【老生谈算法】matlab实现磁悬浮系统建模及其PID控制器设计——磁悬浮
磁悬浮系统建模及其PID控制器设计MATLAB
1、算法详解:
摘 要
磁悬浮技术具有无摩擦、无磨损、无需润滑以及寿命较长等一系列优点,在能源、交通、航空航天、机械工业和生命科学等高科技领域有着广泛的应用背景。
随着磁悬浮技术的广泛应用,对磁悬浮系统的控制已成为首要问题。本设计以PID控制为原理,设计出PID控制器对磁悬浮系统进行控制。
在分析磁悬浮系统构成及工作原理的基础上,建立磁悬浮控制系统的数学模型,并以此为研究对象,设计了PID控制器,确定控制方案,运用MATLAB软件进行仿真,得出较好的控制参数,并对磁悬浮控制系统进行实时控制,验证控制参数。最后,本设计对以后研究工作的重点进行了思考,提出了自己的见解。
PID控制器自产生以来,一直是工业生产过程中应用最广、也是最成熟的控制器。目前大多数工业控制器都是PID控制器或其改进型。尽管在控制领域,各种新型控制器不断涌现,但PID控制器还是以其结构简单、易实现、鲁棒性强等优点,处于主导地位。
关键字:磁悬浮系统;PID控制器;MATLAB仿真
1 根据磁悬浮系统的运动方程搭建被控对象在Simulink环境下的仿真模型;
2 结合单位反馈控制系统的控制原理,为被控对象设计PID控制器。
仿真参数:第1 组
3 分析综述比例P、积分I、微分D三个调节参数对系统控制性能的影响。
M=0.13;
X=3e-3;
I=0.752;
K=1.28e-4;
X0=4.36e-3;
R=9.5;
L=0.3;
Kx0=2KII/(X+X0)^3;
Ki=2K*I/(X+X0)^2;
P=8000;
I=9000;
D=900;
M=0.13;
X=3e-3;
I=0.752;
K=1.28e-4;
X0=4.36e-3;
R=9.5;
L=0.3;
Kx0=2KII/(X+X0)^3;
Ki=2K*I/(X+X0)^2;
P=5000;
I=10000;
D=900;
1 绪论
1.1 磁悬浮技术综述
磁悬浮技术属于自动控制技术,它是随着控制技术的发展而建立起来的。磁悬浮的作用是利用磁场力使某一物体沿着或绕着某一基准框架的一轴或几轴保持固定位置。由于悬浮体和支撑之间没有任何接触,克服了由摩擦带来的能量消耗和速度限制,具有寿命长、能耗低、无污染、无噪声、不受任何速度限制、安全可靠等优点,因此目前世界各国已广泛开展磁悬浮控制系统的研究。随着控制理论的不断完善和发展,采用先进的控制方法对磁悬浮系统进行的控制和设计,使系统具有更好的鲁棒性。随着电子技术的发展,特别是电子计算机的发展,带来了磁悬浮控制系统向智能化方向的快速发展。
目前,关于磁悬浮技术的研究与开发在国内外都处于快速发展之中。磁悬浮技术从原理上来说不难以理解,但是真正将其产业化却是近几年才开始的。
1.2 磁悬浮技术的应用及展望
