文章目录
- model/region_proposal_network.py
-
- def_enumerate_shifted_anchor_torch:
- class RegionProposalNetwork(nn.Module):
- model/faster_rcnn_vgg16.py
-
- model/faster_rcnn.py
model/region_proposal_network.py
def_enumerate_shifted_anchor_torch:
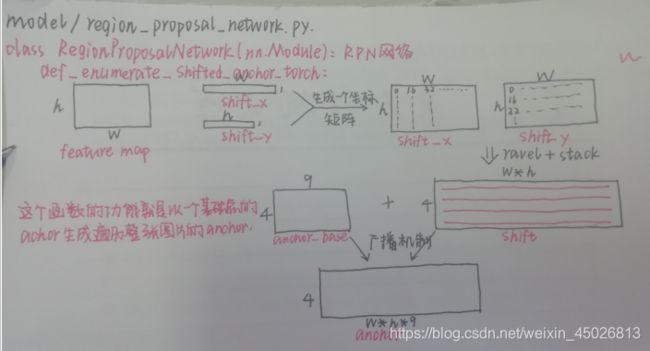
def _enumerate_shifted_anchor_torch(anchor_base, feat_stride, height, width):
import torch as t
shift_y = t.arange(0, height * feat_stride, feat_stride)
shift_x = t.arange(0, width * feat_stride, feat_stride)
shift_x, shift_y = xp.meshgrid(shift_x, shift_y)
shift = xp.stack((shift_y.ravel(), shift_x.ravel(),
shift_y.ravel(), shift_x.ravel()), axis=1)
A = anchor_base.shape[0]
K = shift.shape[0]
anchor = anchor_base.reshape((1, A, 4)) + \
shift.reshape((1, K, 4)).transpose((1, 0, 2))
anchor = anchor.reshape((K * A, 4)).astype(np.float32)
return anchor
class RegionProposalNetwork(nn.Module):
class RegionProposalNetwork(nn.Module):
"""Region Proposal Network introduced in Faster R-CNN.RPN引入Faster R-CNN
This is Region Proposal Network introduced in Faster R-CNN [#]_.
This takes features extracted from images and propose
class agnostic bounding boxes around "objects".
.. [#] Shaoqing Ren, Kaiming He, Ross Girshick, Jian Sun. \
Faster R-CNN: Towards Real-Time Object Detection with \
Region Proposal Networks. NIPS 2015.
Args:
in_channels (int): The channel size of input.
mid_channels (int): The channel size of the intermediate tensor.
ratios (list of floats): This is ratios of width to height of
the anchors.
anchor_scales (list of numbers): This is areas of anchors.
Those areas will be the product of the square of an element in
:obj:`anchor_scales` and the original area of the reference
window.
feat_stride (int): Stride size after extracting features from an
image.
initialW (callable): Initial weight value. If :obj:`None` then this
function uses Gaussian distribution scaled by 0.1 to
initialize weight.
May also be a callable that takes an array and edits its values.
proposal_creator_params (dict): Key valued paramters for
:class:`model.utils.creator_tools.ProposalCreator`.
.. seealso::
:class:`~model.utils.creator_tools.ProposalCreator`
"""
def __init__(
self, in_channels=512, mid_channels=512, ratios=[0.5, 1, 2],
anchor_scales=[8, 16, 32], feat_stride=16,
proposal_creator_params=dict(),
):
super(RegionProposalNetwork, self).__init__()
self.anchor_base = generate_anchor_base(
anchor_scales=anchor_scales, ratios=ratios)
self.feat_stride = feat_stride
self.proposal_layer = ProposalCreator(self, **proposal_creator_params)
n_anchor = self.anchor_base.shape[0]
self.conv1 = nn.Conv2d(in_channels, mid_channels, 3, 1, 1)
self.score = nn.Conv2d(mid_channels, n_anchor * 2, 1, 1, 0)
self.loc = nn.Conv2d(mid_channels, n_anchor * 4, 1, 1, 0)
normal_init(self.conv1, 0, 0.01)
normal_init(self.score, 0, 0.01)
normal_init(self.loc, 0, 0.01)
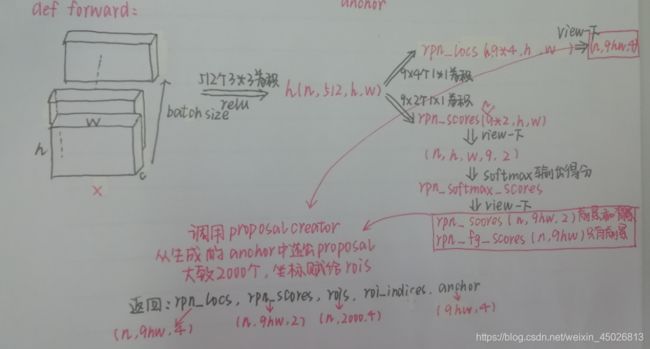
def forward(self, x, img_size, scale=1.):
"""Forward Region Proposal Network.RPN网络前向传播
Here are notations.
