成功;错误返回ERROR;否则则有根据的去设置errno;
eg:
if (PX4_OK != orb_check(sfd, &updated)) {
return printf("check(1) failed");
}
if (updated) {
return printf("spurious updated flag");
}
//or
bool updated;
struct random_integer_data rd;
/* check to see whether the topic has updated since the last time we read it */
orb_check(topic_handle, &updated);
if (updated) {
/* make a local copy of the updated data structure */
orb_copy(ORB_ID(random_integer), topic_handle, &rd);
printf("Random integer is now %d\n", rd.r);
}
int orb_copy(const struct orb_metadata *meta, int handle, void *buffer)
功能:从订阅的主题中获取数据并将数据保存到buffer中;
参数:
meta:uORB元对象,可以认为是主题id,一般是通过ORB_ID(主题名)来赋值;
handle:订阅主题返回的句柄;
buffer:从主题中获取的数据;
返回值:
返回OK表示获取数据成功,错误返回ERROR;否则则有根据的去设置errno;
eg:
struct sensor_combined_s raw;
orb_copy(ORB_ID(sensor_combined), sensor_sub_fd, &raw);
其他
int orb_set_interval(int handle, unsigned interval)
功能:设置订阅的最小时间间隔;
说明:如果设置了,则在这间隔内发布的数据将订阅不到;需要注意的是,设置后,第一次的数据订阅还是由起初设置的频率来获取,
参数:
handle:orb_subscribe函数返回的句柄;
interval:间隔时间,单位ms;
返回值:
OK表示成功;错误返回ERROR;否则则有根据的去设置errno;
eg:
orb_set_interval(sensor_sub_fd, 1000);
orb_advert_t orb_advertise_multi(const struct orb_metadata *meta, const void *data, int *instance, int priority)
功能:设备/驱动器的多个实例实现公告,利用此函数可以注册多个类似的驱动程序;
说明:例如在飞行器中有多个相同的传感器,那他们的数据类型则类似,不必要注册几个不同的话题;
参数:
meta:uORB元对象,可以认为是主题id,一般是通过ORB_ID(主题名)来赋值;
data:指向一个已被初始化,发布者要发布的数据存储变量的指针;
instance:整型指针,指向实例的ID(从0开始);
priority:实例的优先级。如果用户订阅多个实例,优先级的设定可以使用户使用优先级高的最优数据源;
返回值:
错误则返回ERROR;成功则返回一个可以发布主题的句柄;如果待发布的主题没有定义或声明则会返回-1,然后会将errno赋值为ENOENT;
eg:
struct orb_test t;
t.val = 0;
int instance0;
orb_advert_t pfd0 = orb_advertise_multi(ORB_ID(orb_multitest), &t, &instance0, ORB_PRIO_MAX);
int orb_subscribe_multi(const struct orb_metadata *meta, unsigned instance)
功能:订阅主题(topic);
说明:通过实例的ID索引来确定是主题的哪个实例;
参数:
meta:uORB元对象,可以认为是主题id,一般是通过ORB_ID(主题名)来赋值;
instance:主题实例ID;实例ID=0与orb_subscribe()实现相同;
返回值:
错误则返回ERROR;成功则返回一个可以读取数据、更新话题的句柄;如果待订阅的主题没有定义或声明则会返回-1,然后会将errno赋值为ENOENT;
eg:
int sfd1 = orb_subscribe_multi(ORB_ID(orb_multitest), 1);
int orb_unsubscribe(int handle)
功能:取消订阅主题;
参数:
handle:主题句柄;
返回值:
OK表示成功;错误返回ERROR;否则则有根据的去设置errno;
eg:
ret = orb_unsubscribe(handle);
int orb_stat(int handle, uint64_t *time)
功能:订阅者可以用来检查一个主题最后的发布时间;
参数:
handle:主题句柄;
time:存放主题最后发布的时间;0表示该主题没有发布或公告;
返回值:
OK表示检测成功;错误返回ERROR;否则则有根据的去设置errno;
eg:
ret = orb_stat(handle,time);
int orb_exists(const struct orb_metadata *meta, int instance)
功能:检测一个主题是否存在;
参数:
meta:uORB元对象,可以认为是主题id,一般是通过ORB_ID(主题名)来赋值;
instance:ORB 实例ID;
返回值:
OK表示检测成功;错误返回ERROR;否则则有根据的去设置errno;
eg:
ret = orb_exists(ORB_ID(vehicle_attitude),0);
int orb_priority(int handle, int *priority)
