【无人机】基于Matlab实现无人机轨迹规划目标跟踪附论文报告和代码
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
个人主页:Matlab科研工作室
个人信条:格物致知。
更多Matlab仿真内容点击
智能优化算法 神经网络预测 雷达通信 无线传感器
信号处理 图像处理 路径规划 元胞自动机 无人机
⛄ 内容介绍
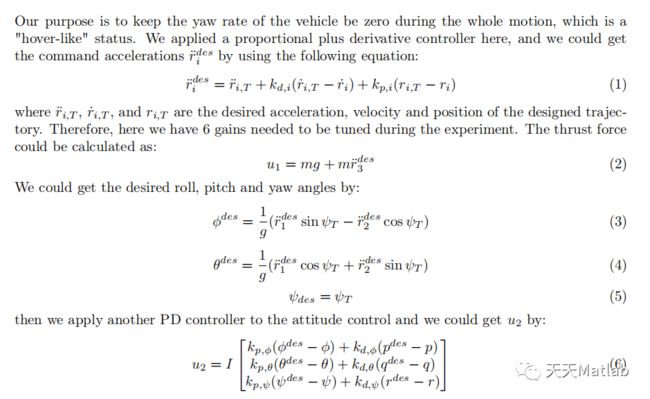
This project is intended to control the motion of the Unmanned Aerial Vehicle in the real world to follow a specifific trajectory smoothly and quickly. In this report, we will discuss how we design the controller and trajectory generator to reach this purpose.
In the last seven years, advances in materials, electronics, sensors and batteries have fueled a growth in the development of Micro Unmanned Aerial Vehicles (MAVs) that are between 0.1-0.5 m in length and 0.1-0.5 kg in mass [1]. A few groups have built and analyzed MAVs in the 10 cm range [2, 3]. One of the smallest is the Picoflflyer with a 60 mm propeller diameter and a mass of 3.3 g [4]. Platforms in the 50 cm range are more prevalent with several groups having built and flflown systems of this size [5–7]. In fact, there are several commercially available RC helicopters and research grade helicopters in this size range [8]. A review of the challenges in develop autonomous micro UAVs is presented in [9]. In this project, we introduce the modeling of quad rotors used in the GRASP Multiple MAV testbed to support research on coordinated, dynamic flflight of MAVs. This document is derived from the complete reference [10] which describes the approach to modeling, control and integrating off-the-shelf quad rotors.In the last seven years, advances in materials, electronics, sensors and batteries have fueled a growth in the development of Micro Unmanned Aerial Vehicles (MAVs) that are between 0.1-0.5 m in length and 0.1-0.5 kg in mass [1]. A few groups have built and analyzed MAVs in the 10 cm range [2, 3]. One of the smallest is the Picoflflyer with a 60 mm propeller diameter and a mass of 3.3 g [4]. Platforms in the 50 cm range are more prevalent with several groups having built and flflown systems of this size [5–7]. In fact, there are several commercially available RC helicopters and research grade helicopters in this size range [8]. A review of the challenges in develop autonomous micro UAVs is presented in [9]. In this project, we introduce the modeling of quad rotors used in the GRASP Multiple MAV testbed to support research on coordinated, dynamic flflight of MAVs. This document is derived from the complete reference [10] which describes the approach to modeling, control and integrating off-the-shelf quad rotors.


