按下电源键时,android做了啥?
当我们按下电源键时,手机开始上电,并从地址0x00000000处开始执行,而这个地址通常是Bootloader程序的首地址。
bootloader是一段裸机程序,是直接与硬件打交道的,其最终目的是“初始化并检测硬件设备,准备好软件环境,最后调用操作系统内核”。除此之外,bootloader还有保护功能,部分品牌的手机对bootloader做了加锁操作,防止boot分区和recovery分区被写入。
或许有人会问了,什么是boot分区,什么又是recovery分区?
我们先来认识一下Android系统的常见分区:
/boot
这个分区上有Android的引导程序,包括内核和内存操作程序。没有这个分区设备就不能被引导。恢复系统的时候会擦除这个分区,并且必须重新安装引导程序和ROM才能重启系统。
/recovery
recovery分区被认为是另一个启动分区,你可以启动设备进入recovery控制台去执行高级的系统恢复和管理操作。
/data
这个分区保存着用户数据。通讯录、短信、设置和你安装的apps都在这个分区上。擦除这个分区相当于恢复出厂设置,当你第一次启动设备的时候或者在安装了官方或者客户的ROM之后系统会自动重建这个分区。当你执行恢复出厂设置时,就是在擦除这个分区。
/cache
这个分区是Android系统存储频繁访问的数据和app的地方。擦除这个分区不影响你的个人数据,当你继续使用设备时,被擦除的数据就会自动被创建。
/apex
Android Q新增特性,将系统功能模块化,允许系统按模块来独立升级。此分区用于存放apex 相关的内容。
为什么需要bootloader去拉起linux内核,而不把bootloader这些功能直接内置在linux内核中呢?这个问题不在此做出回答,留给大家自行去思考。
bootloader完成初始化工作后,会载入 /boot 目录下面的 kernel,此时控制权转交给操作系统。操作系统将要完成的存储管理、设备管理、文件管理、进程管理、加载驱动等任务的初始化工作,以便进入用户态。
内核启动完成后,将会寻找init文件(init文件位于/system/bin/init),启动init进程,也就是android的第一个进程。
我们来关注一下内核的common/init/main.c中的kernel_init方法。
static int __ref kernel_init(void *unused)
{
...
if (execute_command) {
ret = run_init_process(execute_command);
if (!ret)
return 0;
}
if (CONFIG_DEFAULT_INIT[0] != '\0') {
ret = run_init_process(CONFIG_DEFAULT_INIT);
if (ret)
pr_err("Default init %s failed (error %d)\n",CONFIG_DEFAULT_INIT, ret);
else
return 0;
}
if (!try_to_run_init_process("/sbin/init") ||!try_to_run_init_process("/etc/init") ||
!try_to_run_init_process("/bin/init") ||!try_to_run_init_process("/bin/sh"))
return 0;
}
可以看到,在init_kernel的最后,会调用run_init_process方法来启动init进程。
static int run_init_process(const char *init_filename){
const char *const *p;
argv_init[0] = init_filename;
return kernel_execve(init_filename, argv_init, envp_init);
}
kernel_execve是内核空间调用用户空间的应用程序的函数。
接下来我们来重点分析init进程。
init进程解析
我们从system/core/init/main.cpp 这个文件开始看起。
int main(int argc, char** argv) {
#if __has_feature(address_sanitizer)
__asan_set_error_report_callback(AsanReportCallback);
#endif
if (!strcmp(basename(argv[0]), "ueventd")) {
return ueventd_main(argc, argv);
}
if (argc > 1) {
if (!strcmp(argv[1], "subcontext")) {
android::base::InitLogging(argv, &android::base::KernelLogger);
const BuiltinFunctionMap function_map;
return SubcontextMain(argc, argv, &function_map);
}
if (!strcmp(argv[1], "selinux_setup")) {
return SetupSelinux(argv);
}
if (!strcmp(argv[1], "second_stage")) {
return SecondStageMain(argc, argv);
}
}
return FirstStageMain(argc, argv);
}
第一个参数argc表示参数个数,第二个参数是参数列表,也就是具体的参数。
main函数有四个参数入口:
- 一是参数中有ueventd,进入ueventd_main
- 二是参数中有subcontext,进入InitLogging 和SubcontextMain
- 三是参数中有selinux_setup,进入SetupSelinux
- 四是参数中有second_stage,进入SecondStageMain
main的执行顺序如下:
- FirstStageMain 启动第一阶段
- SetupSelinux 加载selinux规则,并设置selinux日志,完成SELinux相关工作
- SecondStageMain 启动第二阶段
- ueventd_main init进程创建子进程ueventd,并将创建设备节点文件的工作托付给ueventd。
FirstStageMain
我们来从FirstStageMain的源码看起,源码位于/system/core/init/first_stage_init.cpp
int FirstStageMain(int argc, char** argv) {
boot_clock::time_point start_time = boot_clock::now();
#define CHECKCALL(x) \
if (x != 0) errors.emplace_back(#x " failed", errno);
// Clear the umask.