功能:获取主题优先级别;
参数:
handle:主题句柄;
priority:存放获取的优先级别;
返回值:
OK表示检测成功;错误返回ERROR;否则则有根据的去设置errno;
eg:
ret = orb_priority(handle,&priority);
例程实战
订阅和发布主题
这里的例程来自于Firmware1.6.0版本中的px4_simple_app.c文件,为了方便理解,进行了一定的改动,其位置位于Firmware/src/examples/px4_simple_app/px4_simple_app.c。
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
//主函数声明
__EXPORT int px4_simple_app_main(int argc, char *argv[]);
这里
__EXPORT是一个宏定义,其定义在Firmware/src/modules/systemlib/visibility.h中#ifdef __EXPORT # undef __EXPORT//这里#后面的空格语法上是正确的,但不推荐这样写 #endif #define __EXPORT __attribute__((visibility("default"))) #ifdef __PRIVATE # undef __PRIVATE//这里#后面的空格语法上是正确的,但不推荐这样写 #endif #define __PRIVATE __attribute__((visibility("hidden")))
__attribute__()函数用于设置动态链接库中函数的可见性,将变量或函数设置为default,则该符号可在其他动态链接库中可见;将变量或函数设置为hidden,则该符号仅在本动态链接库中可见,在其他库中不可见。编写大型程序时默认隐藏,针对特定变量和函数,在代码中使用
__attribute__((visibility("default")))令该符号外部可见,这种方法可有效避免动态链接库之间的符号冲突。(近似于类中的访问权限:public, private, protected)
int px4_simple_app_main(int argc, char *argv[])
{
//在终端打印Hello Sky!
PX4_INFO("Hello Sky!\n");
//订阅sensor_combined主题
int sensor_sub_fd = orb_subscribe(ORB_ID(sensor_combined));
这里调用了两个函数。
int orb_subscribe(const struct orb_metadata *meta)功能:订阅主题(topic); 说明:即使订阅的主题没有被公告,但是也能订阅成功;但是在这种情况下,却得不到数据,直到主题被公告; 参数: meta:uORB元对象,可以认为是主题id,一般是通过ORB_ID(主题名)来赋值; 返回值: 错误则返回ERROR;成功则返回一个可以读取数据、更新话题的句柄;如果待订阅的主题没有定义或声明则会返回-1,然后会将errno赋值为ENOENT; eg: int fd = orb_subscribe(ORB_ID(topicName));
ORB_ID(topicName)功能:得到主题ID 参数:topicName主题的名字 返回值:主题ID这里先由主题名字得到主题ID,再通过主题ID订阅sensor_combined主题,返回值是这个主题的句柄。
sensor_combined主题中存放的是陀螺仪、加速度计、磁力计的数据。
//限制更新速率5Hz
orb_set_interval(sensor_sub_fd, 200);
int orb_set_interval(int handle, unsigned interval)功能:设置订阅的最小时间间隔; 说明:如果设置了,则在这间隔内发布的数据将订阅不到;需要注意的是,设置后,第一次的数据订阅还是由起初设置的频率来获取, 参数: handle:orb_subscribe函数返回的句柄; interval:间隔时间,单位ms; 返回值: OK表示成功;错误返回ERROR;否则则有根据的去设置errno; eg: orb_set_interval(sensor_sub_fd, 1000);这里设置了每200ms去订阅一次,看是否到来。
//这里vehicle_attitude_s跟sensor_combined_s是一样的,是系统自动定义的结构体
struct vehicle_attitude_s att;
//这个函数的作用是把结构体att中的所有成员都赋值0
memset(&att, 0, sizeof(att));
vehicle_attitude主题中的数据在Firmware/msg/vehicle_attitude.msg文件中定义。系统自动生成的
vehicle_attitude_s结构体类型中的成员就是下列中的各个变量。float32 rollspeed # Angular velocity about body north axis (x) in rad/s float32 pitchspeed # Angular velocity about body east axis (y) in rad/s float32 yawspeed # Angular velocity about body down axis (z) in rad/s float32[4] q # Quaternion (NED)
//公告vehicle_attitude主题
orb_advert_t att_pub = orb_advertise(ORB_ID(vehicle_attitude), &att);
