LeGO-LOAM(2):lego-loam源码imageProjection.cpp学习
目录
一、imageProjection
1.1 各种标记的含义
1.1.1 groundMat 地面属性矩阵
1.1.2 rangeMat 距离矩阵
1.1.3 labelMat 标签矩阵
1.2 点云分割函数
1.3 发布的话题
1.3.1 `"/full_cloud_projected"(sensor_msgs::PointCloud2)`
1.3.2 `"/full_cloud_info"(sensor_msgs::PointCloud2)`
1.3.3 `"/ground_cloud"(sensor_msgs::PointCloud2)`
1.3.4 `"/segmented_cloud"(sensor_msgs::PointCloud2)`
1.3.5 `"/segmented_cloud_pure"(sensor_msgs::PointCloud2)`
1.3.6 `"/segmented_cloud_info"(cloud_msgs::cloud_info)`
1.3.7 `"/outlier_cloud"(sensor_msgs::PointCloud2)`
# 参考链接
## 博客1
## 博客2
一、imageProjection
1.1 各种标记的含义
数据类型: cv::Mat
1.1.1 groundMat 地面属性矩阵
0 初始值
1 有效的地面点,判断条件:与相邻线束上点的夹角不超过10°
-1 无效的地面点
1.1.2 rangeMat 距离矩阵
FLT_MAX 浮点数的最大值,初始化信息
range 距离值
1.1.3 labelMat 标签矩阵
作用:用于将激光雷达点标记成不同类,除了无效点和异常点,剩下的非0标签的点均是具有“局部相邻点聚成一类”的特点
0 初始值
-1 无效点,判断条件:
groundMat.at(i,j) == 1 || rangeMat.at(i,j) == FLT_MAX labelCount 类别标签,不同数值表示不同类别,大于0的数值可不必纠结具体属于哪一类
999999 相邻点角度变化较大且不构成聚类的点,判断条件有两个:
if (angle > segmentTheta){ // check if this segment is valid
bool feasibleSegment = false;
// 如果allPushedIndSize 累加的数量增加到了30个,则判断这部分点云属于一个聚类
if (allPushedIndSize >= 30)
feasibleSegment = true;
// 如果垂直方向上点的数量大于5个,默认是一个有效的聚类
else if (allPushedIndSize >= segmentValidPointNum){
int lineCount = 0;
for (size_t i = 0; i < N_SCAN; ++i)
if (lineCountFlag[i] == true)
++lineCount;
if (lineCount >= segmentValidLineNum)
feasibleSegment = true;
}
// segment is valid, mark these points
if (feasibleSegment == true){
++labelCount;
}else{ // segment is invalid, mark these points
for (size_t i = 0; i < allPushedIndSize; ++i){
labelMat.at(allPushedIndX[i], allPushedIndY[i]) = 999999;
}
} 1.2 点云分割函数
参考论文:
Effificient Online Segmentation for Sparse 3D Laser Scans
Fast Range Image-Based Segmentation of Sparse 3D Laser Scans for Online Operation
