基于雷达-非接触式传感器的高次谐波峰值选择方法的准确心率和呼吸率检测
1. 介绍
心率和呼吸率等生命体征是健康监测和医疗应用中最重要的生理信号之一。脉冲无线电 (IR) 超宽带 (UWB) 雷达成为非接触式生命体征检测中必不可少的传感器之一。心脏脉搏波很容易被噪声和呼吸活动破坏,因为与呼吸信号及其谐波相比,心跳信号的功率较小。在本文中,开发了一种用于 UWB 雷达系统的信号处理技术来检测心率和呼吸率。信号处理有四个主要阶段: (1) 杂波去除以减少来自环境的静态随机噪声;(2)独立成分分析(ICA)做降维去噪;(3) 使用低通和高通滤波器消除带外噪声;(4) 改进的协方差法进行谱估计。此外,心率的高次谐波用于估计心率并最大限度地减少呼吸干扰。本文中的实验包含不同的场景,包括床的角度、身体的位置,以及来自靠近床和远离床的访客的干扰。结果与心电图传感器和呼吸带进行了比较。所提出算法的心率结果的平均平均绝对误差 (MAE) 为 1.32。

图 1. 心率雷达监测系统概览。
CW 多普勒雷达通常用于生命体征检测。调频连续波 (FMCW) 雷达也用于心率和呼吸率监测。此外,生物医学多输入多输出 (MIMO) 雷达已用于生命体征检测和人体定位 。与 CW 雷达相比,FMCW 雷达可以提供更多的信息,例如距离、速度,甚至角度估计。由于 FMCW 雷达具有范围剖面,因此可以检测多个对象或人员。另一种用于生命体征监测的常见雷达是 IR-UWB。它还可以提供一系列信息。该研究在使用 IR-UWB 雷达监测痴呆症患者的呼吸。IR-UWB 雷达也已用于汽车应用。研究表明,与 FMCW 雷达相比,IR-UWB 雷达在大多数场景下具有更高的信噪比、更简单的硬件结构和更好的准确率。本研究使用了 IR-UWB 雷达,因为它提供了更高的 SNR 和精度。
基于雷达的心率检测有不同的信号处理算法。盲源分离 (BSS) 方法可以从噪声和有用信号的混合中提取和恢复信号。它已被用作生命体征雷达系统中的降维和信号分离技术。M. Le 提出了一种基于特征值的方法来提取和重建呼吸和心跳信号。中应用了主成分分析 (PCA)来消除静态噪声并恢复生命信号 。中的两个 CW 雷达系统应用 ICA 来衰减心跳信号恢复的呼吸效应。在 ICA-JADE和到达方向技术被用来获得多人的呼吸率。文献中主要的信号处理技术如 PCA、ICA 和基于特征值的方法都属于 BSS 方法。
考虑到 IR-UWB 雷达在提供距离信息和更高 SNR 方面的优势,与 FMCW 或 CW 雷达相比,本研究开发了一种基于 IR-UWB 技术的心率和呼吸率检测信号处理方法。ICA 被用作信号处理中的 BSS 方法,用于降维、消除噪声和信号分离。此外,应用了一种基于高次谐波峰值选择的信号处理新方法,成功实现了高精度的心率。与现有研究相比,该工作为信号分离提供了更简单的计算,准确的心率检测,并且避免了心率检测的呼吸谐波干扰。本文结构如下:第 2 节导出生命信号建模。第 3 节讨论了本文中的信号处理算法。第 4 节介绍了实验的结果。第 5 节介绍了结论。
2. 雷达信号建模
本节的内容是关于对用于生命体征检测的 IR-UWB 雷达信号进行建模。在 中,作者详细推导出了 IR-UWB 雷达信号的数学方程。为了模拟 IR-UWB 雷达中的生命体征方程,作者假设胸部运动和心跳是周期性正弦曲线。UWB 雷达在短时间内发射脉冲。根据到达时间(TOA),接收到的脉冲代表不同距离的信号。然后,一个通道的接收信号可以写为![]()
其中t是沿测量间隔的慢时间;d0是雷达到人的距离;dH和dr分别是心跳和呼吸的幅度。这FH和Fr参数分别是心跳和呼吸的频率,
接收到的脉冲信号可以表示为多径分量加上来自身体的反射信号,如下所示:

