【论文阅读】Crop Classification in a Heterogeneous Arable Landscape Using Uncalibrated UAV Data
期刊:remote sensing
日期:2018.6
发表单位:苏黎世大学遥感实验室地理系
目录
Abstract
1. Introduction
2. Material
2.1. Study Area
2.2. Dataset
3. Method
3.1. Resampling
3.2. Feature Extraction
3.3. Data Splitting for Validation
3.4. Classifification
3.5. Spatial Support
3.6. Accuracy Assessment
4. Results
4.1. Spatial Resampling
4.2. Spectral Resolution
4.3. Number of SE Sizes
4.4. Number of Classes and Spatial Support
4.5. Class Specific Accuracy
5. Discussion
5.1. Inflfluence of Spatial Resolution
5.2. Impact of Spectral Characteristics
5.3. Effect of Different SE sizes
5.4. Inflfluence of Spatial Support
5.5. Considerations about Acquisition Date and Temporal Resolution
5.6. Comparison to Other Studies
5.7. Limitations of Our Method
6. Conclusions
Abstract
土地覆盖图对于农业地区的决策、监测和管理必不可少,但通常只有在收获后才能获得。为了及时获得瑞士高原小规模耕地景观的作物图,我们于2015年6月在无人驾驶飞行器(UAV)上使用消费者级相机,获得了未校准的、高分辨率的数据,空间分辨率为0.05米,四个光谱带。我们对数据进行了重新采样,以获得不同的空间和光谱分辨率,并使用纹理特征(一阶统计和数学形态学)、最佳性能的随机森林分类器以及结构元素的数量和大小对该方法进行了评估。我们的主要发现表明,总体表现最佳的数据包括0.5米的空间分辨率、三个光谱带(RGB红、绿和蓝)以及五种不同大小的结构元素。基于像素分类的全套作物类别的总体准确度(OA)为66.7%。如果合并了一组作物,OA增加约7%(74.0%)。对于基于单个田地地块的基于对象的分类,OA增加了约20%(全套作物类别的OA分别为86.3%和94.6%)。我们得出结论,当用于作物分类时,无人机在0.5 m空间分辨率的异质耕地景观中的使用最为相关。
关键词:消费级相机;土地覆盖;极高分辨率(VHR);随机森林(RF)分类器;基于对象的分类;基于像素的分类;小型农田;纹理空间特征
1. Introduction
农业对气候变化的反应非常敏感[1]。由于到2050年,世界人口预计将增长到96亿[2],全球粮食需求正在增加[3],因此,在全球[4]和地方范围内获得准确、及时的农业信息,对于确保不断增长的世界人口能够得到养活至关重要[5]。为了解决粮食不安全或粮食市场动荡的问题,遥感技术为评估这些挑战提供了广泛的机会[4,6]。
多年来,在遥感的支持下,农业和农艺学的许多方面都得到了解决[6]。其中包括产量估计[7]、生物量[8]、季节性植物发育和胁迫监测[9,10]、物候和活力[11]以及土地覆盖或土地利用变化[12,13]。
准确的土地覆盖评估是农业地区此类分析的基础[14],对于水资源规划[15]、产量估算的自动化短期监测[16]、可持续土地管理[17]、季末前作物建模[18]或高通量表型分析的地块提取[19-21]尤为重要。此外,目前的条件和土地覆盖范围需要作为气候变化建模的基础[22]。通常,关于耕地的信息只有行政单位才有封面,但由于数据保护条例的原因,缺乏空间分布的详细信息[23]或公众无法获取[24]。
在瑞士,农业景观主要以小型结构农田为特征[25]。通过直接付款支持农民在瑞士农业政策中发挥着关键作用。1996年,该政策从大多数农产品的承保担保改为提供服务的补偿[26]。今天,对瑞士农民直接付款的重点与保护文化景观、确保粮食供应、可持续生产、丰富生物多样性以及对景观质量的贡献相一致。将可耕地面积小范围细分为不同作物的一部分,确保了具有吸引力的景观,并促进了生物多样性[26,27]。最后,直接付款基于面积、丘陵地形补偿、单个作物及其各自组合[28]。除其他外,对特定作物的捐款用于油籽和甜菜,而对不同类型的谷物没有特殊兴趣。
迄今为止,各自的报告都是基于自我申报,同样,控制也是基于实地访问。准确核实作物类型对于补贴控制、监测与生物多样性相关的土地管理做法(如作物轮作、土壤保护和可持续施肥)以及将保护区和生态补偿区联系起来至关重要[26]。
