2017年中"华为杯"E题中的路网图绘制实现
- 赛题已知条件
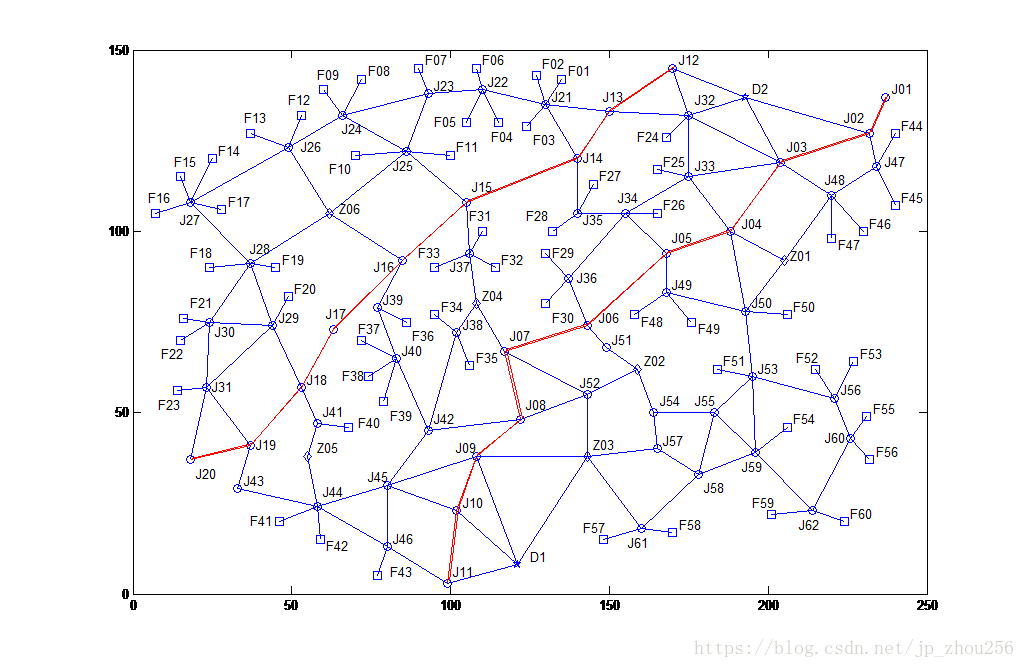
2017年"华为杯"研究生数学建模E题:多波次导弹发射中的规划问题。赛题说明:某部参与作战行动的车载发射装置共有24台,依据发射装置的不同大致分为A、B、C三类,其中A、B、C三类发射装置的数量分别为6台、6台、12台,执行任务前平均部署在2个待机地域(D1,D2)。所属作战区域内有6个转载地域(Z01~ Z06)、60个发射点位(F01~ F60),每一发射点位只能容纳1台发射装置。各转载地域最多容纳2台发射装置,但不能同时作业,单台转载作业需时10分钟。各转载地域弹种类型和数量满足需求。作战区域道路示意图如下图所示。
- 本文实现思路
本博文尝试将此图用程序画出来以备后续自适应的添加规划路径。思路:手动计算图上62+2+60+6=130个节点的邻接矩阵,使邻接的两点之间权值用距离表示,不连通的边用inf表示。计算出来邻接矩阵,同时又已知路网各个节点的位置坐标即可实现上述路网图的绘制。
- 已知的位置坐标
%62个道路节点坐标
J=[237,137;232,127;204,119;188,100;168,94;143,74;117,67;122,48;108,38;102,23;99,3;170,145;150,133;140,120;105,108;85,92;63,73;53,57;37,41;18,37;130,135;110,139;93,138;66,132;86,122;49,123;18,108;37,91;44,74;24,75;23,57;175,132;175,115;155,105;140,105;137,87;106,94;102,72;77,79;83,65;58,47;93,45;33,29;58,24;80,30;80,13;234,118;220,110;168,83;193,78;149,68;143,55;195,60;164,50;183,50;221,54;165,40;178,33;196,39;226,43;160,18;214,23]
Z=[205,92;159,62;143,38;108,80;55,38;62,105]%6个转载区域位置坐标
D=[121,8;193,137]%2个待机区域位置坐标
%60个目标发射点
F=[135,142;127,143;124,129;115,130;105,130;108,145;90,145;72,142;60,139;70,121;100,121;53,132;37,127;25,120;15,115;7,105;28,106;24,90;45,90;49,82;16,76;15,70;14,56;168,126;165,117;165,105;145,113;132,100;130,94;130,80;110,100;114,90;95,90;95,77;106,63;86,75;72,70;74,60;79,53;68,46;46,20;59,15;77,5;240,127;240,107;230,100;220,98;158,77;176,75;206,77;184,62;215,62;227,64;206,46;231,49;232,37;148,15;170,17;201,22;224,20]