在哪里一个_是目标距离处的脉冲幅度,τ是相关的到达时间d(吨),p ( t )在通带频率中接收到脉冲,一种一世是多径分量的幅度和τ一世是多径信号的延迟。时间τ沿着范围是快速时间,所有范围的每个样本帧之间的时间是慢时间。由于 TOA 是脉冲发送和接收的时间,因此来自人的 TOA 可以写为
![]()
在哪里τ0是该人的延迟,并且τr和τH分别是胸部运动和心跳的位移 。
在( 3 )中,雷达信号模型的两项分别对应多径分量和生命信号。多径分量源自静态环境,这会导致接收信号中的直流偏移。为了提取心跳和呼吸信号并补偿 DC 偏移,将接收到的信号减去快速通道的平均值,如 ( 4 )
![]()
3. 信号处理
图 2显示了本研究中建议的信号处理方法的框图,用于使用 IR-UWB 雷达检测心率和呼吸率。算法中的输入信号是一个快时-慢时矩阵,是来自 IR-UWB 雷达的原始信号。
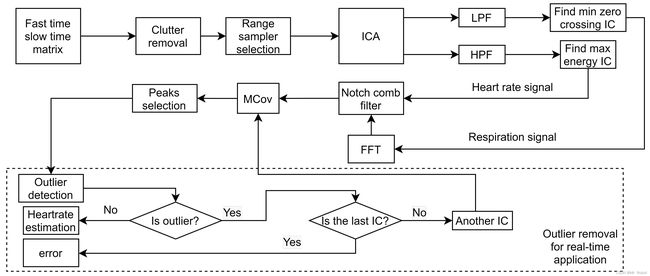
图 2. 信号处理算法的框图
3.1 杂波减少
将杂波减少技术应用于原始信号以消除背景噪声。假设一个人保持静止,杂波将是静止的噪音;因此,它可以通过背景减法方法去除。假设r ( n )是一个范围索引的接收信号;那么,去杂波的方法可以写成 ( 5 )
![]()
b( n - 1 )是背景杂波估计量。静止背景杂波定义为先前样本的平均值 ( 6 ) 
3.2. 范围选择
下一步是选择目标所在的距离范围。假设雷达探测范围内只有一个人,该人保持静止。因此,呼吸运动将在接收到的信号中具有最大的能量。可以通过选择最大方差以及包含呼吸信号的范围采样器的慢时间来进行范围选择。由于呼吸信号可能不包含心跳信号,因此保持附近的范围采样器覆盖心脏活动非常重要。在本实验中,雷达传感器的感兴趣范围设置为 60 厘米,以覆盖从胸部到身体后部的范围。
3.3. 独立成分分析
此步骤的目的是从混合信号中恢复心率和呼吸信号,并使用 BSS 方法降低噪声。每个范围的观察(接收到的信号)可以被认为是各种信号的线性组合,例如心脏信号、胸部运动和噪声信号。因此,每个范围的观察可以写成如下:
 在哪里X1,X2…Xn是每个范围采样器索引中的观测信号;s1,s2…sn是原始的未知信号,并且一种我j是每个未知信号的常数系数(权重)。等式 ( 7 ) 可以写成矩阵形式为 ( 8 )
在哪里X1,X2…Xn是每个范围采样器索引中的观测信号;s1,s2…sn是原始的未知信号,并且一种我j是每个未知信号的常数系数(权重)。等式 ( 7 ) 可以写成矩阵形式为 ( 8 )
![]()