从报告和控制中共享信息通常很耗时,而且不简单。当需要预警时,这一点至关重要[11],例如在缺水的情况下,当需要进行可持续规划时[15]。气候模型的未来预测表明,水在瑞士也将成为一种有限的资源[22,29]。由于灌溉用水需求取决于作物,因此规划需要准确及时的作物分配和面积信息。
由于瑞士的农业景观结构较小,因此需要空间分辨率很高(VHR)的数据来推导作物类型和农田范围[4,6,30]。获取VHR数据的常见传感器通常具有谱带数量有限的缺点,这限制了它们在应用纯光谱分类时的能力。因此,VHR数据中包含的纹理信息在数据分析中具有潜力[31-33]。一般来说,与辅助数据、多时间数据集或光谱指数等其他附加信息源相比,附加纹理特征的分类改进程度最高[34]。
来自RapidEye[35]、SPOT 5[36]、QuickBird MS[16]、IKONOS[16,37]、WorldView-2[38]或WorldView-3[14]的多光谱卫星数据已广泛用于评估农业地区的土地覆盖。这些数据集的典型空间分辨率在0.5米至6.5米之间,主要在可见光(VIS)和近红外(NIR)光谱范围内具有不同的光谱带(就数量、中心波长和带宽而言)。
如今,越来越多的无人机(UAV)提供了获取VHR数据的可能性。使用这种系统,可以以最佳空间分辨率灵活地记录数据。对于小比例尺农田的农业制图,建议使用0.5 m–3 m之间的空间分辨率来评估田间变异性[39]。运行中的无人机可实现定制数据采集,以支持定义和实施后续产品生成的专用处理链。
无人机的典型应用领域包括植被、环境、城市或灾害监测[40],以及农业部门的精确农业、土地覆盖测绘和牧场监测[41]。使用无人机获得的VHR数据已用于确定小农业区的土地覆盖率,面积达几平方公里[42]。与卫星或机载数据采集相比,无人机的操作成本更低[43,44],与破坏性测量方法相比,数据采集需要更少的人机交互[33],并且在天气条件和飞行计划方面更加灵活[33,40]。天气(如雨和风)和不利的太阳光照条件会对其造成限制。然而,由于无人机通常在低空飞行,因此在多云条件下也可以进行数据采集。在一些国家,合法无人机操作限制适用[43,45,46]。除此之外,无人机数据采集在一天中更加灵活,不受给定重访时间的限制,例如卫星,或大型机载平台的潜在飞行限制。
尽管目前无人机可以使用范围广泛的传感器,从消费者级摄像机到多光谱传感器,再到成像光谱仪[40],但其用于复杂高级产品的光谱校准需要额外的努力[47,48]。一方面,传感器在运行时需要进行校准,例如,在现场部署标准(白色)参考[49]。另一方面,必须知道传感器光谱带的准确光谱行为,才能最终得出物理量[50]。
在我们的研究中,我们使用了一个VHR数据集,该数据集由无人机携带的两个未校准的消费者级摄像机采集,用于作物分类。一个摄像头捕捉到常见的红、绿、蓝(RGB)波段,另一个摄像头则记录近红外、绿、兰(NirGB)波段的数据。将两个摄像头的数据合并为NirRGB数据集。我们提出了一种结合光谱和纹理信息的新方法,使用随机森林(RF)分类器[51]和来自未校准消费级相机的VHR数据,对瑞士高原典型小型结构化耕地景观中的农作物进行分类。在本研究中,我们分析了(i)空间分辨率,(ii)光谱带的选择,以及(iii)纹理特征的数量,即结构元素(SE)的不同大小,对每像素分类精度和聚集地块水平的影响。
2. Material
2.1. Study Area
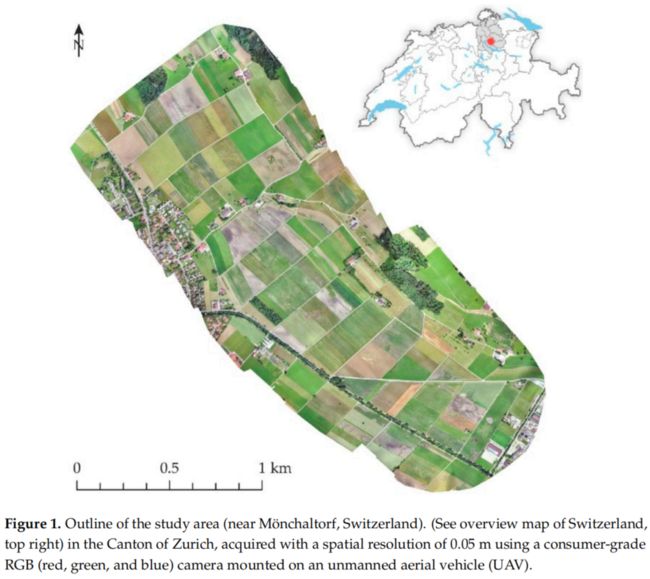
研究区域位于苏黎世州内的瑞士高原(47.312◦N、 8.733个◦E) ,瑞士(图1)。农村地区主要为农田和草地。试验场地海拔在440 m–570 m之间,气候可描述为暖温带潮湿,年平均温度约9.3◦C和年降雨量约1134 mm[52]。土壤主要包括粘壤土或壤土和寒武土[53]。
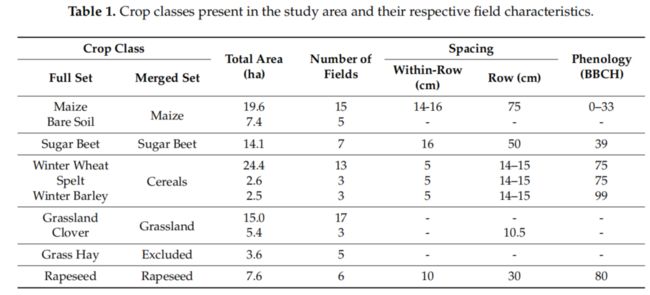
研究区域的主要作物类型为玉米、甜菜和冬小麦(表1)。
草地包括常年(永久)和一年生(即临时)植被。数据采集期间覆盖干草的田地和纯三叶草被视为单独的类别。斯佩尔特和冬大麦田数量少且面积小,也被考虑在内。油菜田占地面积较小,后来在裸地上种植了玉米。我们的研究排除了研究区域内少于三块田地的作物类型。此外,将各个作物类别分为广义、合并类别,以评估后续分类的性能(表1)。冬小麦、冬大麦和斯佩尔特被组合成谷物,草地类别与三叶草合并,玉米被扩展到包括纯土壤,因为玉米在今年晚些时候在这些地块上种植。干草覆盖的田地最终被排除在我们的分析之外,因为它们的外观各异。
 2.2. Dataset
2.2. Dataset
整个研究区域的面积为170公顷,其中102公顷被考虑在内。数据采集时间为2015年6月26日当地时间11:00至13:45,共四次飞行,每次飞行时间30分钟。每年的这个时候,所有调查的作物类型都出现了。农田的平均面积为1.3公顷,从0.03公顷到7.4公顷不等,长度为140 m–200 m,宽度为23 m–180 m。两块较大的农田面积分别为183×437 m2(8公顷)和465×87 m2(4公顷)。