- 邻接矩阵的计算及表示
%62个道路节点坐标
J=[237,137;232,127;204,119;188,100;168,94;143,74;117,67;122,48;108,38;102,23;99,3;170,145;150,133;140,120;105,108;85,92;63,73;53,57;37,41;18,37;130,135;110,139;93,138;66,132;86,122;49,123;18,108;37,91;44,74;24,75;23,57;175,132;175,115;155,105;140,105;137,87;106,94;102,72;77,79;83,65;58,47;93,45;33,29;58,24;80,30;80,13;234,118;220,110;168,83;193,78;149,68;143,55;195,60;164,50;183,50;221,54;165,40;178,33;196,39;226,43;160,18;214,23]
Z=[205,92;159,62;143,38;108,80;55,38;62,105]%6个转载区域位置坐标
D=[121,8;193,137]%2个待机区域位置坐标
%60个目标发射点
F=[135,142;127,143;124,129;115,130;105,130;108,145;90,145;72,142;60,139;70,121;100,121;53,132;37,127;25,120;15,115;7,105;28,106;24,90;45,90;49,82;16,76;15,70;14,56;168,126;165,117;165,105;145,113;132,100;130,94;130,80;110,100;114,90;95,90;95,77;106,63;86,75;72,70;74,60;79,53;68,46;46,20;59,15;77,5;240,127;240,107;230,100;220,98;158,77;176,75;206,77;184,62;215,62;227,64;206,46;231,49;232,37;148,15;170,17;201,22;224,20]
length=zeros(130);
data1=[D;Z;J;F];
save('data1.mat','data1');
%计算坐标点之间的距离矩阵
for i=1:130
for j=1:130
length(i,j)=sqrt((data1(i,1)-data1(j,1))^2+(data1(i,2)-data1(j,2))^2);
end
end
% 将存在的道路赋值到最后的赋权图路径矩阵汇总
length_last=zeros(130)+inf; %初始化
%-------------D1,D2的可行路线----------------------------
%% 邻接矩阵:行标i<列表j.只管比当前点行标大的列标的连通性即可.
% D1,D2,Z1,Z2,Z3,……,Z6,J1,J2,……,J70,F71,F72,F130.
% 与D1联通的是Z03,3+2=5;J09,9+8=17.