umask(0);
//初始化系统环境变量
CHECKCALL(clearenv());
CHECKCALL(setenv("PATH", _PATH_DEFPATH, 1));
// 挂载及创建基本的文件系统,并设置合适的访问权限
CHECKCALL(mount("tmpfs", "/dev", "tmpfs", MS_NOSUID, "mode=0755"));
CHECKCALL(mkdir("/dev/pts", 0755));
CHECKCALL(mkdir("/dev/socket", 0755));
CHECKCALL(mount("devpts", "/dev/pts", "devpts", 0, NULL));
#define MAKE_STR(x) __STRING(x)
CHECKCALL(mount("proc", "/proc", "proc", 0, "hidepid=2,gid=" MAKE_STR(AID_READPROC)));
#undef MAKE_STR
// 不要将原始命令行公开给非特权进程
CHECKCALL(chmod("/proc/cmdline", 0440));
gid_t groups[] = {AID_READPROC};
CHECKCALL(setgroups(arraysize(groups), groups));
CHECKCALL(mount("sysfs", "/sys", "sysfs", 0, NULL));
CHECKCALL(mount("selinuxfs", "/sys/fs/selinux", "selinuxfs", 0, NULL));
CHECKCALL(mknod("/dev/kmsg", S_IFCHR | 0600, makedev(1, 11)));
if constexpr (WORLD_WRITABLE_KMSG) {
CHECKCALL(mknod("/dev/kmsg_debug", S_IFCHR | 0622, makedev(1, 11)));
}
//创建linux随机伪设备文件
CHECKCALL(mknod("/dev/random", S_IFCHR | 0666, makedev(1, 8)));
CHECKCALL(mknod("/dev/urandom", S_IFCHR | 0666, makedev(1, 9)));
//log wrapper所必须的,需要在ueventd运行之前被调用
CHECKCALL(mknod("/dev/ptmx", S_IFCHR | 0666, makedev(5, 2)));
CHECKCALL(mknod("/dev/null", S_IFCHR | 0666, makedev(1, 3)));
...
//将内核的stdin/stdout/stderr 全都重定向/dev/null,关闭默认控制台输出
SetStdioToDevNull(argv);
// tmpfs已经挂载到/dev上,同时我们也挂载了/dev/kmsg,我们能够与外界开始沟通了
//初始化内核log
InitKernelLogging(argv);
//检测上面的操作是否发生了错误
if (!errors.empty()) {
for (const auto& [error_string, error_errno] : errors) {
LOG(ERROR) << error_string << " " << strerror(error_errno);
}
LOG(FATAL) << "Init encountered errors starting first stage, aborting";
}
LOG(INFO) << "init first stage started!";
auto old_root_dir = std::unique_ptr{opendir("/"), closedir};
if (!old_root_dir) {
PLOG(ERROR) << "Could not opendir("/"), not freeing ramdisk";
}
struct stat old_root_info;
...
//挂载 system、cache、data 等系统分区
if (!DoFirstStageMount()) {
LOG(FATAL) << "Failed to mount required partitions early ...";
}
...
//进入下一步,SetupSelinux
const char* path = "/system/bin/init";
const char* args[] = {path, "selinux_setup", nullptr};
execv(path, const_cast(args));
return 1;
}
我们来总结一下,FirstStageMain到底做了哪些重要的事情:
- 挂载及创建基本的文件系统,并设置合适的访问权限
- 关闭默认控制台输出,并初始化内核级log。
- 挂载 system、cache、data 等系统分区
SetupSelinux
这个模块主要的工作是设置SELinux安全策略,本章内容主要聚焦于android的启动流程,selinux的内容在此不做展开。
int SetupSelinux(char** argv) {
...