orb_advert_t orb_advertise(const struct orb_metadata *meta, const void *data)功能:公告发布者的主题; 说明:在发布主题之前是必须的;否则订阅者虽然能订阅,但是得不到数据; 参数: meta:uORB元对象,可以认为是主题id,一般是通过ORB_ID(主题名)来赋值; data:指向一个已被初始化,发布者要发布的数据存储变量的指针; 返回值: 错误则返回ERROR;成功则返回一个可以发布主题的句柄;如果待发布的主题没有定义或声明则会返回-1,然后会将errno赋值为ENOENT; eg: struct vehicle_attitude_s att; memset(&att, 0, sizeof(att)); int att_pub_fd = orb_advertise(ORB_ID(vehicle_attitude), &att);
/*一个应用可以等待多个主题,在这里只等待一个主题*/
px4_pollfd_struct_t fds[] =
{
{ .fd = sensor_sub_fd, .events = POLLIN },
/* 这里可以添加更多的文件描述符;
* { .fd = other_sub_fd, .events = POLLIN },
*/
};
这里
px4_pollfd_struct_t是类型名,fds是结构体数组名,这里在Firmware/src/platforms/px4_posix.h文件中使用typedef struct pollfd px4_pollfd_struct_t语句将结构体类型名改成px4_pollfd_struct_t。这里找到了
px4_pollfd_struct_t这个结构体的定义,里边存放的主要的三个变量分别为:fd,events,revents。fd用来存放文件描述符(可以读取数据、更新话题的句柄),events用来存放文件描述符fd上感兴趣的事件,revents用来存放文件描述符fd上实际发生的事件。typedef struct { /* This part of the struct is POSIX-like */ int fd; /* The descriptor being polled */ pollevent_t events; /* The input event flags */ pollevent_t revents; /* The output event flags */ /* Required for PX4 compatibility */ px4_sem_t *sem; /* Pointer to semaphore used to post output event */ void *priv; /* For use by drivers */ } px4_pollfd_struct_t;经常检测的事件标记: POLLIN/POLLRDNORM(可读)、POLLOUT/POLLWRNORM(可写)、POLLERR(出错)
如果是对一个描述符上的多个事件感兴趣的话,可以把这些常量标记之间进行按位或运算就可以了,如:
.events=POLLIN | POLLOUT | POLLERR;
int error_counter = 0;
for (int i = 0; i < 5; i++)
{
/*****poll函数调用阻塞的时间为1s*****/
int poll_ret = poll(fds, 1, 1000);
int poll(struct pollfd fds[], nfds_t nfds, int timeout)功能:监控文件描述符(多个); 说明:timemout=0,poll()函数立即返回而不阻塞;timeout=INFTIM(-1),poll()会一直阻塞下去,直到检测到return > 0; 参数: fds:struct pollfd结构类型的数组; nfds:用于标记数组fds中的结构体元素的总数量; timeout:是poll函数调用阻塞的时间,单位:毫秒; 返回值: >0:数组fds中准备好读、写或出错状态的那些socket描述符的总数量; ==0:poll()函数会阻塞timeout所指定的毫秒时间长度之后返回; -1:poll函数调用失败;同时会自动设置全局变量errno;这里返回值会赋值给
poll_ret,后续会对返回值进行分类处理。
/*处理poll返回的结果 */
if (poll_ret == 0)
{
/* 这表示时间溢出了,在1s内没有获取到发布者的数据 */
PX4_ERR("Got no data within a second");
//这个函数会将信息记录在日志中
}
else if (poll_ret < 0)
{
/* 出现问题 */
if (error_counter < 10 || error_counter % 50 == 0)
{
/*使用计数器来防止溢出(并减缓我们的速度)*/
PX4_ERR("ERROR return value from poll(): %d", poll_ret);
//这个函数会将信息记录在日志中
}
error_counter++;
}
else
{
if (fds[0].revents & POLLIN)
{
/*从文件描述符中获取订阅的数据*/
struct sensor_combined_s raw;
if (fds[0].revents & POLLIN),如果结构体数组中的第1项fds[0].revents是POLLIN,说明此时主题是可读的。那么fds[0].revents & POLLIN的值就是1。结构体类型
sensor_combined_s是系统根据sensor_combined主题中的数据类型和个数自动创建的一个结构体类型,后面会说。
/*****复制主题携带的数据到指定的结构体*****/
orb_copy(ORB_ID(sensor_combined), sensor_sub_fd, &raw);