%% length是距离矩阵,length(1,[5,17,18,19])选择与D1联通的点(即行标是1,
%% 只管列标大于1的列且有联通的列号来作为索引选择距离矩阵中的元素)
%% 建议写下面的这个length_last距离矩阵,边写索引(1,[5,17,18,19]),
%% 边擦出原图上的i代表的那个点
length_last(1,[5,17,18,19])=length(1,[5,17,18,19]);
length_last(2,[10,11,20,40])=length(2,[10,11,20,40]);
%----------------z1-z6的可行路线------------------------------
length_last(3,[12,56,58])=length(3,[12,56,58]);
length_last(4,[59,60,62])=length(4,[59,60,62]);
length_last(5,[1,17,60,65,69])=length(5,[1,17,60,65,69]);
length_last(6,[15,45,46])=length(6,[15,45,46]);
length_last(7,[49,52])=length(7,[49,52]);
length_last(8,[24,33,34,36])=length(8,[24,33,34,36]);
%---------------J1-J60的可行路线--------------------------------
length_last(9,10)=length(9,10);
length_last(10,[2,9,11,55])=length(10,[2,9,11,55]);
length_last(11,[2,10,12,40,41,56])=length(11,[2,10,12,40,41,56]);
length_last(12,[11,13,41,58,3])=length(12,[11,13,41,58,3]);
length_last(13,[12,14,42,57])=length(13,[12,14,42,57]);
length_last(14,[13,15,44,59])=length(14,[13,15,44,59]);
length_last(15,[14,16,6,60])=length(15,[14,16,6,60]);
length_last(16,[15,17,50,60])=length(16,[15,17,50,60]);
length_last(17,[16,18,53,1,5])=length(17,[16,18,53,1,5]);
length_last(18,[17,19,53])=length(18,[17,19,53]);
length_last(19,[18,1,54])=length(19,[18,1,54]);
length_last(20,[21,40,2])=length(20,[21,40,2]);
length_last(21,[20,22,40,29])=length(21,[20,22,40,29]);
length_last(22,[21,23,29,43])=length(22,[21,23,29,43]);
length_last(23,[22,24,33,45])=length(23,[22,24,33,45]);
length_last(24,[23,25,8,47])=length(24,[23,25,8,47]);
length_last(25,[24,26])=length(25,[24,26]);
length_last(26,[25,27,37,49])=length(26,[25,27,37,49]);
length_last(27,[26,28,39,51])=length(27,[26,28,39,51]);
length_last(28,[27,39])=length(28,[27,39]);
length_last(29,[21,30,71,72,73])=length(29,[21,30,71,72,73]);
length_last(30,[29,31,74,75,76])=length(30,[29,31,74,75,76]);
length_last(31,[30,32,77])=length(31,[30,32,77]);
length_last(32,[31,33,34,78,79])=length(32,[31,33,34,78,79]);
length_last(33,[32,31,23,8,80,81])=length(33,[32,31,23,8,80,81]);
length_last(34,[8,32,35,82,83])=length(34,[8,32,35,82,83]);
length_last(35,[34,36,84,85,86,87])=length(35,[34,36,84,85,86,87]);
length_last(36,[88,89,37,38,8,33])=length(36,[88,89,37,38,8,33]);
length_last(37,[36,38,26,39,90])=length(37,[36,38,26,39,90]);
length_last(38,[36,37,39,91,92])=length(38,[36,37,39,91,92]);
length_last(39,[37,38,27,28,93])=length(39,[37,38,27,28,93]);
length_last(40,[20,4,40,41,11,94])=length(40,[20,4,40,41,11,94]);
length_last(41,[11,12,40,42,95])=length(41,[11,12,40,42,95]);
length_last(42,[41,43,13,44,96])=length(42,[41,13,43,44,96]);
length_last(43,[22,42,97,98])=length(43,[22,42,97,98]);
length_last(44,[14,42,99,100])=length(44,[14,42,99,100]);
length_last(45,[23,6,101,102,103])=length(45,[23,6,101,102,103]);
length_last(46,[6,50,104,105])=length(46,[6,50,104,105]);
length_last(47,[24,48,106])=length(47,[24,48,106]);
length_last(48,[47,50,107,108,109])=length(48,[47,50,107,108,109]);