const char* path = "/system/bin/init";
const char* args[] = {path, "second_stage", nullptr};
execv(path, const_cast(args));
return 1;
}
SetupSelinux的最后,进入了init的第二阶段SecondStageMain。
SecondStageMain
不多说,先上代码。
int SecondStageMain(int argc, char** argv) {
// 禁止OOM killer 结束该进程以及它的子进程
if (auto result = WriteFile("/proc/1/oom_score_adj", "-1000"); !result) {
LOG(ERROR) << "Unable to write -1000 to /proc/1/oom_score_adj: " << result.error();
}
// 启用全局Seccomp,Seccomp是什么请自行查阅资料
GlobalSeccomp();
// 设置所有进程都能访问的会话密钥
keyctl_get_keyring_ID(KEY_SPEC_SESSION_KEYRING, 1);
// 创建 /dev/.booting 文件,就是个标记,表示booting进行中
close(open("/dev/.booting", O_WRONLY | O_CREAT | O_CLOEXEC, 0000));
//初始化属性的服务,并从指定文件读取属性
property_init();
...
// 进行SELinux第二阶段并恢复一些文件安全上下文
SelinuxSetupKernelLogging();
SelabelInitialize();
SelinuxRestoreContext();
//初始化Epoll,android这里对epoll做了一层封装
Epoll epoll;
if (auto result = epoll.Open(); !result) {
PLOG(FATAL) << result.error();
}
//epoll 中注册signalfd,主要是为了创建handler处理子进程终止信号
InstallSignalFdHandler(&epoll);
...
//epoll 中注册property_set_fd,设置其他系统属性并开启系统属性的服务
StartPropertyService(&epoll);
MountHandler mount_handler(&epoll);
...
ActionManager& am = ActionManager::GetInstance();
ServiceList& sm = ServiceList::GetInstance();
//解析init.rc等文件,建立rc文件的action 、service,启动其他进程,十分关键的一步
LoadBootScripts(am, sm);
...
am.QueueBuiltinAction(SetupCgroupsAction, "SetupCgroups");
//执行rc文件中触发器为 on early-init 的语句
am.QueueEventTrigger("early-init");
// 等冷插拔设备初始化完成
am.QueueBuiltinAction(wait_for_coldboot_done_action, "wait_for_coldboot_done");
am.QueueBuiltinAction(MixHwrngIntoLinuxRngAction, "MixHwrngIntoLinuxRng");
am.QueueBuiltinAction(SetMmapRndBitsAction, "SetMmapRndBits");
am.QueueBuiltinAction(SetKptrRestrictAction, "SetKptrRestrict");
// 设备组合键的初始化操作
Keychords keychords;
am.QueueBuiltinAction(
[&epoll, &keychords](const BuiltinArguments& args) -> Result {
for (const auto& svc : ServiceList::GetInstance()) {
keychords.Register(svc->keycodes());
}
keychords.Start(&epoll, HandleKeychord);
return Success();
},
"KeychordInit");
am.QueueBuiltinAction(console_init_action, "console_init");
// 执行rc文件中触发器为on init的语句
am.QueueEventTrigger("init");
// Starting the BoringSSL self test, for NIAP certification compliance.
am.QueueBuiltinAction(StartBoringSslSelfTest, "StartBoringSslSelfTest");
// Repeat mix_hwrng_into_linux_rng in case /dev/hw_random or /dev/random
// wasn't ready immediately after wait_for_coldboot_done
am.QueueBuiltinAction(MixHwrngIntoLinuxRngAction, "MixHwrngIntoLinuxRng");
am.QueueBuiltinAction(InitBinder, "InitBinder");
// 当设备处于充电模式时,不需要mount文件系统或者启动系统服务,充电模式下,将charger设为执行队列,否则把late-init设为执行队列
std::string bootmode = GetProperty("ro.bootmode", "");
if (bootmode == "charger") {
am.QueueEventTrigger("charger");
} else {
am.QueueEventTrigger("late-init");
}
// 基于属性当前状态 运行所有的属性触发器.
am.QueueBuiltinAction(queue_property_triggers_action, "queue_property_triggers");
while (true) {
//开始进入死循环状态
auto epoll_timeout = std::optional{};
//执行关机重启流程
if (do_shutdown && !shutting_down) {
do_shutdown = false;
if (HandlePowerctlMessage(shutdown_command)) {
shutting_down = true;
}
}
if (!(waiting_for_prop || Service::is_exec_service_running())) {
am.ExecuteOneCommand();
}
if (!(waiting_for_prop || Service::is_exec_service_running())) {
if (!shutting_down) {
auto next_process_action_time = HandleProcessActions();
// If there's a process that needs restarting, wake up in time for that.