2015年6月底,各种作物处于不同的物候期。我们根据“Biologische Bundesanstalt,Bundessortenamt und CHemische Industrie”确定了物候代码(BBCH)[54]。谷物处于成熟期,冬小麦和斯佩尔特处于乳熟期(BBCH 75),冬大麦处于衰老期(准备收割,BBCH 99)。玉米包括新播种到茎伸长阶段(BBCH 0-33),油菜刚刚开始成熟(BBCH 80),甜菜已达到完全覆盖土壤(BBCH 39)。对于草地和三叶草,由于它们受到一系列不同的管理,因此无法确定确切的物候期。由于放牧,草场的物候期是异质的,而在多年生和一年生草场的情况下,物候期的差异与不同的刈割策略有关,从整个牧场的完全割草到每天切割小块新鲜草料。
数据采集是在晴朗的天空条件下进行的,有一些冷凝痕迹。由于部署的eBee无人机的典型飞行时间(Sensefly,Cheseaux Lausanne,Switzerland)限制在大约30分钟,因此将整个研究区域分为两部分,以便在单个飞行中记录每个分区。对于每个分区,连续使用了1610万像素的佳能IXUS 125HS相机(红色、绿色和蓝色(RGB)波段(中心波长分别为660、520和450 nm),以及相同类型的改进型相机(近红外(NIR)、绿色和蓝色(NirGB)波段)(中心波长为720、520及450 nm)。使用eMotion2软件(瑞士洛桑Cheseaux Sensefly)执行飞行计划和后续图像采集。
飞行高度为地面以上150米,空间分辨率约为0.05米。图像是在横向重叠60%、纵向重叠75%的平行飞行路径上采集的。
在飞行过程中,根据UAV上的GPS和IMU测量值,总共对1092张单帧图像进行了地理标记。这些图像随后在Pix4D Mapper(Pix4D SA,瑞士洛桑)中进行处理。该软件使用运动结构(SfM)技术生成稠密点云、数字高程模型以及具有预定义空间分辨率0.05 m的镶嵌和校正图像产品。在处理过程中,添加了五个地面控制点(GCP),这些控制点是用地面上的差分GPS(dGPS)设备测量的,用于改进相机图像拼接的地理校正。RGB镶嵌和近红外波段最终与RGB相机的RGB波段叠加在一起,形成了一个由四个波段组成的VHR数据集
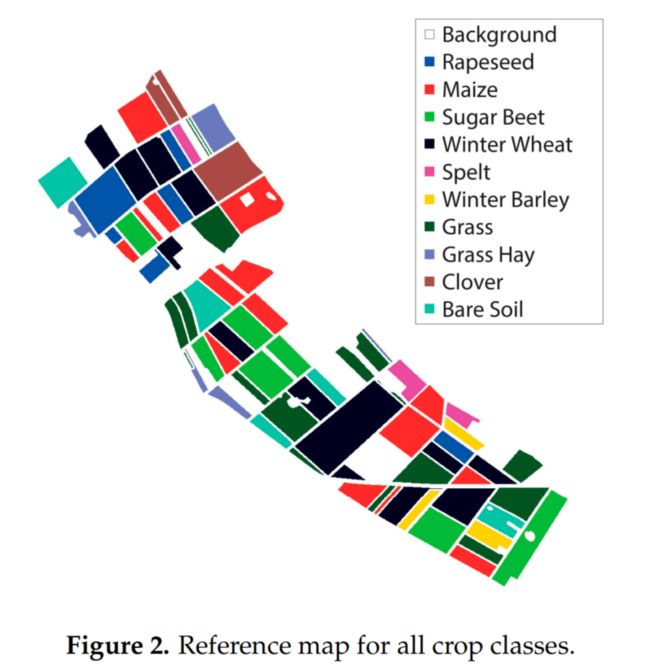
根据同时进行的实地调查和确定的地块边界,建立了研究区域的作物类型参考数据集(图2)。为了避免现场边界处的混合效应,采用2m的缓冲区进行分类培训和验证(见第3节)。
3. Method
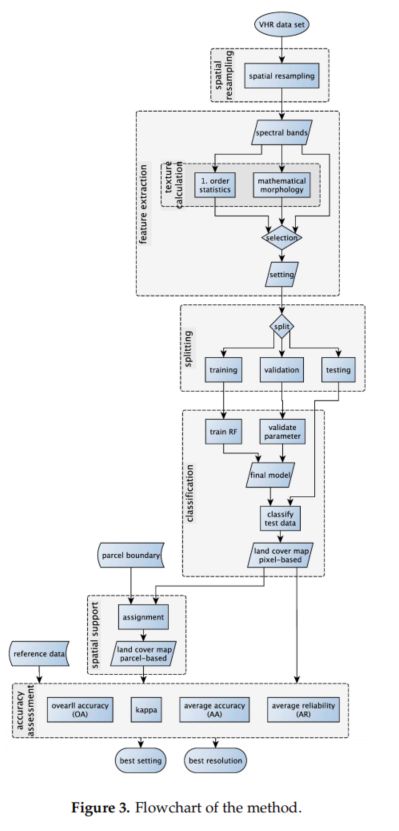
我们应用了一个强大的分类和准确性评估工作流,该工作流由几个步骤组成(图3)。首先,对VHR数据集进行重新采样,得到一系列空间分辨率,然后从中提取纹理特征。根据光谱特性和SE大小的数量,将这些数据集的特征汇编为六种不同的设置。然后将这些设置的数据分为三部分,用于(i)随机森林(RF)模型的训练,(ii)模型参数的验证,以及(iii)最终模型分类性能的测试。对于分类,我们使用了RF方法[51],该方法在之前的研究中得到了广泛应用,并成功应用[55]。经验证的分类模型最终应用于测试数据集,并对两种空间支持(即基于像素和地块的分类)进行精度评估。下面详细描述了我们方法的各个步骤。
3.1. Resampling
为了评估空间分辨率对分类精度的影响,我们使用双三次变换将VHR数据集重采样为0.1 m、0.25 m、0.5 m、0.75 m、1 m和2 m。通过应用最近邻法,将参考数据集重新采样到相同的空间分辨率。
3.2. Feature Extraction
为了将空间信息纳入分类链,计算了两种类型的文本特征,即一阶统计和数学形态学。使用了以下统计特征:平均值、标准差、范围和熵。形态学手术包括扩张/侵蚀、打开/关闭、打开/闭合顶帽、通过重建打开/关闭,以及通过重建顶帽打开/关闭[56–59]。相关公式见表2。
这些特征是基于SE计算的,即移动窗口。由于SE的形状和大小是决定性的,因此通常根据专家知识预先选择SE。由于我们数据集中的一些农作物(尤其是玉米和甜菜)是成排种植的,它们的方向对SE中分析的纹理有很大影响。因此,得到的特征值取决于植物行和SE之间的角度,尤其是在线性SE和矩形SE的情况下。为了保持旋转不变性,所有特征都是在圆盘状SE中计算的。
SE尺寸,即圆盘直径,是根据研究区域内植物行之间的测量距离选择的,目标是在空间分辨率为5cm的情况下,至少包括两行植物。三叶草的两行间距为10.5 cm,谷物为14 cm–15 cm,油菜为30 cm,甜菜为50 cm,玉米为75 cm(表1)。为了评估至少两个作物行的纹理,选择3、5、9、13和29像素的直径作为SE尺寸。我们对所有空间重采样数据集应用相同的SE大小。