假设信号s一世是统计独立的并且具有非高斯分布,并且观察是一个随机向量X. 恢复生命信号s一世, 矩阵一种应该先估计。如果W被定义为的逆矩阵一种,则独立分量 (IC) s可以计算为 ( 10 )
![]()
将 y 定义为 IC,其中列向量w是倒数的一行一种, y可以计算为 ( 11 )
![]()
z=ATw , 那么 ( 11 ) 可以写成 ( 12 )
![]() 由 ( 12 ) 可知,y是s一世,其中权重是向量z。由于中心极限定理告诉独立随机变量的总和将变得比任何一个原始变量都更具有高斯性,因此最小高斯性将发生在z吨s等于IC之一s一世,并且权重z只有一个非零值。因此,w 可以通过最大化非高斯性来估计wTX。
由 ( 12 ) 可知,y是s一世,其中权重是向量z。由于中心极限定理告诉独立随机变量的总和将变得比任何一个原始变量都更具有高斯性,因此最小高斯性将发生在z吨s等于IC之一s一世,并且权重z只有一个非零值。因此,w 可以通过最大化非高斯性来估计wTX。
ICA有不同的算法。本文中使用的算法是 FastICA,因为它计算量低,并且使用了鲁棒的非线性算法 。ICA的第一步是对数据进行居中,也就是x减去自身的均值。这可以简化ICA算法中的进一步处理。
![]()
数据居中后,下一步是白化过程,这降低了 FastICA 的计算复杂度。这个过程是使信号不相关并标准化方差。白化后协方差矩阵会变成单位矩阵。白化过程是通过特征值分解(EVD)来执行的。的协方差矩阵的 EVDX^计算为
![]()
![]()
变换矩阵。
FastICA 算法是使用定点算法来解决多维信号问题。FastICA 的过程被描述为算法 1

3.4. 修正协方差法
所有 IC 具有相同的能量,因为 IC 的方差是单位。为了获得呼吸速率,使用低通滤波器 (LPF) 过滤 IC。由于健康人休息时的呼吸频率在 12 bpm 到 20 bpm [ 36 ] 之间,LPF 的截止频率选择为 0.8 Hz (48 bpm)。考虑到呼吸信号与心率信号相比过零较少,比较了LPF后的IC,选择过零最少的IC进行呼吸检测。FFT应用于所选IC,将具有最大功率的频率分量视为呼吸率。
对于心率估计,IC 分别通过高通滤波器 (HPF),如图 2所示。HPF 的截止频率选择为 1.66 Hz,以消除与呼吸相关的频率分量及其最强谐波。在心率谐波相关频率范围内,心率谐波的能量大于呼吸谐波的能量[ 8 ];因此,比较了HPF后IC的能量,选择能量最大的IC作为心率信号。
测得的呼吸速率用作陷波梳状滤波器的参数,以减少呼吸谐波对心率估计的影响。经过陷波滤波后,采用修正协方差法作为谱估计。修正协方差是一种自回归 (AR) 谱估计方法。改进的协方差方法的好处是它可以产生稳定的频谱估计,同时最小化前向和后向预测误差。AR 系数可以通过求解 ( 17 ) 来计算


在 ( 17 ) 和 ( 18 ) 中,rX是x的自相关序列和一种p是极点系数。AR 过程的功率谱密度 (PSD) 估计如 ( 19 )

在( 19 )中,b是AR模型中的零系数。
3.5. 峰值选择算法
由于频域中的心率容易受到呼吸及其谐波的污染,使用修正协方差法很难得到准确的心率。因此,本研究提出了一种基于心率高次谐波的峰值选择方法。
首先,表示数组P有元素p1,p2…pn,它们都是高于 100 bpm 的峰值。
然后,算法找到所有峰值p一世在 100 bpm 和 400 bpm 之间,并将所有相关频率放在一个向量中,如 ( 21 )。
![]()
下一步是找到心率的两个初始值,如 ( 22 )。
![]()
如果两者之间的差异p1和p2低于 100 bpm,p1和p2被认为是心率的前两个谐波,分别除以 2 和 3,作为心率初始假设HrG你是1 _ _和HrG你是2 _ _. 如果两者之间的差异p1和p2大于或等于 100 bpm,p1被认为是心率的初始基本值HrG你是1 _ _, 和p2假设为二次谐波并除以 2 得到HrG你是2 _ _.
接下来,向量P除以HrG你是1 _ _和HrG你是2 _ _分别四舍五入得到整数倍数组,如 ( 23 ) 和 ( 24 )。


