ARM裸机篇(三)——i.MX6ULL第一个裸机程序
linux系列目录:
linux基础篇(一)——GCC和Makefile编译过程
linux基础篇(二)——静态和动态链接
ARM裸机篇(一)——i.MX6ULL介绍
ARM裸机篇(二)——i.MX6ULL启动过程
ARM裸机篇(三)——i.MX6ULL第一个裸机程序
ARM裸机篇(四)——重定位和地址无关码
ARM裸机篇(五)——异常和中断
linux系统移植篇(一)—— linux系统组成
linux系统移植篇(二)—— Uboot使用介绍
linux系统移植篇(三)—— Linux 内核使用介绍
linux系统移植篇(四)—— 根文件系统使用介绍
linux驱动开发篇(一)—— Linux 内核模块介绍
linux驱动开发篇(二)—— 字符设备驱动框架
linux驱动开发篇(三)—— 总线设备驱动模型
linux驱动开发篇(四)—— platform平台设备驱动
文章目录
- 一、汇编基础
- 二、点亮LED灯
一、汇编基础
- 处理器内部数据传输指令

- 存储器访问指令

- 压栈和出栈指令

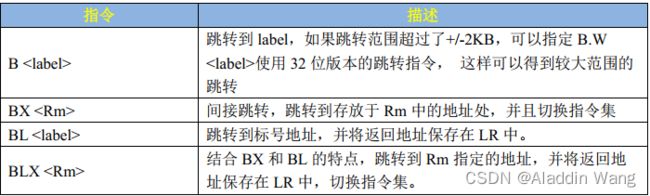
- 跳转指令
- 算术运算指令

- 逻辑运算指令

二、点亮LED灯
实际开发过程中汇编用的很少,只有在C语言环境没有准备好的情况下,才必须使用汇编,比如初始化 DDR、设置堆栈指针 SP 等。
I.MX6U 内部的 Boot ROM 会读取 DCD 数据中的 DDR 配置参数然后完成 DDR 初始化的,所以我们编写的汇编就可以省了这一部分,只需要设置好栈指针就可以使用C语言了。
编写代码之前,先搞清楚以下几个要点:
- C函数为何要用栈
总的来说,栈的作用就是:保存现场/上下文,传递参数。
-
保存现场/上下文
现场,相当于案发现场,总有一些现场的情况,要记录下来的,否则被别人破坏掉之后,你就无法恢复现场了。而此处说的现场,就是指CPU运行的时候,用到的一些寄存器,比如R0~R3,LR等等,对于这些寄存器的值,如果你不保存而直接跳转到函数中去执行,那么很可能会被破坏了,因为函数执行需要用到这些寄存器。
因此在函数调用之前,应该将这些寄存器等现场,暂时保持起来,等调用函数执行完毕返回后,再恢复现场,这样CPU就可以正确的继续执行了。 -
传递参数
当函数被调用并且参数大于4个时,(不包括第4个参数)第4个参数后面的参数就保存在栈中。
- 汇编如何调用C函数
- 当参数小于等下4个时,使用寄存器R0~R3来进行参数传递
- 当参数大于4个时,前四个参数按照上面方法传递,剩余参数传送到栈中,入栈的顺序与参数顺序相反,即最后一个参数先入栈
- C程序如何返回结果给汇编程序
- 结果为一个32位的整数时,通过寄存器R0返回
- 结果为一个64位整数时,通过R0和R1返回,依此类推.
- 结果为一个浮点数时,通过浮点运算部件的寄存器f0,d0或s0返回
- 结果为一个复合的浮点数时,通过寄存器f0-fN或者d0~dN返回
- 对于位数更多的结果,通过调用内存来传递
编写汇编部分:
.text //代码段
.align 2 //设置字节对齐
.global _start //定义全局变量
_start: //程序的开始
b reset //跳转到reset标号处
reset:
mrc p15, 0, r0, c1, c0, 0 /*读取CP15系统控制寄存器 */
bic r0, r0, #(0x1 << 12) /* 清除第12位(I位)禁用 I Cache */
bic r0, r0, #(0x1 << 2) /* 清除第 2位(C位)禁用 D Cache */
bic r0, r0, #0x2 /* 清除第 1位(A位)禁止严格对齐 */
bic r0, r0, #(0x1 << 11) /* 清除第11位(Z位)分支预测 */
bic r0, r0, #0x1 /* 清除第 0位(M位)禁用 MMU */
mcr p15, 0, r0, c1, c0, 0 /* 将修改后的值写回CP15寄存器 */
ldr sp, =0x80200000 //栈指针暂时设置到这个位置
b main //跳转到main函数执行
/*进入死循环*/
loop:
b loop
编写C语言部分:
#define CCM_CCGR1 (volatile unsigned long*)0x20C406C //时钟控制寄存器
#define IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO04 (volatile unsigned long*)0x20E006C//GPIO1_04复用功能选择寄存器
#define IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO04 (volatile unsigned long*)0x20E02F8 //PAD属性设置寄存器
#define GPIO1_GDIR (volatile unsigned long*)0x0209C004 //GPIO方向设置寄存器(输入或输出)
