【2020年“TI杯”模拟电子系统设计专题邀请赛回顾——D题:目标跟踪系统(全国二等奖)】
一.2020年赛事简介

1.全国大学生电子设计竞赛“TI杯”模拟电子系统设计专题邀请赛,是全国大学生电子设计竞赛的一项专题邀请赛。大赛邀请的学校主要是设置电子信息或电气工程本科专业,以及部分在电子信息或电气工程专业领域有影响或有特色的学校。每个学校不超过两支参赛队伍。
2.此项比赛一般持续两天一夜,比赛过程中不得上网查阅资料,手机也会在比赛开始前上交,属于一项全封闭的比赛。参赛形式与传统的电赛类似,每只参赛队不超过三名成员,根据赛题要求在规定时间内完成作品。
3.本届比赛的时间是9月18日上午8:00至9月19日晚上23:00。地点在南京邮电大学。共有来自全国48所学校,90支参赛队伍。(其中985院校20个)
注:比赛过程中只能使用赛场提供的芯片,电阻、电容等元件可自带。开发板只能使用TI公司发的launchpad(MSP430、MSP432、C2000等)。
二.赛题简述
★本届比赛共有A、B、C、D四个赛题。我们组选择的是D题:目标跟踪系统。相比于其他三个赛题,该题几乎全是软件编程,硬件部分很少。该题最终有17支队伍选择。(所有的赛题和我们组的技术报告会在本文最后给出下载链接)
★D题的任务要求是:以自主循迹运动的电动车作为目标靶,目标跟踪系统使用毫米波雷达传感器,发现目标靶并用安装在二维云台上的LED手电筒指向目标把。(其中毫米波雷达是TI公司提供的AWR1843车载毫米波雷达模块,电动小车是TI公司提供的TI-RSLK机器人系统开发套件(基于MSP432P401R))
★打分要求(简略):
1.编程使小车可循迹,速度平稳,能识别停止标志;
2.小车可实现速度的自由设定;
3.目标跟踪系统可识别并测量小车的行进速度、方向及行进距离,并在运动结束后可描绘出小车的运动轨迹。
4.二维云台可准确跟踪小车,LED手电筒照射能锁定小车。小车在被照射后有声光响应。
三.设计方案
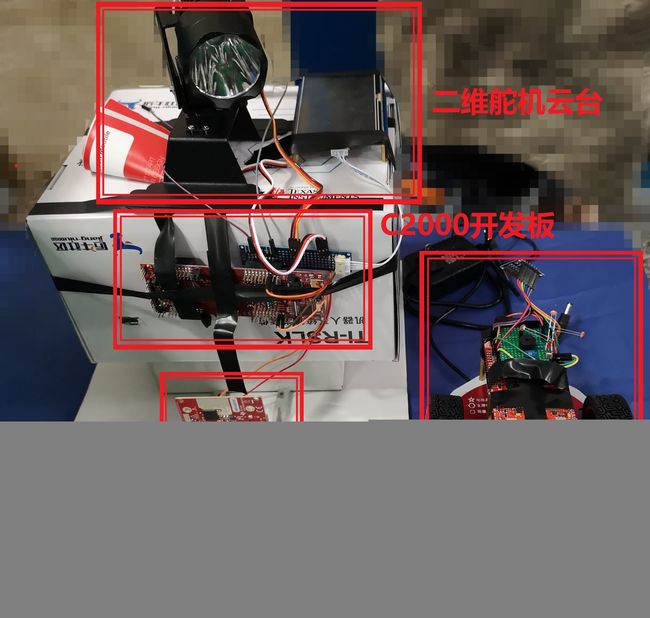
1.作品静态展示图
2.作品动态演示效果图
该视频是比赛制作过程中,请志愿者小姐姐帮忙拍摄的!(比赛不准带手机!)当时云台的识别和控制还有一些迟缓和不稳定。
2.电动小车系统设计
电动小车规定采用TI公司的TI-RSLK机器人开发套件,由TI公司现场提供。套件中包含小车主体、MSP432开发板、红外线性传感器。
(1).小车的采用的是红外线性传感器进行循迹(小车套件中包含的),资料中也提供了该传感器的使用参考代码。除此以外,循迹、运动、显示、调速等代码均需要自己编写。
(2).该小车配套采用TI公司的MSP432P401R launchpad进行编程控制。但比较尴尬的是,比赛之前我们组的三个人都没有想到要学msp432(因为有个大佬学长熟练掌握C2000,本以为只需他来做软件),因此只能在赛场上边学板子边进行小车的编程。(当然我也看到有队伍用Tmsp430的launchpad,只不过与小车的扩展板不配套,需要用杜邦线连接)
(3).由于暑假时候参加了全国大学生智能车比赛,对于循迹小车的控制上有比较多的经验。例如:转向上使用经典的PID算法对两个电机进行差速控制;循迹是通过多个红外传感器的状态组合后,与中线值进行比较,达到不同的转向角度判断。
(4).小车前端带有6个防碰撞开关,由于开发板集成的按键较少(2个),我将这六个碰撞开关也当作按键进行使用。这样就不需要外接键盘模块了。这六个开关在小车运行前主要用于速度的设定,通过添加状态标志位,也可将其切换成防碰撞模式。
(5).小车的显示屏使用的是IIC驱动的OLED。可直接将代码移植到MSP432上,需要调节的就只有延时函数。
(6).本赛题中唯一需要制作的硬件模块就是光照后的声光响应模块。主体就是一个蜂鸣器控制电路,光敏电阻ADC采集电路和一个LED灯控制电路。整体较为简单,制作难度低。(对于用光敏电阻进行有无光照判断时,有以下几点需要注意:1.建议采用多个光敏并联的方式,对应不同方位,增加识别的灵敏度;2.建议小车初始化时先对周围环境进行数据采集,然后根据采集的数据自动设定阈值,提高小车对环境的适应能力)
3.云台追踪系统设计
毫米波雷达模块采用的是TI公司提供的AWR1843,在比赛资料包中有相关的参考代码。云台则采用赛场提供的标准二维舵机云台。屏幕采用的是淘晶驰HMI串口屏(屏幕为自带,赛场不提供)。
(1). 该云台追踪系统由我们组的大佬学长单独编写完成。使用的是TI公司提供的LAUNCHXL-F28069M C2000 launchpad!
(2). 由于在该系统的编程设计上,我几乎没有参与,对其没有很深入的了解。因此我不做过多讲解。
(3). 据了解,该系统设计的难点主要在于:要对从毫米波雷达接收到的数据进行滤波处理,从而实现云台的稳定控制。
(4). 此处我仅提供学长的软件设计思路:

四.比赛总结
★1.本届比赛共决出6个全国一等奖(其中A题3个、C题2个、D题1个,B题由于难度大,作品完成度低,没有设置一等奖)、16个全国二等奖和26个全国三等奖。
★2.我们组获得了D题的全国二等奖,整体来说还算满意,但仍有一点点遗憾,毕竟离一等奖仅一步之遥。(PS:不得不说,D题第一名南邮的队伍比赛时在我们旁边,做的确实好!)
★3.比赛的两天一共睡了4个小时,这种短时间的作品设计十分考验参赛队员的专业综合能力以及临场应变能力。相比于传统的电赛,邀请赛赛题的难度相对低一点,但是由于没有老师的参与且不能上网查询资料,对参赛队员的知识储备有很高的要求,因此制作难度仍然很大。
五.下载链接
全国大学生电子设计竞赛——2020年“TI杯”模拟电子系统设计专题邀请赛(D题:目标跟踪系统设计报告)及四道赛题