if (next_process_action_time) {
epoll_timeout = std::chrono::ceil(
*next_process_action_time - boot_clock::now());
if (*epoll_timeout < 0ms) epoll_timeout = 0ms;
}
}
// If there's more work to do, wake up again immediately.
if (am.HasMoreCommands()) epoll_timeout = 0ms;
}
// 循环等待事件发生
if (auto result = epoll.Wait(epoll_timeout); !result) {
LOG(ERROR) << result.error();
}
}
return 0;
}
总结一下,第二阶段做了以下这些比较重要的事情:
- 初始化属性的服务,并从指定文件读取属性
- 初始化epoll,并注册signalfd和property_set_fd,建立和init的子进程以及部分服务的通讯桥梁
- 初始化设备组合键,使系统能够对组合键信号做出响应
- 解析init.rc文件,并按rc里的定义去启动服务
- 开启死循环,用于接收epoll的事件
在第二阶段,我们需要重点关注以下问题:
init进程是如何通过init.rc配置文件去启动其他的进程的呢?
init.rc 解析
我们从 LoadBootScripts(am, sm)这个方法开始看起,一步一部来挖掘init.rc 的解析流程。
static void LoadBootScripts(ActionManager& action_manager, ServiceList& service_list) {
//初始化ServiceParse、ActionParser、ImportParser三个解析器
Parser parser = CreateParser(action_manager, service_list);
std::string bootscript = GetProperty("ro.boot.init_rc", "");
if (bootscript.empty()) {
//bootscript为空,进入此分支
parser.ParseConfig("/init.rc");
if (!parser.ParseConfig("/system/etc/init")) {
late_import_paths.emplace_back("/system/etc/init");
}
if (!parser.ParseConfig("/product/etc/init")) {
late_import_paths.emplace_back("/product/etc/init");
}
if (!parser.ParseConfig("/product_services/etc/init")) {
late_import_paths.emplace_back("/product_services/etc/init");
}
if (!parser.ParseConfig("/odm/etc/init")) {
late_import_paths.emplace_back("/odm/etc/init");
}
if (!parser.ParseConfig("/vendor/etc/init")) {
late_import_paths.emplace_back("/vendor/etc/init");
}
} else {
parser.ParseConfig(bootscript);
}
}
我们可以看到这句话,Parse开始解析init.rc文件,在深入下去之前,让我们先来认识一下init.rc。
parser.ParseConfig("/init.rc")
init.rc是一个可配置的初始化文件,负责系统的初步建立。它的源文件的路径为 /system/core/rootdir/init.rc。
init.rc文件有着固定的语法,由于内容过多,限制于篇幅的原因,在此另外单独开了一篇文章进行讲解:
Android 10 启动分析之init语法
了解了init.rc的语法后,我们来看看init.rc文件里的内容。
import /init.environ.rc //导入全局环境变量
import /init.usb.rc //adb 服务、USB相关内容的定义
import /init.${ro.hardware}.rc //硬件相关的初始化,一般是厂商定制
import /vendor/etc/init/hw/init.${ro.hardware}.rc
import /init.usb.configfs.rc
import /init.${ro.zygote}.rc //定义Zygote服务
我们可以看到,在/system/core/init目录下,存在以下四个zygote相关的文件

怎样才能知道我们当前的手机用的是哪个配置文件呢?
答案是通过adb shell getprop | findstr ro.zygote命令,看看${ro.zygote}这个环境变量具体的值是什么,笔者所使用的华为手机的ro.zygote值如下所示:

什么是Zygote,Zygote的启动过程是怎样的,它的启动配置文件里又做了啥,在这里我们不再做进一步探讨, 只需要知道init在一开始在这个文件中对Zygote服务做了定义,而上述的这些问题将留到 启动分析之Zygote篇 再去说明。
