【OpenCV--角点特征】
目录
一、什么是角点
二、Harris角点检测
1.原理:
2.角点检测的实现:
三、Shi-Tomasi角点检测
1.原理:
2.实现:
一、什么是角点
1.举例:


对于A-F六个小图找到原始图像中的位置:
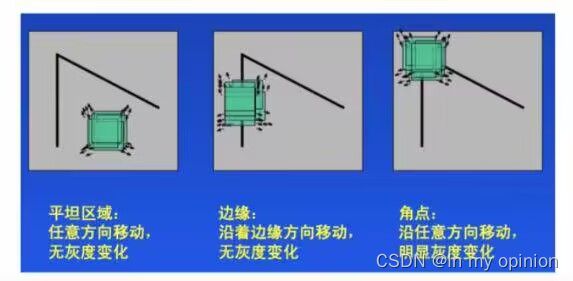
A和B是平面,图像中很多地方存在,难以准确找到
C和D是边缘,可以近似确定其位置
E和F是角点,可以迅速确定位置
2.角点对图像理解、分析起着重要作用,在三维场景重建运动估计、目标跟踪、目标识别、图像配准与匹配起着重要作用,现实世界里,角点对应物体拐角,道路十字路口、丁字路口
二、Harris角点检测
1.原理:
Harris角点检测是通过图像的局部小窗口观察图像,角点的特征是窗口沿着任意方向移动都会导致图像灰度的明显变化
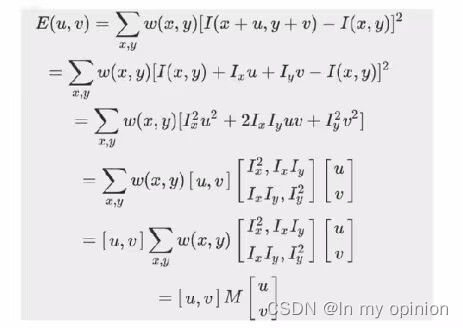
转化为数学思想,将局部窗口向各个方向移动(u,v)并计算所有灰度差异总和,没有变化或比较小为平坦区域,表达式如下:E(u,v)= ![]()
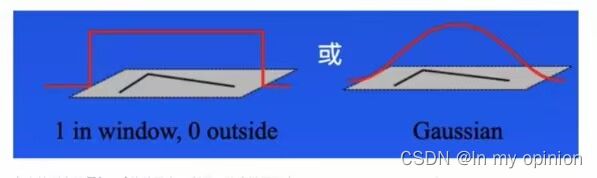
其中I(x, y)是局部窗口的图像灰度,I(x + u,y + v)是平移后的图像灰度,w(x, y)是窗口函数,该可以是矩形窗口,也可以是对每一个像素赋予不同权重的高斯窗口,如下所示:
利用泰勒级数进行展开I(x+u,y+v)=I(x,y)+![]() +
+![]()
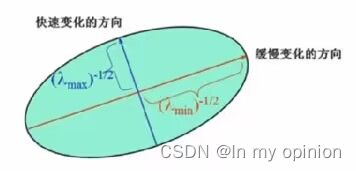
M矩阵决定了E(x,y)的值,M是Ix和Iy的二次项函数,可以表示成椭圆的形状,椭圆的长短半轴由M的特征值入![]() 和
和![]() 决定,方向由特征矢量决定
决定,方向由特征矢量决定
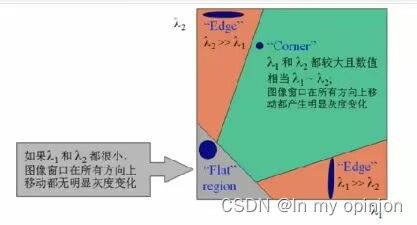
椭圆函数特征值与图像直线、角点、平面之间的关系:
1>图像中的直线:一个特征值大,另一个特征值小,λ1>>λ2或λ2>>λ1,椭圆函数值在某一方向上大,在其他方向上小
2>图像中的平面:两个特征值都小,且近似相等,椭圆函数数值在各个方向上都小。
3>图像中的角点:两个特征值都大,且近以相等,椭圆函数在所有方向都增大
Harris角点计算方法是通过计算一个角点响应值R来判断
R = detM -
detM为矩阵M的行列式; traceM为矩阵M的迹; a为常数取值范围为0.04~0.06detM=
,traceM=


2.角点检测的实现:
dst=cv.cornerHarris(src,blockSize,ksize,k)
参数:
src:数据类型为32的输入图像
blockSize:角点检测中需要考虑的邻域大小
k:角点检测中的自由参数,取值[0.04,0.06]
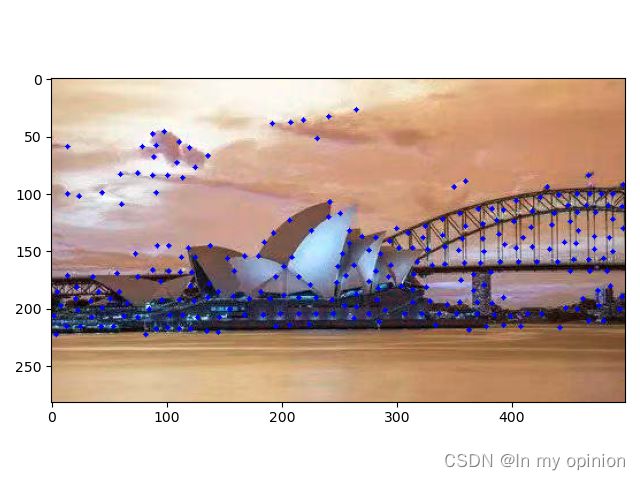
例:
import numpy as np
import matplotlib.pyplot as plt
import cv2 as cv
img=cv.imread('building.jpg')
gray=cv.cvtColor(img,cv.COLOR_BGR2GRAY)
#plt.imshow(img,cmap=plt.cm.gray)
#plt.show()
gray=np.float32(gray)
dst=cv.cornerHarris(gray,2,3,0.05)
img[dst>0.001*dst.max()]=[0,0,255]
plt.figure(figsize=(10,8),dpi=100)
plt.imshow(img[:,:,::])
plt.show()
三、Shi-Tomasi角点检测
1.原理:
Shi-Tomasi算法一般会比Harris算法得到更好的角点,改进的方法是,若矩阵M的两个特征值中较小的一个大于阈值,则认为他是角点,即,R=min(![]() ,
,![]() ),从下图中可以看出
),从下图中可以看出![]() 和
和![]() 都大于最小值,被认为是角点
都大于最小值,被认为是角点

2.实现:
corners=cv.goodFeaturesToTrack(image,maxCorners,qualityLevel,minDistance)
参数:
maxCorners:获取角点数的数目
quulityLevel:该参数指出最低可接受的角点质量水平,在0-1之间
minDistance:角点之间最小的欧氏距离,避免得到相邻特征点
import numpy as np
import matplotlib.pyplot as plt
import cv2 as cv
img=cv.imread('building.jpg')
gray=cv.cvtColor(img,cv.COLOR_BGR2GRAY)
corners=cv.goodFeaturesToTrack(gray,1000,0.01,10)
for i in corners:
x,y=i.ravel()
cv.circle(img,(int(x),int(y)),2,(0,0,255),-1)
plt.imshow(img[:,:,::])
plt.show()