apollo7.0------浅谈激光雷达运动补偿(一)
0. 简介:激光雷达帧率一般为10hz, 也就是100ms一帧,在车辆高速行驶或者转弯时,一帧点云中的点并不是同一个坐标系下获得的测量结果,对于同一个目标在三维点云中就会出现畸变,这时要想获得精确的测量,就需要对点云做运动补偿,或者说即便校正,将同一帧点云中所有点统一到某一个时间点下的坐标系中。
1. 举例:如果做低速移动平台,可能对即便矫正的需求没有那么高,毕竟效果不明显,还额外增加了耗时,但是对于高速运动的车辆,激光雷达的运动畸变对于感知和定位都有着非常大的影响,是非常基础的一个环节。简单举几个例子:
(1)在起伏路面,激光雷达点云在一帧点云的起始位置会产生多条线的交错,在点云中形成高度差,仿佛检测到了目标,极易造成地面物检。
待补图
(2)如果一个目标正处于一帧点云的0-360度交叉处,试想一下车辆是72km/h, 就是20m/s,100ms时间就差了2m, 感知目标检测极有可能将目标检测为两个,造成误检,随着目标的移动两个目标可能合二为一,对于追踪预测,速度估计的精准度都会产生一定的影响。
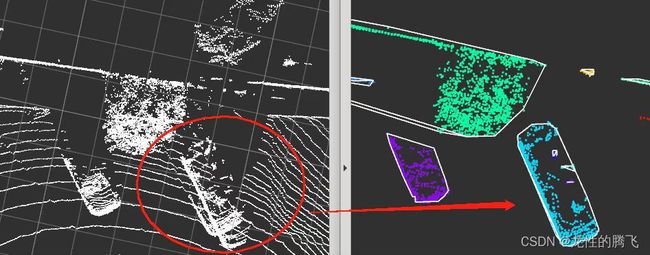
如上图左侧展示的为旋转过程中点云的畸变,可以看到红圈中车辆出现重影,右侧为运动补偿后车辆点云的轮廓,清晰完整。
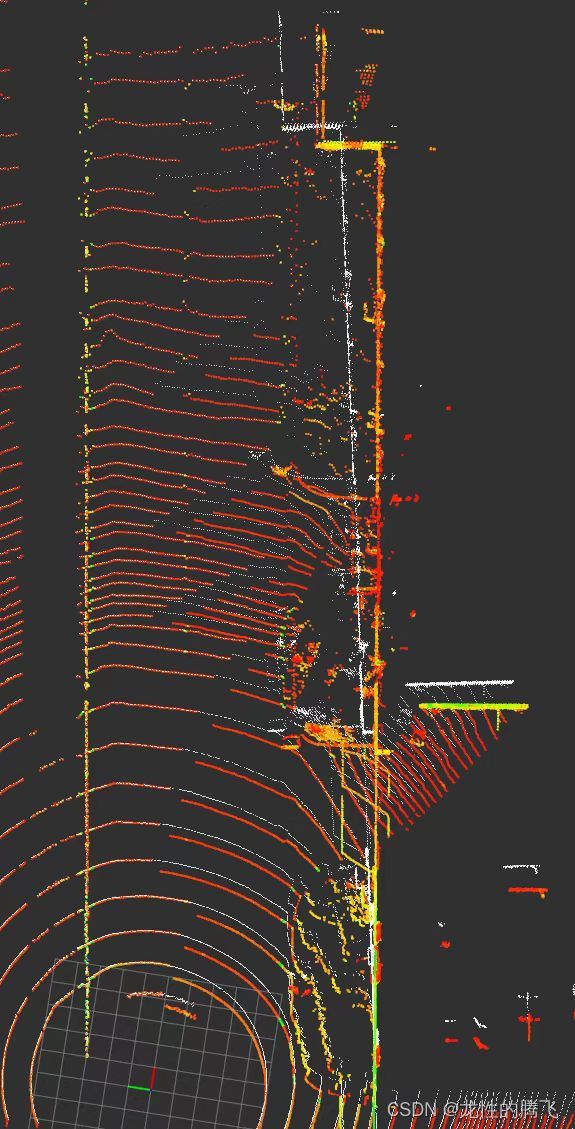
(3)对slam中建图定位更是需要运动补偿,没有运动补偿的点云在大规模建图极易跑偏,导致最后地图不在一个水平面上,点云的运动畸变相当于直接降低了激光测距的精度,从2-3cm精度下降到几十厘米甚至几米的误差,将直接导致定位精度无法提升,定位飘移问题。

如上图所示,白色为车辆在旋转过程中的原始点云,彩色为运动补偿后的点云,可以看到墙面发生了很严重的畸变,远处甚至到达了几米的差距,这种情况下没有运动补偿的情况下激光雷达定位效果肯定会变差。
2. apollo 程序
(1)程序在/apollo/modules/drivers/lidar/velodyne/compensator,apollo将运动补偿程序放到了lidar驱动的velodyne驱动下面,其他robosense和hesai的驱动也是用的这个模块,比apollo 3.0的代码结构更简洁了,3.0里面每个雷达驱动下面都有一个运动补偿程序,代码重复性很高。
(2)modules/drivers/lidar/velodyne/compensator/compensator_component.cc中Proc()函数就是主要函数,没什么东西,主要实现都在compensator.cc的
bool Compensator::MotionCompensation(
const std::shared_ptr& msg,
std::shared_ptr msg_compensated) {
// 1. 获取原始点云的最大最小时间,前提是你的点云是带时间戳的
// 注意这里是用的uint64_t,计数是纳秒1s = 1e9ns
// GetTimestampInterval 这里直接暴力循环获得最大最小时间
// 2. 根据一帧点云的起始时间查询坐标变换tf激光雷达在世界坐标系下的两个位姿
// QueryPoseAffineFromTF2 就是ros里面tf查询该的
// 3. 根据时间戳对位姿进行插值,以最大的时间戳为基准,计算每个点和最后一个点时间差,计算坐标变换关系, 将点转换到最大时间点的坐标系下
// MotionCompensation
} (3)核心就是这个位姿插值坐标变换,这里做了一个判断,旋转误差是否显著--"significant",激光雷达在70m测据精度2cm, 一个显著的旋转应该是
0.02 / 70 = 0.0003 rad.