* :math:`N` is batch size.
* :math:`C` channel size of the input.
* :math:`H` and :math:`W` are height and witdh of the input feature.
* :math:`A` is number of anchors assigned to each pixel.
Args:
x (~torch.autograd.Variable): The Features extracted from images.
Its shape is :math:`(N, C, H, W)`.
img_size (tuple of ints): A tuple :obj:`height, width`,
which contains image size after scaling.
scale (float): The amount of scaling done to the input images after
reading them from files.对输入图像所做的缩放量
Returns:
(~torch.autograd.Variable, ~torch.autograd.Variable, array, array, array):
This is a tuple of five following values.
* **rpn_locs**: Predicted bounding box offsets and scales for \
anchors. Its shape is :math:`(N, H W A, 4)`.
* **rpn_scores**: Predicted foreground scores for \
anchors. Its shape is :math:`(N, H W A, 2)`.
* **rois**: A bounding box array containing coordinates of \
proposal boxes. This is a concatenation of bounding box \
arrays from multiple images in the batch. \
Its shape is :math:`(R', 4)`. Given :math:`R_i` predicted \
bounding boxes from the :math:`i` th image, \
:math:`R' = \\sum _{i=1} ^ N R_i`.
* **roi_indices**: An array containing indices of images to \
which RoIs correspond to. Its shape is :math:`(R',)`.
* **anchor**: Coordinates of enumerated shifted anchors. \
Its shape is :math:`(H W A, 4)`.
"""
n, _, hh, ww = x.shape
anchor = _enumerate_shifted_anchor(
np.array(self.anchor_base),
self.feat_stride, hh, ww)
n_anchor = anchor.shape[0] // (hh * ww)
h = F.relu(self.conv1(x))
rpn_locs = self.loc(h)
rpn_locs = rpn_locs.permute(0, 2, 3, 1).contiguous().view(n, -1, 4)
rpn_scores = self.score(h)
rpn_scores = rpn_scores.permute(0, 2, 3, 1).contiguous()
rpn_softmax_scores = F.softmax(rpn_scores.view(n, hh, ww, n_anchor, 2), dim=4)
rpn_fg_scores = rpn_softmax_scores[:, :, :, :, 1].contiguous()
rpn_fg_scores = rpn_fg_scores.view(n, -1)
rpn_scores = rpn_scores.view(n, -1, 2)
rois = list()
roi_indices = list()
for i in range(n):
roi = self.proposal_layer(
rpn_locs[i].cpu().data.numpy(),
rpn_fg_scores[i].cpu().data.numpy(),
anchor, img_size,
scale=scale)
batch_index = i * np.ones((len(roi),), dtype=np.int32)
rois.append(roi)
roi_indices.append(batch_index)
rois = np.concatenate(rois, axis=0)
roi_indices = np.concatenate(roi_indices, axis=0)
return rpn_locs, rpn_scores, rois, roi_indices, anchor
model/faster_rcnn_vgg16.py
class VGG16ROIHead:
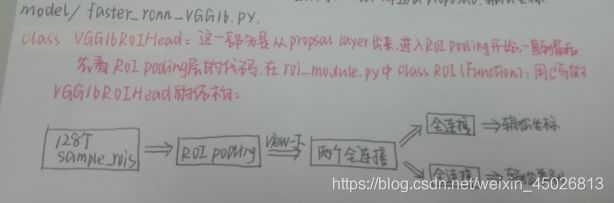
class VGG16RoIHead(nn.Module):
"""Faster R-CNN Head for VGG-16 based implementation.