on early-init
# Disable sysrq from keyboard
write /proc/sys/kernel/sysrq 0
# Set the security context of /adb_keys if present.
restorecon /adb_keys
# Set the security context of /postinstall if present.
restorecon /postinstall
mkdir /acct/uid
# memory.pressure_level used by lmkd
chown root system /dev/memcg/memory.pressure_level
chmod 0040 /dev/memcg/memory.pressure_level
# app mem cgroups, used by activity manager, lmkd and zygote
mkdir /dev/memcg/apps/ 0755 system system
# cgroup for system_server and surfaceflinger
mkdir /dev/memcg/system 0550 system system
start ueventd
# Run apexd-bootstrap so that APEXes that provide critical libraries
# become available. Note that this is executed as exec_start to ensure that
# the libraries are available to the processes started after this statement.
exec_start apexd-bootstrap
紧接着是一个Action,Action的Trigger 为early-init,在这个 Action中,我们需要关注最后两行,它启动了ueventd服务和apex相关服务。还记得什么是ueventd和apex吗?不记得的读者请往上翻越再自行回顾一下。
ueventd服务的定义也可以在init.rc文件的结尾找到,具体代码及含义如下:
service ueventd //ueventd服务的可执行文件的路径为 /system/bin/ueventd
class core //ueventd 归属于 core class,同样归属于core class的还有adbd 、console等服务
critical //表明这个Service对设备至关重要,如果Service在四分钟内退出超过4次,则设备将重启进入恢复模式。
seclabel u:r:ueventd:s0 //selinux相关的配置
shutdown critical //ueventd服务关闭行为
然而,early-init 这个Trigger到底什么时候触发呢?
答案是通过init.cpp代码调用触发。
我们可以在init.cpp 代码中找到如下代码片段:
am.QueueEventTrigger("early-init");
QueueEventTrigger这个方法的实现机制我们稍后再进行探讨,目前我们只需要了解, ActionManager 这个类中的 QueueEventTrigger方法,负责触发init.rc中的Action。
我们继续往下看init.rc的内容。
on init
...
# Start logd before any other services run to ensure we capture all of their logs.
start logd
# Start essential services.
start servicemanager
...
在Trigger 为init的Action中,我们只需要关注以上的关键内容。在init的action中启动了一些核心的系统服务,这些服务具体的含义为 :
| 服务名 | 含义 |
|---|---|
| logd | Android L加入的服务,用于保存Android运行期间的日志 |
| servicemanager | android系统服务管理者,负责查询和注册服务 |
接下来是late-init Action:
on late-init
//启动vold服务(管理和控制Android平台外部存储设备,包括SD插拨、挂载、卸载、格式化等)
trigger early-fs
trigger fs
trigger post-fs
trigger late-fs
//挂载/data , 启动 apexd 服务
trigger post-fs-data
# 读取持久化属性或者从/data 中读取并覆盖属性
trigger load_persist_props_action
//启动zygote服务!!在启动zygote服务前会先启动netd服务(专门负责网络管理和控制的后台守护进程)
trigger zygote-start
//移除/dev/.booting 文件
trigger firmware_mounts_complete
trigger early-boot
trigger boot //初始化网络环境,设置系统环境和守护进程的权限
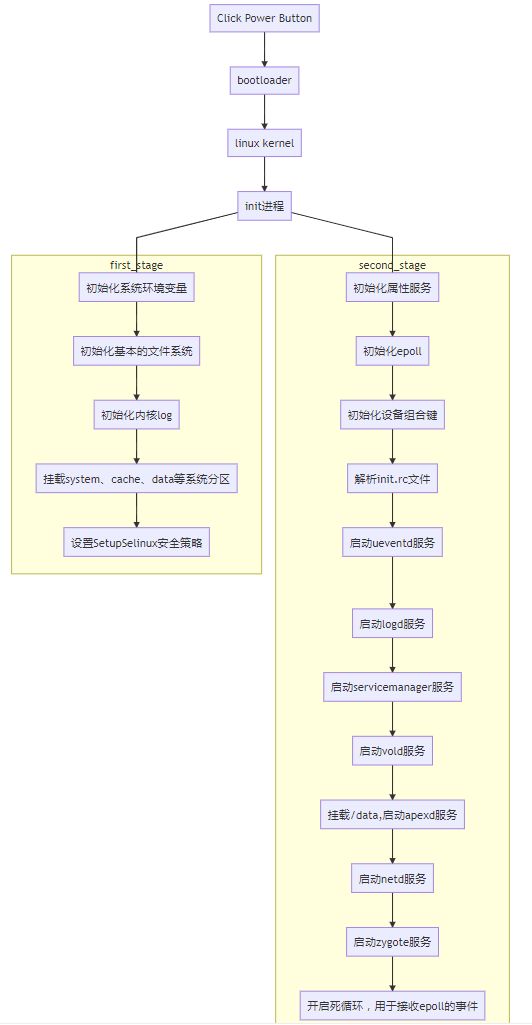
最后,我们用流程图来总结一下上述的启动过程:
以上就是Android 10 启动Init进程解析的详细内容,更多关于Android 10 启动Init进程的资料请关注脚本之家其它相关文章!