20世纪60年代,世界上出现了3个载人的气垫车试验系统,它是最早对磁悬浮列车进行研究的系统。随着技术的发展,特别是固体电子学的出现,使原来十分庞大的控制设备变得十分轻巧,这就给磁悬浮列车技术提供了实现的可能。1969年,德国牵引机车公司的马法伊研制出小型磁悬浮列车模型,以后命名为TR01型,该车在1km轨道上的时速达165km,这是磁悬浮列车发展的第一个里程碑。在制造磁悬浮列车的角逐中,日本和德国是两大竞争对手。1994年2月24 日,日本的电动悬浮式磁悬浮列车,在宫崎一段74km长的试验线上,创造了时速431km的日本最高纪录。1999年4月,日本研制的超导磁悬浮列车在试验线上达到时速552km。德国经过近20年的努力,技术上已趋于成熟,已具有建造运用的水平。原计划在汉堡和柏林之间修建第一条时速为400km的磁悬浮铁路,总长度为248km,预计2003年正式投入营运。但由于资金计划问题,2002年宣布停止了这一计划。
我国对磁悬浮列车的研究工作起步较晚,1989年3月,国防科技大学研制出我国第一台磁悬浮试验样车。1995年,我国第一条磁悬浮列车实验线在西南交通大学建成,并且成功进行了稳定悬浮、导向、驱动控制和载人等时速为300km的试验。西南交通大学这条试验线的建成,标志我国已经掌握了制造磁悬浮列车的技术。然而,2001年3月上海13.8km的磁悬浮列车开始营运,标志着我国成为世界上第一个具有磁悬浮运营铁路的国家。
2 磁悬浮系统的结构
2.1 系统组成
本设计所使用的磁悬浮实验装置系统,是由固高科技有限公司所生产的磁悬浮实验装置GML1001。此磁悬浮实验装置由LED光源、电磁铁、光电传感器、功放模块、模拟量控制模块、数据采集卡和被控对象(钢球)等元器件组成,其结构简单,实验控制效果直观明了,极富有趣味性。它是一个典型的吸浮式悬浮系统。此系统可以分为磁悬浮实验本体、电控箱及由数据采集卡和普通PC机组成的控制平台等三大部分。系统组成主要由所需设计的PID控制器,以电磁铁为执行器,小球位置传感器和被控对象钢球组成,系统框图如图1所示。
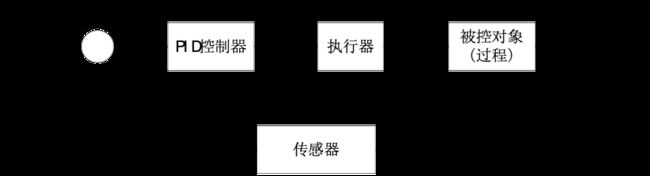
图1 磁悬浮控制系统框图
2.2 磁悬浮实验本体
电磁铁绕组中通以一定的电流或者加上一定的电压会产生电磁力,控制电磁铁绕组中的电流或者绕组两端的电压,使之产生的电磁力与钢球的重量相平衡,钢球就可以悬浮在空中而处于平衡状态。但是这种平衡状态是一种不稳定平衡。此系统是一开环不稳定系统。主要有以下几个部分组成:箱体、电磁铁、传感器。
2.3 磁悬浮实验电控箱
电控箱内安装有如下主要部件:直流线性电源、传感器后处理模块、电磁铁驱动
模块、空气开关、接触器、开关、指示灯等电气元件。
2.4 磁悬浮实验平台
与IBM PC/AT机兼容的PC机,带PCI总线插槽,PCI1711数据采集卡及其驱动程序演示实验软件。
磁悬浮系统是一个典型的非线性开环不稳定系统。电磁铁绕组中通以一定的电流或者加上一定的电压会产生电磁力,控制电磁铁绕组中的电流或电压,使之产生的电磁力与钢球的重力相平衡,钢球就可以悬浮在空中而处于平衡状态。但是这种平衡状态是一种开环不稳定的平衡,这是由于电磁铁与钢球之间的电磁力大小与它们之间的距离的平方成反比,只要平衡状态稍微受到扰动(如:加在电磁铁线圈上的电压产生脉动、周围的震动等),就会导致钢球掉下来或被电磁铁吸住,不能稳定悬浮,因此必须对系统实现闭环控制。由LED光源和传感器组成的测量装置检测钢球与电磁铁之间的距离变化,当钢球受到扰动下降,钢球与电磁铁之间的距离增大,传感器感受到光强的变化而产生相应的变化信号,经(数字或模拟)控制器调节、功率放大器放大处理后,使电磁铁控制绕组中的控制电流相应增大,电磁力增大,钢球被吸回平衡位置。