如果计算的误差高于阈值 (6 bpm),则将相应的高频峰值视为噪声。根据其在心率估计数组中的索引删除估计的心率和错误。
最后,剩余误差的平均值错误r o r 1 _和错误r o r 2 _计算,并选择到最小平均值对应的估计心率数组,Hrs l t. 最后的心率Hre s t将被计算为的平均值Hrs l t, 如 ( 29 )

3.6. 实时测量中的异常值去除
所提出的算法可以用于实时应用。每个读数的窗口长度被认为是 35 秒,读数每 5 秒重复一次。因此,程序在传感器开始第一次读数后等待 35 秒。算法 2 显示了异常值去除的过程。心率的前五个估计值存储在先进先出 (FIFO) 缓冲区中。从第六次测量开始,程序将新的心率估计与 FIFO 缓冲区的中值进行比较。

假设 FIFO 缓冲区的中值与最新读数之间的差异小于阈值(中值的 10%)。在这种情况下,新结果将被视为估计的心率并更新到 FIFO 缓冲区。否则,程序将使用另一个 IC 重复峰值选择算法并获得结果。它将继续更改 IC,直到最后估计的心率在阈值内。如果没有一个 IC 给出正确的估计值,则程序会丢弃估计值。
4. 实验结果与讨论
4.1 实验设置
本文中使用的 UWB 雷达是 Xethru X4M200 [ 38 , 39 ]。它可以工作在低频段和高频段。检测范围也可配置为 0.4 m 至 5 m,分辨率为 0.0514 m [ 38 , 39 ]。表 1说明了用于本研究的 Xethru 雷达装置的配置。雷达传感器通过 MATLAB API 接口连接到笔记本电脑以收集原始数据。同时,心电图传感器和呼吸带连接到另一台笔记本电脑作为参考信号。

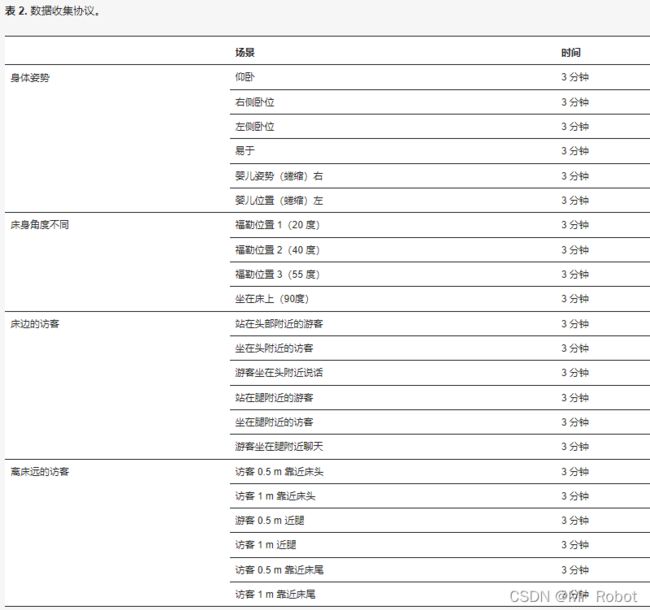
为了评估心率和呼吸率检测算法的可靠性,我们进行了数据收集,涵盖了人在床上的不同场景。表 2中解释了建议的实验方案的详细信息。收集了五名健康参与者的数据。他们都没有报告任何心血管或呼吸系统疾病。图 3显示了实验期间设备的设置。Xethru 安装在床上方 1 m 处,指向对象的胸部。
图 3. 设备设置:雷达安装在床上方 1 m 处。两台笔记本电脑用于雷达传感器数据和参考信号记录。
4.2. 结果与讨论
图 4a显示了原始信号的快时和慢时,图4b 显示了基于背景减法的杂波减少后的结果。在图4b 中,最大能量约为 80 cm。

图 5显示了 ICA 和参考信号之后的快时 - 慢时矩阵。很明显,在提取生命信号后,IC1 是心跳信号,而 IC2 是呼吸过程中的胸腔运动。图 6说明了图 5中 IC2用于呼吸率检测的 FFT 结果。FFT的峰值表示为呼吸率值,精度很高。