⛄ 部分代码
close all;
clear all;
clc;
addpath(genpath('./'));
%% Plan path 1
disp('Planning ...');
map = load_map('maps/map1.txt', 0.1, 2, 0.25);
start = {[0.0 -4.9 0.2]};
stop = {[6.0 18.0-1 5.0]};
% stop = {[6.0 18.0-6 3.0]};
nquad = length(start);
for qn = 1:nquad
tic
path{qn} = dijkstra(map, start{qn}, stop{qn}, true);
toc
end
if nquad == 1
plot_path(map, path{1});
else
% you could modify your plot_path to handle cell input for multiple robots
end
%% Plan path 3
disp('Planning ...');
map = load_map('maps/map3.txt', 0.2, 0.5, 0.25);
start = {[0.0, 5, 5.0]};
stop = {[20, 5, 5]};
nquad = length(start);
for qn = 1:nquad
tic
path{qn} = dijkstra(map, start{qn}, stop{qn}, true);
toc
end
if nquad == 1
plot_path(map, path{1});
else
% you could modify your plot_path to handle cell input for multiple robots
end
%% Additional init script
init_script;
%% Run trajectory
trajectory = test_trajectory(start, stop, map, path, true); % with visualization
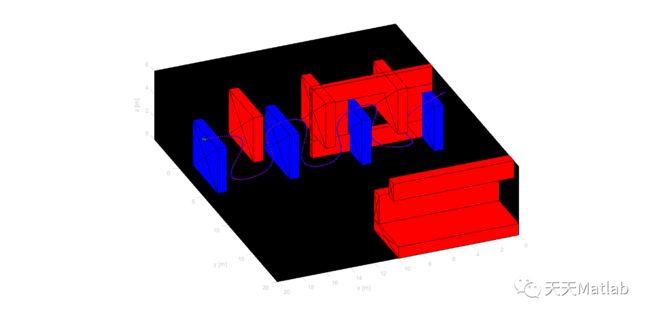
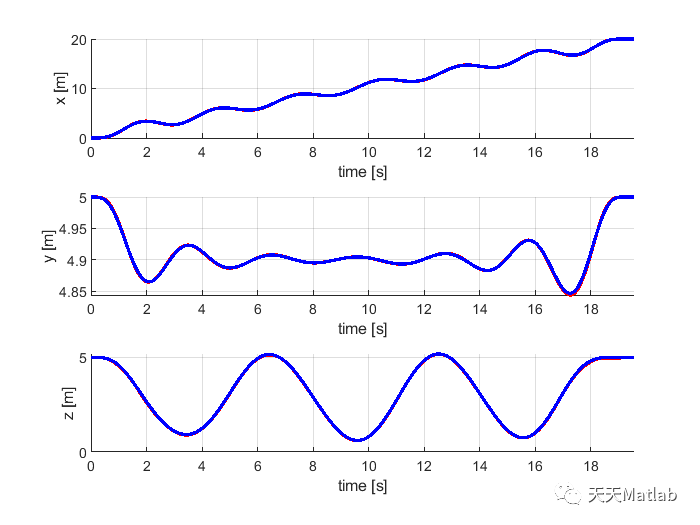
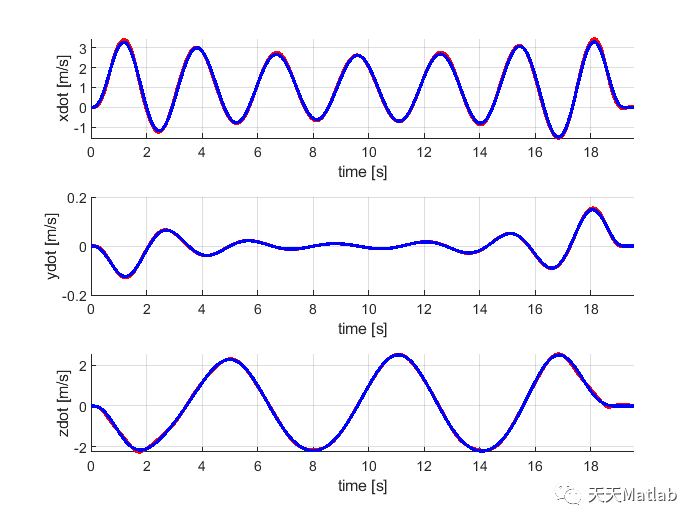
⛄ 运行结果


⛄ 参考文献
[1] D. Pines and F. Bohorquez, “Challenges facing future micro air vehicle development,” AIAA Journal of Aircraft,
vol. 43, no. 2, pp. 290–305, 2006.
[2] I. Kroo, F. Prinz, M. Shantz, P. Kunz, G. Fay, S. Cheng, T. Fabian, and C. Partridge, “The mesicopter: A
miniature rotorcraft concept, phase ii interim report,” 2000.
[3] B. Hein and I. Chopra, “Hover performance of a micro air vehicle: Rotor at low reynolds number,” Journal of
the American Helicopter Society, vol. 52, no. 3, pp. 254–262, July 2007.
[4] “Proxflflyer,” http://www.proxflflyer.com.
[5] D. Gurdan, J. Stumpf, M. Achtelik, K. Doth, G. Hirzinger, and D. Rus, “Energy-effificient autonomous four
rotor flflying robot controlled at 1 khz,” in Proc. of the IEEE Int. Conf. on Robotics and Automation, Roma, Italy,
Apr. 2007.
❤️ 关注我领取海量matlab电子书和数学建模资料
❤️部分理论引用网络文献,若有侵权联系博主删除