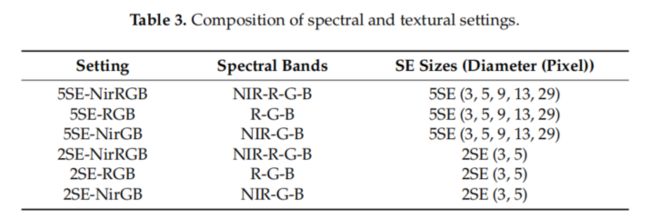
在随后的分析中,共形成了六种光谱带和SE大小的组合,即所谓的设置(表3)。它们基于三组光谱带,即两个相机(NIR、R、G、B)的一组所有可用波段,以及分别代表两个相机的两个光谱子集(NirGB和RGB)。这些光谱数据集分别应用于所有SE大小(5SE)和两种SE大小(2SE),直径分别为3和5像素[38,60]。添加的纹理特征专门建立在相应的光谱子集上。这些设置根据各自的光谱带和SE大小命名(例如,5SE NirRGB,包括所有光谱带和所有SE大小的所有纹理特征)。

 3.3. Data Splitting for Validation
3.3. Data Splitting for Validation
数据集分为三部分进行三次交叉验证,其中一次用于RF分类器的训练,一次用于验证RF参数,最后一次用于测试以确定分类精度。这确保了只有未用于培训和验证的数据才用于分类[61]。因此,将整个字段随机分配给其中一个数据子集,从而将作物类的三分之一字段分配给分割。为了避免这些影响分类的分割特定任务,所有六种可能的排列,称为折叠,都被执行。
3.4. Classifification
为了训练RF并验证模型参数,从相应的训练和验证数据集中选择了一组每类1000个分层随机采样像素。RF分类器使用MATLAB版本2016a中的原生TreeBagger实现。通常,树的数量是通过初步测试预先选择的[38],或者可以使用默认值[18]。
在我们的案例中,我们用20个对数均匀分布的值(10到1000棵树之间)训练RF,以确定最佳树数。最小叶片尺寸为3,以避免过密。对于所有其他参数,将保留默认设置,特别是每次拆分时所有要素的平方根。
在第一步(方程式(1))中,我们计算了正确分类的验证像素的比例,并将其拟合为形式的指数函数
![]()
使用非线性最小二乘法,a和b的初始值为0,c的初始值是1。预先研究表明,该模型和这些参数是最合适的。
然后,我们在1000棵树中选择精度损失为0.1%的树的数量,与使用拟合函数获得的最佳精度相比。然而,为了确保稳定性,我们设置了至少100棵树的阈值。最后,我们用确定的树数以及所有训练和验证像素训练最终模型进行分类。对于基于像素的分类,该最终模型适用于各个折叠中测试数据的所有像素。
3.5. Spatial Support
地块级别的数据平滑通常应用于农业分类结果[16]。使用最近邻法将地块重新采样到各自的空间分辨率。基于像素的分类之后,将地块内最常见的标签分配给相应地块的每个像素,从而生成基于地块的分类结果。
3.6. Accuracy Assessment
每个褶皱的测试数据集的混淆矩阵构成了计算总体准确度[62]、kappa系数[63]以及用户和生产者准确度[62]的基础。为了获得更好的整体视图,我们对每个折叠获得的值进行了平均。总准确度(OA)是指六倍总准确度值的平均值,由相应的褶皱。这是一种非常常用的准确度测量方法,可以与其他研究进行比较[34]。Kappa是指Kappa系数,平均准确度(AA)是指用户准确度的平均值,平均可靠性(AR)是指生产商准确度的均值。
4. Results
我们首先介绍总体最佳性能设置(即5SE-RGB),然后介绍空间重采样、光谱带选择和特征量(即SE大小)的影响。我们显示了像素和地块的空间支持结果,以及完整和合并的裁剪类集。
基于OA给出并讨论了所有类的所有结果。这里没有详细描述获得的kappa、AA和AR,尽管相应的值可以在表S1–S4中找到,准确度值的简明摘要在表4和表5中给出。随后,我们还提供了特定类别的UA和PA值。
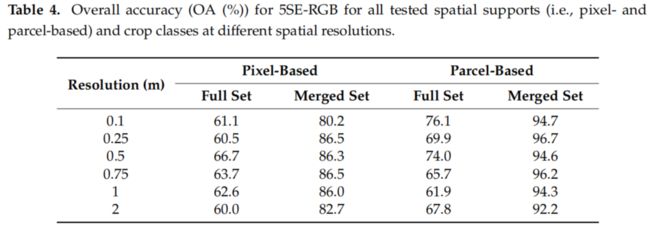
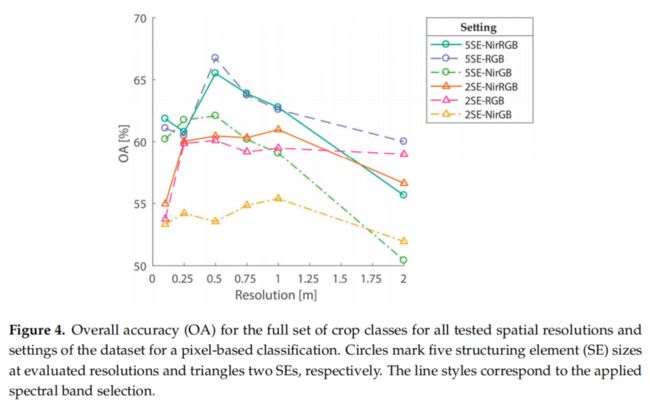
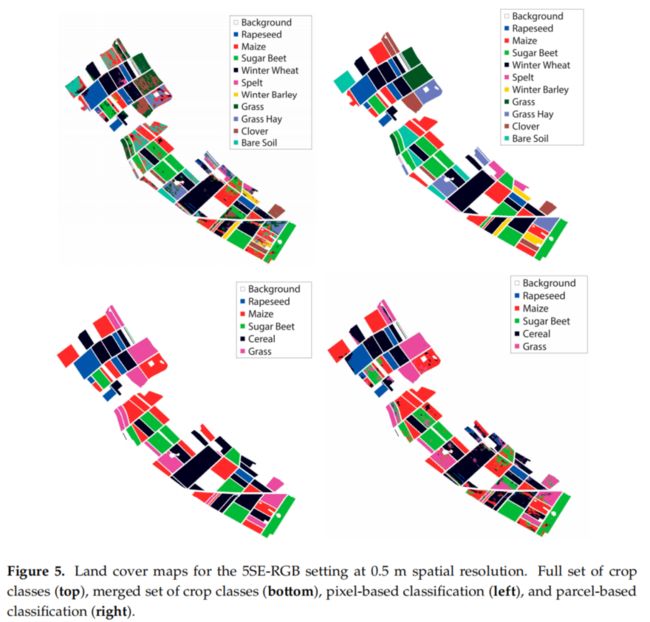
5SE-RGB设置在0.5 m的空间分辨率下获得了最佳精度值(图4)。对于基于像素的分类,OA达到66.7%,而对于基于地块的分类,全套作物类别的OA达到74.0%(表4)。相应的土地覆盖图见图5。
对于合并的类别集,基于像素的分类在OA和AA方面的0.75m空间分辨率达到了最佳值(OA 86.5%,kappa 0.823,AA 85.8%,AR 87.9%),而在kappa和AR方面的0.25m空间分辨率达到最优值(OA86.5%,kppa 0.823,AA 85.47%,AR 88.1%)(表S3)。然而,计算的精度测量值之间的差异很小。就OA而言,0.75 m和0.5 m的空间分辨率之间的差异为0.050%(kappa:0.000%,AA:0.204%,AR:−0.127%). 对于基于地块的分类,最佳性能是空间分辨率为0.25 m,OA为96.7%,比0.5 m高2.1%(表S4)。
4.1. Spatial Resampling