图 5. ECG、呼吸信号和 IC。
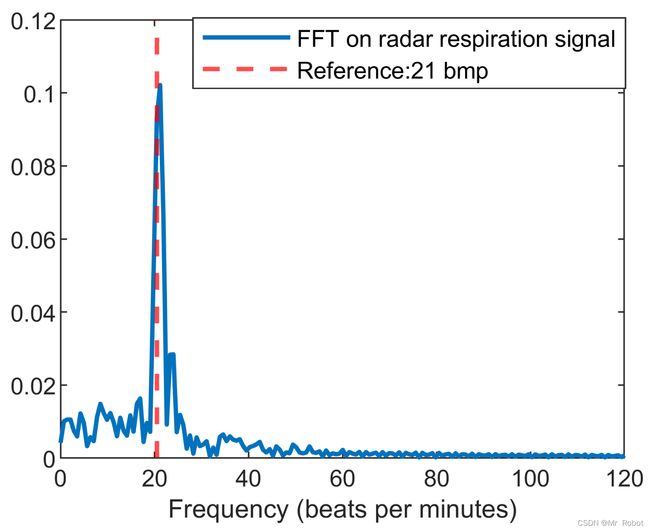
图 7清楚地表明,通过 ICA 提取心跳信号后,与经过高通滤波后的导出心率相比,PSD 的峰值更接近参考心率。在大多数情况下,使用 ICA 和简单的峰值检测算法来找到与正确心率对应的信号的准确峰值是不切实际的。图 8说明了基本心率被呼吸谐波破坏的情况示例。它显示所有 IC 的最高峰值约为 60 bpm,而参考心率值约为 79 bpm。此外,心率的谐波几乎与参考的整数倍对齐。这就是所提出的峰值选择算法总是使用高次谐波来提取心率的原因。

图 7. ICA 生命体征提取前和生命体征提取后修正协方差法的结果。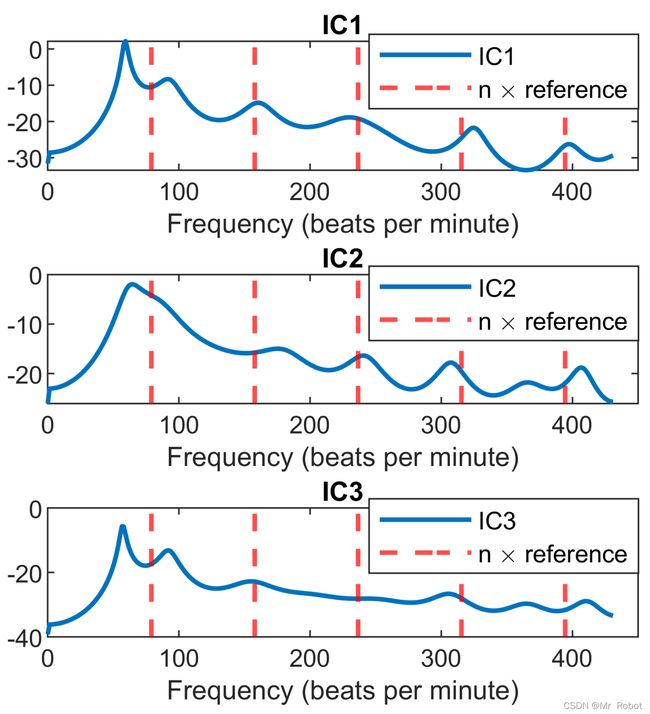
图 8. 所有 IC 的修改协方差方法的结果。参考心率为 79 bpm。红色虚线是参考心率的整数倍。
图 9显示了使用不同算法提取的心率和来自 ECG 的参考心率值。每个雷达和心电图信号读数的窗口长度为 35 秒,读数每 5 秒重复一次。从图中可以看出,FFT 和修正协方差法受呼吸谐波的影响,不能得到准确的结果。与其他方法相比,所提出的峰值检测算法具有更高的准确性和稳定性。
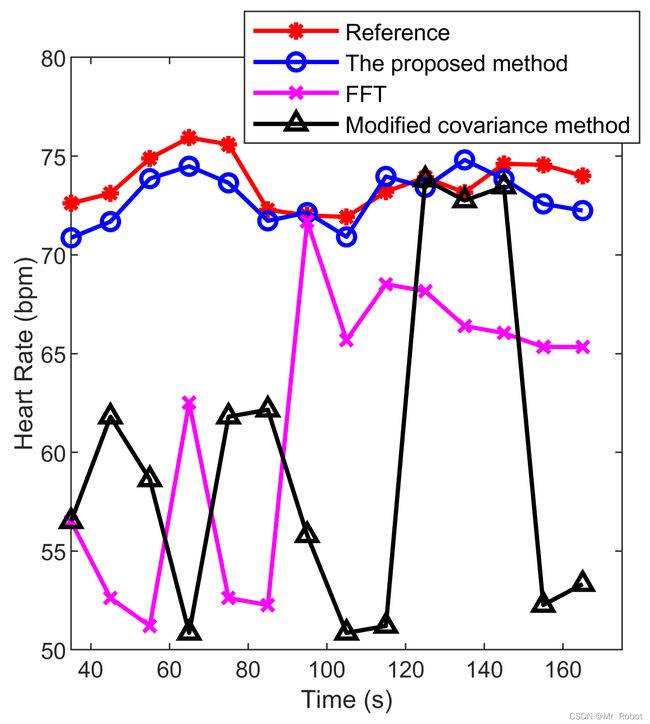
图 9. 不同方法的心率估计,窗口长度为 35 秒。红星为参考心率,粉红色十字为高通滤波后的FFT,黑色三角为高通滤波后的修正协方差法,蓝色圆圈为提出的方法。
表 3显示了在前面提到的场景中,一名受试者的数据的估计心率和呼吸率。此表中的误差是使用参考地面实况与测量值之间差异的绝对值计算的。它表明呼吸信号的平均误差为 0.82 bpm,最大误差为 2 bpm。相比之下,对于心率估计,平均误差为 1.45 bpm。Fowler 的位置 2 和坐在受试者头部附近的访客的最大误差为 4 bpm。表 3还表明,不同的身体位置和距离受试者 0.5 m 或 1 m 的访客将给出更准确的心率和呼吸率估计结果。
表 3 不同场景下的心率和呼吸率结果。该表中每个实验的数据长度为 35 秒。