length_last(49,[7,26,110])=length(49,[7,26,110]);
length_last(50,[46,48,16,45])=length(50,[46,48,16,45]);
length_last(51,[27,52])=length(51,[27,52]);
length_last(52,[7,53,51,111,112])=length(52,[7,53,51,111,112]);
length_last(53,[17,18,50,52,54])=length(53,[17,18,50,52,54]);
length_last(54,[19,52,53,113])=length(54,[19,52,53,113]);
length_last(55,[10,56,114,115])=length(55,[10,56,114,115]);
length_last(56,[3,55,11,117,116])=length(56,[3,55,11,117,116]);
length_last(57,[13,58,118,119])=length(57,[13,58,118,119]);
length_last(58,[3,12,57,61,120])=length(58,[3,12,57,61,120]);
length_last(59,[4,14])=length(59,[4,14]);
length_last(60,[4,15,16,5])=length(60,[4,15,16,5]);
length_last(61,[58,63,67,54,121])=length(61,[58,63,67,54,121]);
length_last(62,[4,63,65])=length(62,[4,63,65]);
length_last(63,[61,67,66,62])=length(63,[61,67,66,62]);
length_last(64,[68,122,123])=length(64,[68,122,123]);
length_last(65,[62,66,5])=length(65,[62,66,5]);
length_last(66,[67,63,65,69])=length(66,[67,63,65,69]);
length_last(67,[61,63,66,70,124])=length(67,[61,63,66,70,124]);
length_last(68,[70,64,125,126])=length(68,[70,64,125,126]);
length_last(69,[5,66,127,128])=length(69,[5,66,127,128]);
length_last(70,[67,68,129,130])=length(70,[67,68,129,130]);
for i=1:130
length_last(i,i)=0;
end
save('length_last.mat','length_last');
- 绘制作战区域道路示意图
%62个道路节点坐标
J=[237,137;232,127;204,119;188,100;168,94;143,74;117,67;122,48;108,38;102,23;99,3;170,145;150,133;140,120;105,108;85,92;63,73;53,57;37,41;18,37;130,135;110,139;93,138;66,132;86,122;49,123;18,108;37,91;44,74;24,75;23,57;175,132;175,115;155,105;140,105;137,87;106,94;102,72;77,79;83,65;58,47;93,45;33,29;58,24;80,30;80,13;234,118;220,110;168,83;193,78;149,68;143,55;195,60;164,50;183,50;221,54;165,40;178,33;196,39;226,43;160,18;214,23]
Z=[205,92;159,62;143,38;108,80;55,38;62,105]%6个转载区域位置坐标
D=[121,8;193,137]%2个待机区域位置坐标
%60个目标发射点
F=[135,142;127,143;124,129;115,130;105,130;108,145;90,145;72,142;60,139;70,121;100,121;53,132;37,127;25,120;15,115;7,105;28,106;24,90;45,90;49,82;16,76;15,70;14,56;168,126;165,117;165,105;145,113;132,100;130,94;130,80;110,100;114,90;95,90;95,77;106,63;86,75;72,70;74,60;79,53;68,46;46,20;59,15;77,5;240,127;240,107;230,100;220,98;158,77;176,75;206,77;184,62;215,62;227,64;206,46;231,49;232,37;148,15;170,17;201,22;224,20]
%整个路网图的邻接矩阵
load length_last.mat
xd=D(:,1);yd=D(:,2);xj=J(:,1);yj=J(:,2);
xz=Z(:,1);yz=Z(:,2);xf=F(:,1);yf=F(:,2);
%======================用不同的符号标出各个不同的点=========================
%--------------------------待机区域D----------------------------------------
plot(xd,yd,'rp','linewidth',2,'MarkerSize',16, 'MarkerFaceColor','r');
for i=1:2
str3='D'; str4=num2str(i);
dot=[str3,str4];
text(xd(i)+2,yd(i)+2,dot);
end
legend('待机地域','道路节点','转载地域','目标发射点','location','northwest');
hold on
%-----------------------------道路节点J------------------------------------
plot(xj,yj,'bo');
for i=1:62
str3='J'; str4=num2str(i);
dot=[str3,str4];
text(xj(i)+2,yj(i)+2,dot);