关于测试的空间分辨率的OA值,大多数设置显示了一个类似的模式,用于全套作物类别的基于像素的分类(图4)。最大OA约为0.5 m,空间分辨率越高或越低,OA值越小(表4)。
在基于像素的分类中,对于全套作物类别,最佳表现设置(5SE-RGB)的OA从空间分辨率为2m时的60.0%上升到0.5m时的66.7%(表4)。然后,在0.1 m处下降至61.1%。对于合并的类别,OA从2 m处的82.7%上升至0.5 m处的86.3%,并在0.1 m时下降至80.2%。
对于基于地块的分类,不同的空间分辨率对于完整和合并的作物类别集表现最佳(图S2和S3)。对于整个集合,0.5 m的空间分辨率产生最佳分类精度,但某些设置在0.1 m空间分辨率下的性能稍好一些。对于合并的类别集,在0.25 m或0.75 m空间分辨率下达到最高精度,在0.5 m时稍低。
4.2. Spectral Resolution
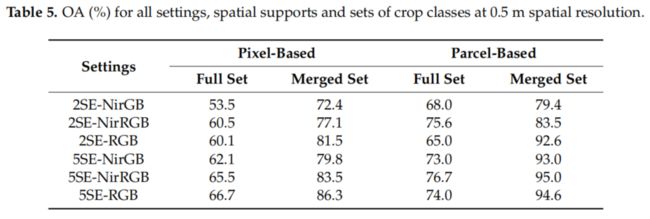
关于基于像素的分类的光谱分辨率,RGB设置通常比具有附加NIR波段的设置具有更好的性能(图4和表5)。没有红色带(即NirGB)的设置性能较差。对于全套作物类别和具有五个SE(5SE)的设置,这仅适用于0.5 m和2 m的空间分辨率(表S1)。对于其他考虑的空间分辨率,5SE NirRGB在OA方面的性能略优于5SE-RGB。
5SE NirGB的OA值始终低于5SE NilRGB和5SE-RGB,但空间分辨率为0.25 m的情况除外,其中5SE Nir GB设置效果最佳。对于SE尺寸较小的设置,2SE NirRGB优于2SE RGB,但分辨率为2 m的设置除外。2SE Nir GB设置的分类OA值始终低于其他设置。对于合并的作物类别集,上述语句适用于所有空间分辨率和SE大小的数量(图S1)。
与NirRGB和NirGB设置相比,使用RGB频带的设置可以获得更好的分类结果,而与空间分辨率和SE大小无关(表5)。平均而言,对于全套作物类别,RGB设置的OA比NIR-RGB高6%,与NirGB相比,OA高9%,对于合并的类别,OA分别高7%和10%。
在全套作物类别的基于地块的分类中,四波段设置表现最佳,其次是RGB和NirGB设置,但0.1 m和2 m空间分辨率的设置除外(表S2)。与SE大小的数量无关,2SE-RGB和5SE-RGB设置在2 m空间分辨率下比NirRGB设置获得更好的精度。此外,5SE-RGB在0.1米的空间分辨率下表现最佳。对于合并的裁剪类,RGB设置表现最佳,其次是NirRGB和NirGB设置。
4.3. Number of SE Sizes
通常,对于相同的光谱和空间分辨率,SE大小的数量越大(5SE),因此纹理特征越多,分类精度越高,而减少的数量(2SE)越少(表5)。然而,对于空间分辨率为0.75米和1米的全套作物类别的基于地块的分类,2SE设置优于5SE设置(图S1),对于合并的类别集,2SE分别优于5SE(图S3)
4.4. Number of Classes and Spatial Support
在最佳总体设置(即,5SE-RGB,0.5 m)的情况下,合并作物类别集的分类结果产生的OA比基于像素的分类的完整集高19.6%,而基于地块的分类的OA则高20.6%(表5)。两个空间支持之间的OA差异对于全组作物类别分别为7.3%,对于合并组分别为8.3%。
4.5. Class Specific Accuracy
对于全套作物类别,类别特定精度在7.4%(干草的UA)和100%(各种作物的PA,例如甜菜)之间,以实现最佳设置,即空间分辨率为0.5的5SE-RGB和基于地块的分类(表S5和S6)。对于基于像素的分类,范围稍小,介于10.8%(干草的UA)和91.8%(油菜籽的PA)之间。主要混合物发生在玉米和裸地之间,另一方面发生在草地、玉米和甜菜之间。这三种谷物类型主要相互混合。草原、三叶草和干草也是如此。
使用NirRGB设置中的附加NIR波段,特定于类别的精度稍好。因此,与5SE-RGB设置相比,基于像素的分类(表S1)的AA略微增加至60.0%,AR增至64.7%,基于地块的分类(图S1)为70.3%(AA)和78.0%(AR)。类之间的混合保持不变,但可以减少。特别是,谷物和裸土的UA和PA可以提高约10%。
对于合并的类集,基于像素的分类的UA范围为17.0%,基于地块的分类的范围为14.8%。基于像素的分类的PA范围为15.5%,基于地块的情况为17.5%(表S6)。主要混合发生在草地、玉米和甜菜之间。此外,油菜与谷物混合,谷物与玉米和草地混合。
对于某些作物类别,通过额外的近红外波段和更精细的空间分辨率,UA和/或PA可以略有改善。对于0.25 m的空间分辨率,基于地块的分类的AR增加了1.5%。使用其他设置和分辨率时,AA的增加可以忽略不计,对于合并作物集的基于像素的分类,AA和AR的增加也可以忽略。
5. Discussion