#define GPIO1_DR (volatile unsigned long*)0x0209C000 //GPIO输出状态寄存器
#define uint32_t unsigned int
/*简单延时函数*/
void delay()
{
static uint32_t delay_time = 0x1FFFF;
do{
delay_time --;
}
while(delay_time);
delay_time = 0x1FFFF;
}
int main()
{
*(CCM_CCGR1) = 0xFFFFFFFF; //开启GPIO1的时钟
*(IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO04) = 0x5;//设置PAD复用功能为GPIO
*(IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO04) = 0x1F838;//设置PAD属性
*(GPIO1_GDIR) = 0x10;//设置GPIO为输出模式
*(GPIO1_DR) = 0x0; //设置输出电平为低电平
while(1)
{
*(GPIO1_DR) = 0x0;
delay();
*(GPIO1_DR) = 1<<4;
delay();
}
return 0;
}
编写链接脚本:
链接脚本主要目的是描述输入文件中的段如何被映射到输出文件中,并且控制输出文件中的内存排布。
gcc的链接脚本后缀一般为lds,编写led.lds文件:
ENTRY(_start)
SECTIONS {
. = 0X87800000;
. = ALIGN(4);
.text :
{
start.o (.text)
*(.text)
}
. = ALIGN(4);
.rodata : { *(.rodata) }
. = ALIGN(4);
.data : { *(.data) }
. = ALIGN(4);
__bss_start = .;
.bss : { *(.bss) *(.COMMON) }
__bss_end = .;
}
结合代码各部分讲解如下:
-
第1行,ENTRY(_start) 用于指定程序的入口,ENTRY( )是设置入口地址的命令, “_start”是程序的入口,本章的led程序的入口地址位于start.S的“_start”标号处。
-
第2行,定义SECTIONS。SECTIONS可以理解为是一块区域,我们在这块区域排布我们的代码, 链接时链接器就会按照这里的指示链接我们的代码。
-
第3行,“.”运算符代表当前位置。 我们在SECTION的最开始使用“.= 0X87800000”就是将链接起始地址设置为0X87800000。
-
第5行,设置字节对齐。这里同样用到了“.”运算符,它表示从当前位置开始执行四字节对齐。 假设当前位置为0x80000001,执行该命令后当前地址将会空出三个字节转到0x80000004地址处。
-
第6行,定义代码段。“.text :”用于定义代码段,固定的语法要求,我们按照要求写即可。 在“{}”中指定那些内容放在代码段。将start.o中的代码放到代码段的最前面。start.S是启动代码应当首先被执行, 所以通常情况下要把它放到代码段的最前面,其他源文件的代码按照系统默认的排放顺序即可, 通配符“*”在这里表示其他剩余所有的.o文件。
-
第7-10行,设置数据段。同设置代码段类似,首先设置字节对齐,然后定义代码段。在代码段里使用“*”通配符, 将所有源文件中的代码添加到这个代码段中。
-
第11-13行,设置BSS段。.bss 段的起始地址和结束地址保存在了“__bss_start”和“__bss_end”中,我们就可以直接在汇编或者 C 文件里面使用这两个符号。
连接器脚本编写完成后,在链接指令中使用链接脚本替换-Ttext 0X87800000
arm-none-eabi-ld -Tled.lds $^ -o led.elf
编写makefile文件:
我们程序编写完成后需要依次输入编译、链接、格式转换 命令才能最终生成二进制文件。这种编译方式效率低、容易出错。可以使用makefile文件来干这件事。
makefile文件:
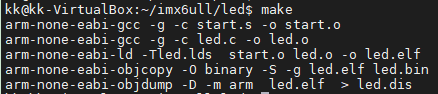
all: start.o led.o
arm-none-eabi-ld -Tled.lds $^ -o led.elf
arm-none-eabi-objcopy -O binary -S -g led.elf led.bin
arm-none-eabi-objdump -D -m arm led.elf > led.dis
%.o : %.S
arm-none-eabi-gcc -g -c $^ -o start.o
%.o : %.c
arm-none-eabi-gcc -g -c $^ -o led.o
.PHONY: clean
clean:
rm *.o *.elf *.bin
链接脚本led.lds和makefile编写完成后,就可以直接使用make命令,来一键完成编译和链接了。
然后,只需要把led.bin通过烧录工具制作成镜像文件烧录到SD卡就可以启动了。