不显著的仅作坐标平移即可。
(计算部分解释参考第二篇博客apollo7.0------浅谈激光雷达运动补偿(二)--计算解析_龙性的腾飞的博客-CSDN博客)
void Compensator::MotionCompensation(
const std::shared_ptr& msg,
std::shared_ptr msg_compensated, const uint64_t timestamp_min,
const uint64_t timestamp_max, const Eigen::Affine3d& pose_min_time,
const Eigen::Affine3d& pose_max_time) {
using std::abs;
using std::acos;
using std::sin;
Eigen::Vector3d translation =
pose_min_time.translation() - pose_max_time.translation();
Eigen::Quaterniond q_max(pose_max_time.linear());
Eigen::Quaterniond q_min(pose_min_time.linear());
Eigen::Quaterniond q1(q_max.conjugate() * q_min);
Eigen::Quaterniond q0(Eigen::Quaterniond::Identity());
q1.normalize();
translation = q_max.conjugate() * translation;
// int total = msg->width * msg->height;
double d = q0.dot(q1);
double abs_d = abs(d);
double f = 1.0 / static_cast(timestamp_max - timestamp_min);
// Threshold for a "significant" rotation from min_time to max_time:
// The LiDAR range accuracy is ~2 cm. Over 70 meters range, it means an angle
// of 0.02 / 70 =
// 0.0003 rad. So, we consider a rotation "significant" only if the scalar
// part of quaternion is
// less than cos(0.0003 / 2) = 1 - 1e-8.
if (abs_d < 1.0 - 1.0e-8) {
double theta = acos(abs_d);
double sin_theta = sin(theta);
double c1_sign = (d > 0) ? 1 : -1;
for (const auto& point : msg->point()) {
float x_scalar = point.x();
if (std::isnan(x_scalar)) {
// if (config_.organized()) {
auto* point_new = msg_compensated->add_point();
point_new->CopyFrom(point);
// } else {
// AERROR << "nan point do not need motion compensation";
// }
continue;
}
float y_scalar = point.y();
float z_scalar = point.z();
Eigen::Vector3d p(x_scalar, y_scalar, z_scalar);
uint64_t tp = point.timestamp();
double t = static_cast(timestamp_max - tp) * f;
Eigen::Translation3d ti(t * translation);
double c0 = sin((1 - t) * theta) / sin_theta;
double c1 = sin(t * theta) / sin_theta * c1_sign;
Eigen::Quaterniond qi(c0 * q0.coeffs() + c1 * q1.coeffs());
Eigen::Affine3d trans = ti * qi;
p = trans * p;
auto* point_new = msg_compensated->add_point();
point_new->set_intensity(point.intensity());
point_new->set_timestamp(point.timestamp());
point_new->set_x(static_cast(p.x()));
point_new->set_y(static_cast(p.y()));
point_new->set_z(static_cast(p.z()));
}
return;
}
// Not a "significant" rotation. Do translation only.
for (auto& point : msg->point()) {
float x_scalar = point.x();
if (std::isnan(x_scalar)) {
AERROR << "nan point do not need motion compensation";
continue;
}
float y_scalar = point.y();
float z_scalar = point.z();
Eigen::Vector3d p(x_scalar, y_scalar, z_scalar);
uint64_t tp = point.timestamp();
double t = static_cast(timestamp_max - tp) * f;
Eigen::Translation3d ti(t * translation);
p = ti * p;
auto* point_new = msg_compensated->add_point();
point_new->set_intensity(point.intensity());
point_new->set_timestamp(point.timestamp());
point_new->set_x(static_cast(p.x()));
point_new->set_y(static_cast(p.y()));
point_new->set_z(static_cast(p.z()));
}
} 在直行路上运动补偿效果如下:白色为原始点云,车辆向前行驶,激光雷达顺时针旋转