开发了一种包含纹理特征的基于森林的随机分类方法,以评估空间分辨率、光谱带的选择以及不同SE大小的数量对未校准、基于无人机的VHR数据集的分类精度的影响。总体而言,最佳性能设置为5SE-RGB,空间分辨率为0.5 m(图4)。对于全套作物类别,基于像素的分类实现了66.7%的OA。对于基于包裹的分类,OA增加了7.3%,达到74.0%。对于合并的作物类别集,可以观察到类似的行为,基于像素的分类的OA为86.3%,而基于地块的分类则增加了8.3%至94.6%。
5.1. Inflfluence of Spatial Resolution
附加的纹理特征以及光谱数据可以改善分类结果,但这些特征取决于传感器的空间分辨率以及SE的大小和数量。这与[34]一致,他发现额外的纹理特征导致了分类的最高改进。然而,在粗分辨率的情况下,纹理并不总是能够改善结果,正如奥地利农业区的作物绘图所示,其空间结构与我们的研究区域相似,并使用10 m分辨率的Sentinel-2数据[18]。
数据集的空间分辨率至关重要,因为它决定了细节的程度。一方面,造成作物纹理效应的因素是行距和另一方面,在植物行距内,以及植物之间可见的裸露土壤。在全冠层关闭时,这种影响主要是由叶片的阴影和不同叶片角度的不同反射特性引起的[64]。在粗分辨率数据集(几米)中,所有这些影响都集成在单个像素的测量中,而在高分辨率数据(几厘米)中,背景中不同的叶片角度甚至土壤上的鹅卵石都由单个像素捕获。因此,最佳空间分辨率是由这样一个事实驱动的,即像素的类间可变性允许区分作物类型,而不会因类内变化而妨碍分类算法。
对于工业管理作物,纹理效果在很大程度上取决于行内和行间距之间的间距[37]。通常,单株植物(或种子)放置在最佳的相互距离,以获得最大可能产量[65],或者更确切地说,利润[66]。因此,最佳分类精度是在最佳空间分辨率下实现的,其中(纹理)特征的类内变异性小于类间变异性[60]。
就作物而言,类内变异性和类间变异性都随着空间分辨率的提高而下降。因此,最好的空间分辨率是在类内和类间可变性之间进行权衡[67]。一方面,类内可变性需要最小化。当一个像素覆盖多个植物时,就可以实现这一点。另一方面,类间差异应尽可能大。对于较粗的分辨率,类中的相邻像素变得更相似,因此,不同类的纹理属性会收敛。
行内和行距影响作物的纹理特征。在我们的研究地点,只有甜菜和玉米尚未在6月底完全关闭冠层。因此,最佳空间分辨率与这两类的行间距在同一范围内。对于甜菜,行距为0.5 m,该值等于最佳空间分辨率。由于玉米田处于(i)非常早和(ii)异质物候期(表1),因此它们的行距对最佳空间分辨率没有显著影响。
然而,最佳空间分辨率也取决于空间支持、作物种类和数量。对于合并了一组作物类别的基于像素的分类,最佳空间分辨率略粗,即0.75 m的空间分辨率表现最佳(表4)。与全套作物类别相比,不再区分草地和三叶草以及不同谷物。对于基于地块的分类,基于0.25 m空间分辨率的数据集比0.5 m像素大小的数据集具有更高的分类精度(图S3)。
总之,尽管某些类别或空间支撑的精度损失很小,但0.5 m的空间分辨率通常表现最好。这与[39]的研究结果相一致,其中0.5 m的空间分辨率是使用多光谱传感器的红色波段分析牧场田间变异的最佳分辨率。
许多研究都是基于较粗空间分辨率的数据集进行的,例如通过中分辨率成像光谱仪(MODIS)或陆地卫星获得的数据集,并为大规模现场监测提供足够的空间、光谱和时间分辨率[6]。它们与我们研究的主要差异与瑞士高原普遍存在的田块大小有关,比其他地方小。例如,在美国中部大平原等农业地区,单块田地更大,田地面积超过30公顷[13]。这些地区的规模没有瑞士小。因此,需要更高空间分辨率的数据来分析像我们这样的研究区域的作物类型[4]。
5.2. Impact of Spectral Characteristics
一般来说,如我们的研究所示,星载仪器的遥感数据比使用无人机携带的未校准消费级相机获得的VHR数据具有更有利的光谱和辐射规格。与我们的系统仅获取RGB波段和附加近红外波段的数据不同,例如Landsat 8或MODIS的数据集提供了更宽的光谱范围,在近红外和短波红外光谱区域有许多波段。此外,星载仪器的光谱特性在光谱带宽和全宽方面得到了更好的定义最大值的一半(FWHM)。然而,我们的研究表明,根据各自的VHR数据并遵循拟议的分类方法,生成记录精度的作物图是可行的。
许多研究记录了使用近红外波段[33,37]或红边区域的波段[35]进行作物分类的好处。然而,在我们的研究中,总的来说,近红外波段并没有改善OA。改进后的佳能IXUS 125HS相机的近红外波段覆盖了约690–730 nm的波长区域,其中植被和裸土的数据值在采集的数据集中非常相似。此外,光谱范围约为640–680 nm的红光带紧邻近红外波段。因此,RGB波段配置可实现最高精度。NirGB通常表现最差的事实表明了红带在我们星座中的重要性。事实上,我们发现植被和裸地的遥感数据值的差异在这一波段最为明显。因此,没有近红外波段的RGB设置总体性能更好。只有在基于地块分类的合并作物类别集的情况下,5SE NirRGB设置的OA比5SE-RGB设置稍好。然而,甜菜和草地的分类将受益于额外的近红外波段的分类精度(UA和PA,如第4.5节所述),但只能与更高的空间分辨率相结合。由于三种谷物作物(即冬小麦、冬大麦和斯佩尔特)的光谱特性非常相似,任何额外的光谱信息都可能提高分类性能。