知乎复现:
《地面点障碍物快速分割聚类》 https://zhuanlan.zhihu.com/p/72932303
1.3 发布的话题
rqt_graph图
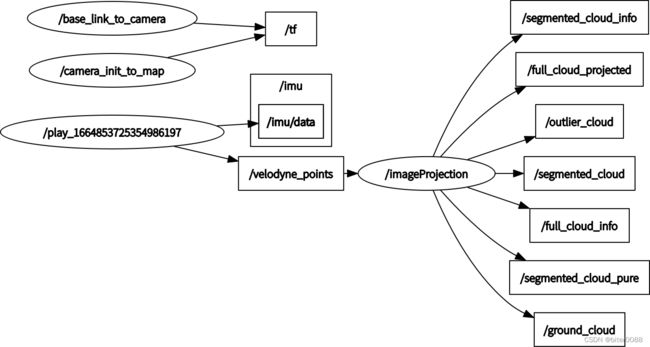
1.3.1 `"/full_cloud_projected"(sensor_msgs::PointCloud2)`
作用:存放三维空间坐标信息和投影后的二维行列信息
(1)初始化
初始化为无效点,并设置初始点个数大小:
nanPoint.x = std::numeric_limits::quiet_NaN();
nanPoint.y = std::numeric_limits::quiet_NaN();
nanPoint.z = std::numeric_limits::quiet_NaN();
nanPoint.intensity = -1;
//--------------------------
fullCloud->points.resize(N_SCAN*Horizon_SCAN); (2)存放信息
保存的信息为三维坐标信息和投影后的二维行列信息:
thisPoint.x = laserCloudIn->points[i].x;
thisPoint.y = laserCloudIn->points[i].y;
thisPoint.z = laserCloudIn->points[i].z;
//-------------------------------
// 将行索引和列索引存储在 intensity 中,整数部分是线束数值,小数部分是方向角度
thisPoint.intensity = (float)rowIdn + (float)columnIdn / 10000.0;
fullCloud->points[index] = thisPoint;1.3.2 `"/full_cloud_info"(sensor_msgs::PointCloud2)`
作用:存放三维空间坐标信息和距离信息
(1)初始化
初始化部分和1.3.1一样
(2)存放信息
保存的信息为三维坐标信息和距离信息:
range = sqrt(thisPoint.x * thisPoint.x + thisPoint.y * thisPoint.y + thisPoint.z * thisPoint.z);
//----------------------------------
fullInfoCloud->points[index] = thisPoint;
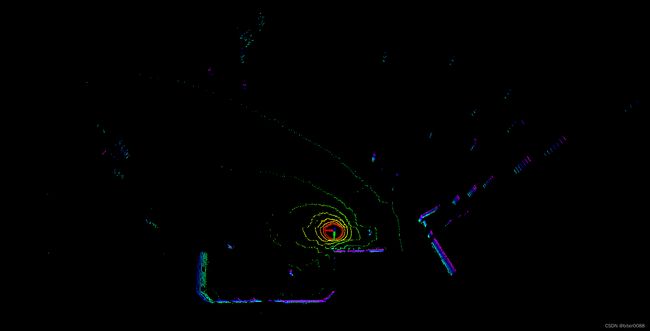
fullInfoCloud->points[index].intensity = range; // the corresponding range of a point is saved as "intensity"1.3.3 `"/ground_cloud"(sensor_msgs::PointCloud2)`
含义:原始稠密的地面点云(没有进行下采样)
初始化:只进行类型初始化,没有进行大小初始化
判断条件:
groundMat.at(i,j) == 1 地面点云特点:有0~7共8个扫描圈:

1.3.4 `"/segmented_cloud"(sensor_msgs::PointCloud2)`
含义:去除无效的点,并对地面点进行下采样(没有标签)
两个条件满足其一即可:
(1)`groundMat.at
if (j%5!=0 && j>5 && j(2)`labelMat.at
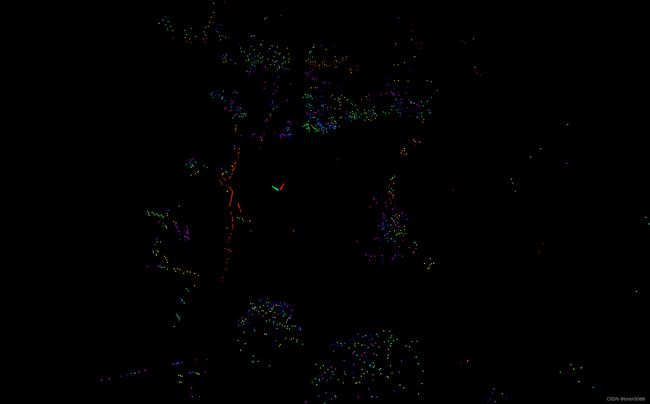
1.3.5 `"/segmented_cloud_pure"(sensor_msgs::PointCloud2)`
条件:不包括地面点和无效点:
labelMat.at(i,j) > 0 && labelMat.at(i,j) != 999999 含义:三维坐标值和标签值