This class is used as a head for Faster R-CNN.
This outputs class-wise localizations and classification based on feature
maps in the given RoIs.
Args:
n_class (int): The number of classes possibly including the background.
roi_size (int): Height and width of the feature maps after RoI-pooling.
spatial_scale (float): Scale of the roi is resized.
classifier (nn.Module): Two layer Linear ported from vgg16
"""
def __init__(self, n_class, roi_size, spatial_scale,
classifier):
super(VGG16RoIHead, self).__init__()
self.classifier = classifier
self.cls_loc = nn.Linear(4096, n_class * 4)
self.score = nn.Linear(4096, n_class)
normal_init(self.cls_loc, 0, 0.001)
normal_init(self.score, 0, 0.01)
self.n_class = n_class
self.roi_size = roi_size
self.spatial_scale = spatial_scale
self.roi = RoIPooling2D(self.roi_size, self.roi_size, self.spatial_scale)
def forward(self, x, rois, roi_indices):
"""Forward the chain.
We assume that there are :math:`N` batches.
Args:
x (Variable): 4D image variable.
rois (Tensor): A bounding box array containing coordinates of
proposal boxes. This is a concatenation of bounding box
arrays from multiple images in the batch.
Its shape is :math:`(R', 4)`. Given :math:`R_i` proposed
RoIs from the :math:`i` th image,
:math:`R' = \\sum _{i=1} ^ N R_i`.
roi_indices (Tensor): An array containing indices of images to
which bounding boxes correspond to. Its shape is :math:`(R',)`.
"""
roi_indices = at.totensor(roi_indices).float()
rois = at.totensor(rois).float()
indices_and_rois = t.cat([roi_indices[:, None], rois], dim=1)
xy_indices_and_rois = indices_and_rois[:, [0, 2, 1, 4, 3]]
indices_and_rois = xy_indices_and_rois.contiguous()
pool = self.roi(x, indices_and_rois)
pool = pool.view(pool.size(0), -1)
fc7 = self.classifier(pool)
roi_cls_locs = self.cls_loc(fc7)
roi_scores = self.score(fc7)
return roi_cls_locs, roi_scores
class RoI(Function):
def __init__(self, outh, outw, spatial_scale):
self.forward_fn = load_kernel('roi_forward', kernel_forward)
self.backward_fn = load_kernel('roi_backward', kernel_backward)
self.outh, self.outw, self.spatial_scale = outh, outw, spatial_scale
def forward(self, x, rois):
x = x.contiguous()
rois = rois.contiguous()
self.in_size = B, C, H, W = x.size()
self.N = N = rois.size(0)
output = t.zeros(N, C, self.outh, self.outw).cuda()
self.argmax_data = t.zeros(N, C, self.outh, self.outw).int().cuda()
self.rois = rois
args = [x.data_ptr(), rois.data_ptr(),
output.data_ptr(),
self.argmax_data.data_ptr(),
self.spatial_scale, C, H, W,
self.outh, self.outw,
output.numel()]
stream = Stream(ptr=torch.cuda.current_stream().cuda_stream)
self.forward_fn(args=args,
block=(CUDA_NUM_THREADS, 1, 1),
grid=(GET_BLOCKS(output.numel()), 1, 1),
stream=stream)
return output
def backward(self, grad_output):
grad_output = grad_output.contiguous()
B, C, H, W = self.in_size
grad_input = t.zeros(self.in_size).cuda()
stream = Stream(ptr=torch.cuda.current_stream().cuda_stream)
args = [grad_output.data_ptr(),
self.argmax_data.data_ptr(),
self.rois.data_ptr(),
grad_input.data_ptr(),
self.N, self.spatial_scale, C, H, W, self.outh, self.outw,
grad_input.numel()]
self.backward_fn(args=args,
block=(CUDA_NUM_THREADS, 1, 1),
grid=(GET_BLOCKS(grad_input.numel()), 1, 1),
stream=stream
)
return grad_input, None
class RoIPooling2D(t.nn.Module):
def __init__(self, outh, outw, spatial_scale):
super(RoIPooling2D, self).__init__()
self.RoI = RoI(outh, outw, spatial_scale)
def forward(self, x, rois):
return self.RoI(x, rois)
model/faster_rcnn.py