int orb_copy(const struct orb_metadata *meta, int handle, void *buffer)功能:从订阅的主题中获取数据并将数据保存到buffer中; 参数: meta:uORB元对象,可以认为是主题id,一般是通过ORB_ID(主题名)来赋值; handle:订阅主题返回的句柄; buffer:从主题中获取的数据; 返回值: 返回OK表示获取数据成功,错误返回ERROR;否则则有根据的去设置errno; eg: struct sensor_combined_s raw; orb_copy(ORB_ID(sensor_combined), sensor_sub_fd, &raw);这里把sensor_combined主题中的数据赋值到结构体
raw中。
PX4_INFO("[px4_simple_app] Accelerometer:\t%8.4f\t%8.4f\t%8.4f\n",
(double)raw.accelerometer_m_s2[0],
(double)raw.accelerometer_m_s2[1],
(double)raw.accelerometer_m_s2[2]);
这里将加速度计数据打印出来。
sensor_combined主题中的数据在Firmware/msg/sensor_combined.msg文件中定义。系统自动生成的
sensor_combined_s结构体类型中的成员就是下列中的各个变量。int32 RELATIVE_TIMESTAMP_INVALID = 2147483647 # (0x7fffffff) If one of the relative timestamps is set to this value, it means the associated sensor values are invalid # gyro timstamp is equal to the timestamp of the message float32[3] gyro_rad # average angular rate measured in the XYZ body frame in rad/s over the last gyro sampling period float32 gyro_integral_dt # gyro measurement sampling period in s int32 accelerometer_timestamp_relative # timestamp + accelerometer_timestamp_relative = Accelerometer timestamp float32[3] accelerometer_m_s2 # average value acceleration measured in the XYZ body frame in m/s/s over the last accelerometer sampling period float32 accelerometer_integral_dt # accelerometer measurement sampling period in s int32 magnetometer_timestamp_relative # timestamp + magnetometer_timestamp_relative = Magnetometer timestamp float32[3] magnetometer_ga # Magnetic field in NED body frame, in Gauss int32 baro_timestamp_relative # timestamp + baro_timestamp_relative = Barometer timestamp float32 baro_alt_meter # Altitude, already temp. comp. float32 baro_temp_celcius # Temperature in degrees celsius所以引用时,我们可以通过
raw.accelerometer_m_s2[0]来引用结构体raw中成员accelerometer_m_s2数组中的第2个元素。其中结构体成员
accelerometer_m_s2数组的数据类型为float32,所以需要使用(double)进行类型转换。
//赋值结构体att中的变量
//这里q是四元数,不应该赋值加速度数据,这里只是一个例子
att.q[0] = raw.accelerometer_m_s2[0];
att.q[1] = raw.accelerometer_m_s2[1];
att.q[2] = raw.accelerometer_m_s2[2];
//发布vehicle_attitude主题
orb_publish(ORB_ID(vehicle_attitude), att_pub, &att);
int orb_publish(const struct orb_metadata *meta, orb_advert_t handle, const void *data)功能:发布新数据到主题; 参数: meta:uORB元对象,可以认为是主题id,一般是通过ORB_ID(主题名)来赋值; handle:orb_advertise函数返回的句柄; data:指向待发布数据的指针; 返回值: OK表示成功;错误返回ERROR;否则则有根据的去设置errno; eg: orb_publish(ORB_ID(vehicle_attitude), att_pub_fd, &att);
}
/* 如果有更多的文件描述符,可以这样:
* if (fds[1..n].revents & POLLIN) {}
*/
}
}
PX4_INFO("exiting");
return 0;
}
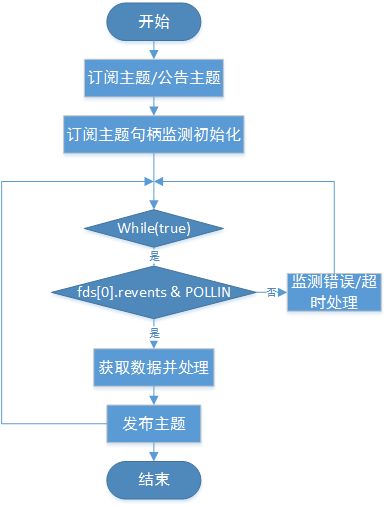
程序流程图如下:
编译px4_simple_app到飞控固件中
首先需要在cmake文件中添加px4_simple_app,位置在Firmware/cmake/configs/nuttx_px4fmu-v2_default.cmake,将examples/px4_simple_app前的注释符号#去掉即可。