segmentedCloudPure->push_back(fullCloud->points[j + i*Horizon_SCAN]);
segmentedCloudPure->points.back().intensity = labelMat.at(i,j); 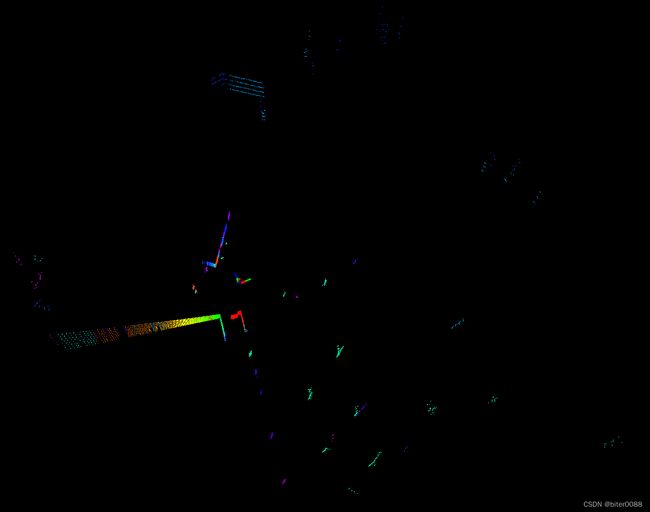
1.3.6 `"/segmented_cloud_info"(cloud_msgs::cloud_info)`
(1)初始化
segMsg.startRingIndex.assign(N_SCAN, 0);
segMsg.endRingIndex.assign(N_SCAN, 0);
//----------------
segMsg.segmentedCloudGroundFlag.assign(N_SCAN*Horizon_SCAN, false);
segMsg.segmentedCloudColInd.assign(N_SCAN*Horizon_SCAN, 0);
segMsg.segmentedCloudRange.assign(N_SCAN*Horizon_SCAN, 0);(2)赋值
获取一帧点云的开始角度和结束角度:
segMsg.startOrientation = -atan2(laserCloudIn->points[0].y, laserCloudIn->points[0].x);
// 加2*M_PI表示已经转了一圈
segMsg.endOrientation = -atan2(laserCloudIn->points[laserCloudIn->points.size() - 1].y, laserCloudIn->points[laserCloudIn->points.size() - 1].x) + 2 * M_PI;对每一个线束的起点和终点索引进行赋值:表示的是将第0线和第15线点云横着排列后。每一线点云有一个startRingIndex和endRingIndex,表示这一线点云中的一部分,如下图绿色部分。黑色部分是整体这一线点云中筛选出来满足条件的。(暂时不知道为什么这么选?)
segMsg.startRingIndex[i] = sizeOfSegCloud-1 + 5;
segMsg.endRingIndex[i] = sizeOfSegCloud-1 - 5;
对是否为地面点、列信息、距离信息进行赋值:
// 是否为地面点
segMsg.segmentedCloudGroundFlag[sizeOfSegCloud] = (groundMat.at(i,j) == 1);
// 列信息
segMsg.segmentedCloudColInd[sizeOfSegCloud] = j;
// 距离信息
segMsg.segmentedCloudRange[sizeOfSegCloud] = rangeMat.at(i,j); 1.3.7 `"/outlier_cloud"(sensor_msgs::PointCloud2)`
条件:
if (labelMat.at(i,j) == 999999){
if (i > groundScanInd && j % 5 == 0){
outlierCloud->push_back(fullCloud->points[j + i*Horizon_SCAN]); i > groundScanInd 表示 在第8线线束开始进行判断,前8线(0~7)线束主要是打到地面的,不需要怎么判断
j % 5 是为了进行降采样
# 参考链接
建议多个博客一块看
## 博客1
这个博客时间比较新,和我现在看的github源码(时间2022年10月2日 )是一致的
https://blog.csdn.net/m0_50610065/article/details/123834057
## 博客2
这个博客时间比较旧,但比较全有较多的图解
https://blog.csdn.net/wykxwyc/article/details/98317100