5.3. Effect of Different SE sizes
除了空间和光谱分辨率对分类结果有影响外,越来越多的SE尺寸提高了分类精度。形态特征通过放大或擦除暗元素或亮元素来保持或擦除SE中的元素,从而形成纹理[56]。
如第5.1节所述,作物的主要结构元素是植物和裸土。根据太阳的位置,阴影会导致暗部。由于不同的作物在行距和行距内的耕作方式不同,因此SE大小必须以捕获所有现有间隙的方式来定义[60]。因此,使用五个SE大小(5SE)的设置比只考虑两个SE大小的设置(2SE)性能更好,因为SE大小应与当前作物及其间距相对应。
5.4. Inflfluence of Spatial Support
基于对象(即基于地块)的分类改进了分类结果[33],被认为是作物制图的最先进技术[16]。在我们的例子中,它将基于像素的分类在OA方面提高了20%。所需字段边界来源于额外的数据源[16]、从头开始手动数字化[38]或无监督分割[42]。对于瑞士高原的农村地区,手工数字化单个地块是可行的,因为田地边界通常在几年内保持稳定。
5.5. Considerations about Acquisition Date and Temporal Resolution
农作物的准确分类取决于数据采集的合适时间点,因为农作物的物候期变化很快[4]。到6月底,除玉米外,我们研究区域内的所有作物均已种植。每年的这个时候,除玉米和甜菜外,大多数培养物都处于成熟的最后阶段。其他研究也考虑了更早和更晚的采集日期,但得出结论,成熟度是单时间分析最有希望的物候期[16]。收购日期较晚(如8月30日)会导致混乱,因为一些冬季作物已经收割[18],而更早的收购日期可能会影响裸地和小型植物之间的区别[16,18]。在我们的数据集中,这个问题适用于处于早期物候期的玉米,因此,玉米与裸土混合。此外,各个玉米田之间的物候变异很大。在多时间分析中,据报道,7月底之前获得的数据集是最重要的,后期的数据集只会导致分类结果[15]。然而,单时间数据集的分类可以达到与多时间数据集类似的精度[18]。
5.6. Comparison to Other Studies
当我们将0.5 m最佳空间分辨率的研究结果与其他研究进行比较时,不仅需要考虑数据集的空间和光谱特性,还需要考虑纹理特征的不同SE大小的数量。可以看出,完整和合并作物类别集的分类精度存在差异,结果也取决于实际类别和空间支持。
最近一项基于加拿大安大略省中部多级分类的研究,主要目的是区分树种[42]。在基于包裹的分类中,玉米、小麦、大豆和苜蓿被归类为副产品。数据集也是使用eBee UAV获得的,但使用不同的摄像机获取光谱校准数据。使用鹦鹉红杉传感器采集的数据集(绿色、红色、近红外和红色边缘带,空间分辨率为12.9 cm),该研究实现了89%的OA。同时,获取了RGB真彩色数据集(空间分辨率为3.42 cm),作为对OA为83%的作物进行分类的基础。最后,部署了一台Sony DSC-WX220 RGB相机(我们研究中使用的相机的后继者),以获取空间分辨率为3.52 cm的数据集。利用该数据集,作物分类的OA为81%。除了光谱带,作者还使用了纹理和归一化植被指数(NDVI)特征。
使用我们研究中提出的方法和5SE-RGB设置,对于合并类的基于地块的分类,我们在0.5 m的空间分辨率下实现了94.6%的OA。基于0.1 m的空间分辨率,我们仍然可以实现92.8%的OA。我们的方法性能稍好,很可能是因为重新采样的空间分辨率较粗。尽管有额外的校准和NDVI特征,上述研究的OA精度略低。
另一项对来自下奥地利Marchfeld地区的模拟Sentinel-2数据的分类研究获得了76.5%的OA[18]。作者使用基于对象的方法,仅基于光谱特征对七种农业文化(胡萝卜、玉米、洋葱、大豆、甜菜、向日葵和冬季作物)进行分类。与我们的研究相比,准确度较低可能是因为数据采集日期不利(8月30日)。当时,冬季作物已经收割,因此根据裸露土壤和作物残留物的光谱特征进行分类。收获地的高土壤比例导致与洋葱地混淆。然而,他们的基于像素的分类表现更好(OA为83.2%),尽管与我们的案例相比,在类特定的准确性上具有更高的可变性。
进一步的单时间研究分析了土耳其西北部布尔萨一个农村地区的Ikonos数据集,6月13日获得的空间分辨率为4m[16]。仅使用了数据集的R、G、B和NIR波段。使用基于SVM的方法,基于像素的玉米、牧场、水稻、甜菜、小麦和番茄分类的OA达到83.6%。基于包裹的分类使OA提高了12.5%。与我们提出的应用于合并作物类别集的方法相比,本研究实现了基于像素的分类的略低OA,以及基于地块的分类方法的略好OA。