保存之后退出。
打开命令行终端Terminal,使用ls、cd命令进入Firmware文件夹中。

在Firmware文件夹中输入命令即可对固件进行编译。
make px4fmu-v2_default

等待进度到100%即可完成固件编译。

将编译好的固件下载到无人机,需要输入命令。
make px4fmu-v2_default upload

这里提示需要重新插拔连接无人机的数据线。

重新插拔之后等待进度条读完即可完成烧录固件。

在QGC地面站MavlinkConsole终端运行px4_simple_app
打开QGC地面站,进入MavlinkConsole终端。

在终端中输入help命令调出所有进程,这时会发现px4_simple_app已经在列表中。

在终端中输入px4_simple_app start命令调用该进程。
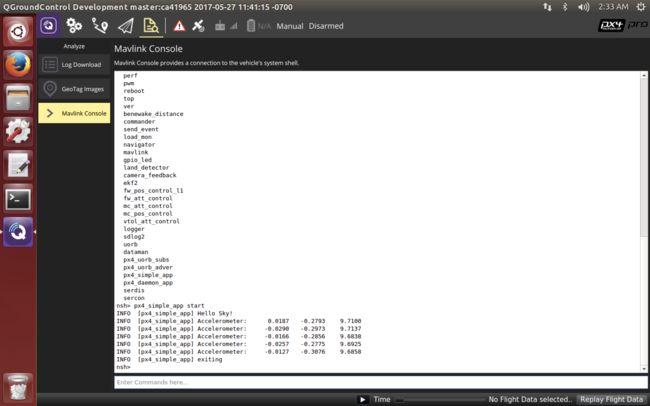
运行后会输出加速度计的数据,说明程序运行成功。
创建自己的主题
官方提供的通用接口标准主题都放在了msg文件夹下了。如果要定义我们自己的主题,比如我们新添加了超声波传感器,为了将超声波传感器的数据发布出去给其他需要的应用订阅,那么就需要创建我们的主题了。
在msg文件夹中新建mytopic.msg主题文件,输入以下代码。

在msg/CMakeLists.txt中set()函数添加mytopic.msg作为索引。

对固件进行编译。
在编译生成的build_px4fmu-v2_default文件夹中进入build_px4fmu-v2_default/src/modules/uORB/topics/mytopic.h中,系统会自动创建名为mytopic_s的结构体。

自动生成的结构体会自动包括时间戳timestamp和自动填充_padding0[]。其中自动填充会将整个消息填充到64位的整数倍,比如内容是uint64 timestamp、uint8 a,这时就会自动生成一个uint8 _padding0[7],7个8位元素的一个数组和a凑成64位。
对于订阅者来说,就可以参考上文【订阅和发布主题】了。不过还是提供下简单例程。
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
__EXPORT int Mytest_main(int argc, char *argv[]);
int Mytest_main(int argc, char *argv[])
{
struct mytopic_s orbtest;
memset(&orbtest, 0, sizeof(orbtest));
orb_advert_t pub_fd = orb_advertise(ORB_ID(mytopic), &orbtest);
orbtest.roll = 1;
orbtest.pitch = 2;
orbtest.yaw = 3;
orb_publish(ORB_ID(mytopic), pub_fd, &orbtest);
int sub_fd = orb_subscribe(ORB_ID(mytopic));
struct mytopic_s data_copy;
orb_copy(ORB_ID(mytopic), sub_fd, &data_copy);
printf("DATA:\t%4.2f\t%4.2f\t%4.2f\t%4.2f",
(double)data_copy.roll,
(double)data_copy.pitch,
(double)data_copy.yaw);
PX4_INFO("exiting");
return 0;
}
不要忘了配套的CMakeLists.txt文件。
px4_add_module(
MODULE examples__Mytest
MAIN Mytest
SRCS
Mytest.c
DEPENDS
)
参考资料:
PX4/Pixhawk—uORB深入理解和应用_别打名名的博客-CSDN博客_uorb
PX4/Pixhawk—uORB深入理解和应用(最新版)_写代码的小姜的博客-CSDN博客_pixhawk软件架构