心率和呼吸率的结果如表4所示。将参与实验的所有五名受试者的平均绝对误差 (MAE) 和均方根误差 (RMSE) 与其相关参考信号进行比较。很明显,表 4中呼吸频率的平均 MAE 为 0.65,心率估计的平均 MAE 为 1.32. 心率的最大 MAE 发生在左侧卧位和访客坐在受试者腿附近说话的情况下。这是因为当雷达信号从右臂穿透到对象心脏时,接收到的信号会很弱,而访客说话会干扰从雷达传感器接收到的心跳信号。此外,当访客距离床上的对象0.5 m和1 m时,心率检测将是准确的。表 5显示了来自不同研究的设备和信号处理方法与本工作中提出的方法之间的比较。



在方程式中是的一世是测量和X一世是参考信号的ground truth。
5 结论
在本文中,我们提出了一种新的基于 ICA 和谐波峰值选择方法的 IR-UWB 雷达传感器的心率和呼吸率估计信号处理算法。建议的算法使用 ICA 来提取清晰的脉搏波和呼吸信号。然后,使用改进的协方差方法得到滤波后的频域PSD。由于基本的心跳信号很容易被呼吸信号及其谐波破坏,因此引入了基于心脏波形的高次谐波的峰值选择来估计心率。异常值检测算法用于进一步提高实时应用中结果的准确性,因为它能够在检测到的心率中存在异常值时考虑其他 IC。在本实验中,对五名不同情况的受试者进行了测量。结果显示,呼吸的 MAE 为 0.65,心率检测的 MAE 为 1.32。
所提出的算法有一些限制。由于心率谐波的能量较低,因此信号容易受到频率接近心率的环境振动噪声的干扰。未来,我们的工作将集中在身体运动、说话和行走场景等嘈杂环境中的多人检测、定位、心率、呼吸率检测。