作物高度是一个额外的参数,可以从UAV数据中获得。在[68]中,作者使用了美国德克萨斯州6月30日和10月21日空间分辨率为0.8 m的RGB和NIR数据两次采集之间的表面高度差。可以看出,仅作物高度一项,分类质量是有限的,因为即使在单个田地中也存在较大差异。因此,作者还使用了光谱、纹理和空间特征,基于对象的方法的OA达到97.50%,基于像素的最大似然(ML)分类的OA为78.52%。
当不使用高度信息时,OA精度降低2.5%。报告的土地覆盖包括玉米、棉花、高粱、草、裸土和小麦,与我们合并的作物类型设置相当。我们基于包裹的分类的OA类似于没有作物高度信息的报告案例。在基于像素的情况下,我们的OA大约提高了10%。
2015年7月,在同一地区进行了进一步的研究,使用RGB和近红外摄像机以0.35 m的空间分辨率采集了五种作物类别(即棉花、玉米、高粱、大豆和西瓜)和五种非作物类别(如不透水地面、裸土、休耕地、水、草和森林)的数据[69]。作者用基于像素和地块的分类测试了各种分组。基于像素的分类基于三波段设置(RGB)或四波段设置(NirRGB)。仅基于光谱带,基于像素的分类在包含所有作物的最具可比性分组中实现了62%至69%的OA,在非作物的单一类别中实现了OA。
在我们的环境中,利用纹理特征和全套作物类别,我们获得了相当的准确度(OA为66.7%)。然而,我们合并的一组作物类别以86.3%的OA超过了[69]的所有类别。对于基于地块的分类,作者还使用了植被指数(VIs)以及统计、几何和纹理特征。与我们的研究相反,他们发现OA有了一个额外的NIR带,这可能是由基于NIR带的VIs引起的。
根据波段的设置和数量,它们的OA在73%到91%之间。因此,与我们的全套作物类别(OA 74.0%)相比,它们基于地块的结果稍好一些,但与我们合并的作物类别(94.6%)相比,精确度稍低。
在同一地点的另一项研究中,空间分辨率为0.4米的NirRGB数据集被提升至1、2、4、10、15和30米像素大小[70]。作者在RGB数据集中对棉花、高粱、大豆、西瓜、非作物植被和非植被区域进行了分类,OA为83.3%,而在NirRGB数据集中,OA则为90.42%,空间分辨率为0.4 m。对于较粗的像素尺寸,OA下降到70%以下。与我们的最佳性能设置(0.5米空间分辨率的5SE-RGB)相比,OA为86.3%,它们在RGB情况下达到了类似的精度。同样,随着NIR频段的增加和VI的实施,它们的性能提高了7%。
5.7. Limitations of Our Method
我们的方法和使用的数据集都有一些局限性。除了光谱带,目前的方法主要依赖于纹理特征。额外的光谱或多时间特征可以改进分类[34]。到目前为止,只有光谱带本身被合并,但进一步的光谱特征,例如光谱指数,可能会导致性能的改进[31]。
由于基于地块的分类具有更高的精度,因此需要有关田地边界的辅助信息。由于这些信息并不总是可用的,因此也可以使用条件随机场(CRF)平滑来均匀化某个字段基于像素的分类的类别分配,这只会导致精度稍低,但不依赖于其他信息源[16]。或者,字段内的段分类也可以改善结果[42]。
从红杉鹦鹉传感器和我们改进后的佳能IXUS 125HS相机(包含近红外波段)的比较中可以看出,将近红外波段设置为约800 nm而不是720 nm很可能会改善分类[42]。这将允许适当纳入植被指数(例如,NDVI、广义差异植被指数(GDVI)或土壤调整植被指数(SAVI))。此外,应进一步分析各个波段的空间分辨率,因为与红色波段相比,近红外波段的分辨率更粗可能会导致类似的结果[39]。
6. Conclusions
我们提出了一种基于安装在无人机上的未校准消费级摄像机获取的数据集的作物分类方法。我们分析了不同的空间和光谱分辨率,以及纹理特征的不同SE大小。我们研究了基于像素和地块的空间支持和两组裁剪类。一方面,我们分析了九个单独的作物类别,另一方面,将玉米和裸地、三种谷物类型以及草地和三叶草混合在一起。
总体而言,在空间分辨率为0.5m的情况下,由RGB波段和五种结构元素(SE)大小的纹理特征组成的数据集取得了最佳性能。我们能够证明,空间分辨率越细和越粗,性能越差。将RGB波段纳入的设置该账户的表现优于其他近红外波段。尽管如此,近红外波段在一定程度上导致了特定类别的改进,但在将所有作物分类在一起时,会导致作物图的精确度稍低。覆盖作物行内和行间距整个范围的SE尺寸表现更好。因此,我们测试的五种SE大小的设置优于两种SE大小。
作物类别的减少导致了更好的分类结果(OA增加了约7%)。与其他研究一样,我们无法正确区分三叶草和草地以及不同谷物类型。玉米处于从新鲜播种到茎伸长的异质物候期,因此不能与裸地区分。正如预期的那样,与基于像素的分类相比,基于地块的分类在OA方面提高了约20%。
我们得出的结论是,空间分辨率为0.5 m的数据集,由光谱特性较差和未校准的RGB带组成,可以提供足够的信息来区分农业作物类别,前提是以适当的方式考虑了一组描述纹理特征的SE大小。随着越来越多的星载VHR图像在不久的将来投入使用,本研究中提出和评估的分类方法有助于在小规模农业地区生成记录准确的作物地图。