end
hold on
plot(xz,yz,'go','markersize',7, 'MarkerEdgeColor','g', 'MarkerFaceColor','g')
%------------------------转载地域---------------------------------------
for i=1:6
str3='Z'; str4=num2str(i);
dot=[str3,str4];
text(xz(i)+2,yz(i)+2,dot);
end
hold on
plot(xf,yf,'ks')
%---------------------目标发射点------------------------------------
for i=1:60
str3='F'; str4=num2str(i);
dot=[str3,str4];
text(xf(i)+2,yf(i)+2,dot);
end
hold on
legend('待机地域','道路节点','转载地域','目标发射点','location','northwest');
axis([0,250,0,150])
%==========================================================================
length_p=triu(length_last); % 取上三角矩阵矩阵
%非零和非inf的连点键直达的权重:find返回的是坐标
[x,y]=find(length_p~=inf&length_p~=0); %得到所有可行路径的序号
%拼接横纵坐标为171x2的矩阵
liebiao=[x,y]; %将需要放进一个列表中去
%% 注意位置坐标的分段
%1-2为D,3-8为Z,9-70共62个为J,71-130共60个为F。
liebiaoj=liebiao(find(liebiao(:,2)>=9&liebiao(:,2)<=70),:); %提取出J所对应的列表
%% 矩阵的行列的顺序重排
liebiaoj(:,[2,1])=liebiaoj(:,[1,2]);
liebiaoj(:,1)=liebiaoj(:,1)-8; %得到J的标号
%------------处理J和Z之间的可连接的坐标------------------------------------
for i=1:length(liebiaoj)
if liebiaoj(i,2)>=3&&liebiaoj(i,2)<=8
liebiaoj(i,2)=liebiaoj(i,2)-2; %liebiaoj(i,2)放的是列号,是的列号下标从1开始
liebiaojz(i,:)=liebiaoj(i,:);
elseif liebiaoj(i,2)<=2
liebiaojd(i,:)=liebiaoj(i,:); %列号小于2说明是D的列号
elseif liebiaoj(i,2)>=9&&liebiaoj(i,2)<=70
liebiaoj(i,2)=liebiaoj(i,2)-8; %使J的列下标从1开始
liebiaojj(i,:)=liebiaoj(i,:)
end
end
liebiaojz(all(liebiaojz == 0, 2),:)=[];
Xjz=xj(liebiaojz(:,1),:);
Yjz=yj(liebiaojz(:,1),:);
Xz=xz(liebiaojz(:,2),:);
Yz=yz(liebiaojz(:,2),:);
for i=1:length(Xjz)
plot([ Xjz(i),Xz(i)],[Yjz(i),Yz(i)],'k-');
hold on
end
%-----------------处理J和d之间的可连接坐标----------------------------------
liebiaojd(all(liebiaojd== 0, 2),:)=[];
Xjd=xj(liebiaojd(:,1),:);
Yjd=yj(liebiaojd(:,1),:);
Xd=xd(liebiaojd(:,2),:);
Yd=yd(liebiaojd(:,2),:);
for i=1:length(Xjd)
plot([ Xjd(i),Xd(i)],[Yjd(i),Yd(i)],'k-');
hold on
end
%----------------处理J和J之间的连接坐标-----------------------------------
liebiaojj(all(liebiaojj == 0, 2),:)=[];
for i=1:length(liebiaojj)
a=liebiaojj(i,1)
b=liebiaojj(i,2) %列表jj中,第一列为J排序的坐标,第二列为非排序的
if a>=1&&a<=11 %主干道1数据处理
xzj(i)=xj(a);
yzj(i)=yj(a);
Xzj(i)=xj(b);
Yzj(i)=yj(b);
elseif a>=13&&a<=20 %主干道2数据处理
xzj(i)=xj(a);
yzj(i)=yj(a);
Xzj(i)=xj(b);
Yzj(i)=yj(b)
else %非主干道数据处理
Xjj(i)=xj(a);
Yjj(i)=yj(a);
xjjj(i)=xj(b);
yjjj(i)=yj(b);
end
end
for i=1:length(Xjj) %画出非主干道
plot([ Xjj(i),xjjj(i)],[Yjj(i),yjjj(i)],'k-');
hold on
end
for i=1:length(xzj) %主干道处理
plot([xzj(i), Xzj(i)],[yzj(i),Yzj(i)],'b-','linewidth',2);
hold on
end
%------------处理J和f之间的可连接坐标---------------------------------------
liebiaof=liebiao(find(liebiao(:,2)>=71),:); %找到列大于71的行对应的坐标
liebiaof(:,1)=liebiaof(:,1)-8;
for i=1:length(liebiaof)
if liebiaof(i,2)>=71
liebiaof(i,2)=liebiaof(i,2)-70;
liebiaofj(i,:)=liebiaof(i,:);
end
end
Xfj=xf(liebiaofj(:,2),:);
Yfj=yf(liebiaofj(:,2),:);
Xj=xj(liebiaofj(:,1),:);
Yj=yj(liebiaofj(:,1),:);
for i=1:length(Xfj)
plot([ Xfj(i),Xj(i)],[Yfj(i),Yj(i)],'k-');
hold on
end
- 效果展示