3 磁悬浮系统的建模
3.1 磁悬浮系统的工作原理
磁悬浮控制系统由铁心、线圈、光位移传感器、控制器、功率放大器和被控对象(钢球)等元器件组成。它是一个典型的吸浮式悬浮系统。系统开环结构如图4所示。
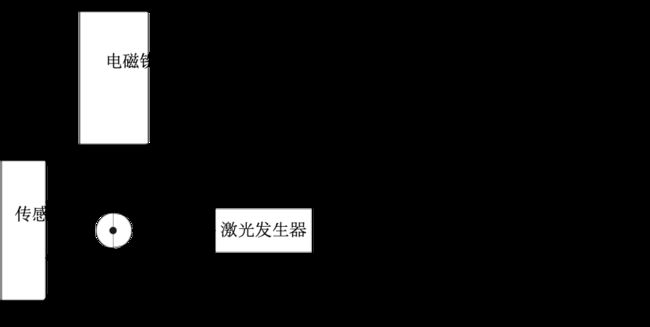
图2系统开环结构图
电磁铁绕组中通以一定的电流会产生电磁力,控制电磁铁绕组中的电流,使之产生的电磁力与钢球的重力相平衡,钢球就可以悬浮于空中而处于平衡状态。但是这种平衡是一种不稳定平衡,这是由于电磁铁与钢球之间的电磁力的大小与它们之间的距离成反比,只要平衡状态稍微受到扰动(如:加在电磁铁线圈上的电压产生脉动、周围的振动、风等),就会导致钢球掉下来或被电磁铁吸住,因此必须对系统实现闭环控制。由电涡流位移传感器检测钢球与电磁铁之间的距离变化,当钢球受到扰动下降,钢球与电磁铁之间的距离增大,传感器输出电压增大,经控制器计算、功率放大器放大处理后,使电磁铁绕组中的控制电流相应增大,电磁力增大,钢球被吸回平衡位置,反之亦然。
3.2 控制对象的运动方程
在物理法则允许条件下,建立磁悬浮系统的数学模型,假设
A1 铁芯是磁饱和的,没有磁滞现象;
A2 铁芯的磁通率无限大
A3 无视铁芯中的生成电流
A4 线圈中的电磁感应系数在平衡点附近是常数
在以上假设条件下,利用浮球的运动方程,磁铁引力,电路方程式等,建立以下等式:

这里,表示铁球的质量,表示电磁铁和铁球的定常间隙(气隙),是电磁铁的引力,,是对电磁体实际特性的修正参数,对应的参数值由实验辨识获得。是电磁铁的电磁感应系数,阻抗。对于(2)式得非线性表示,利用泰勒级数做近似处理得到:
4 PID控制器的设计
4.1 PID控制器
PID(proportional-integral-derivative)控制是在经典控制理论的基础上,通过长期的工程实践总结形成的一种控制方法,其参数物理意义明确,结构改变比较灵活,鲁棒性较强,易于实现,在大多数工业生产过程中控制效果较为显著。现阶段,PID控制仍然是首选的控制策略之一。本设计的磁悬浮控制系统也是先尝试用PID控制器来实现控制。
PID控制器是一种线性控制器,它根据给定值与实际输出值构成控制偏差,将偏差的比例、积分和微分通过线性组合构成控制器,对被控对象进行控制。
4.1.1 模拟PID控制

积分时间常数主要影响系统的稳态精度。积分作用的引入,能消除系统静差,但是在系统响应过程的初期,一般偏差比较大,如果不选取适当的积分系数,就可能使系统响应过程出现较大的超调或者引起积分饱和现象。
微分时间常数主要影响系统的动态性能。因为微分作用主要是响应系统误差变化速率的,它主要是在系统响应过程中当误差向某个方向变化时起制动作用,提前预报误差的变化方向,能有效地减小超调。但是如果微分时间常数过大,就会使阻尼过大,导致系统调节时间过长。
4.1.2 数字PID控制
由于数字处理器只能计算数字量,无法进行连续PID运算,所以若使用数字处理器来实现PID算法,则必须对PID算法进行离散化。数字PID调节器的设计可以通过首先用经典控制理论设计出性能比较满意的模拟调节器,然后通过离散化方法得到。
PID算法的离散化有位置式和增量式两种常用实现方式。
按模拟PID控制算法,以一系列的采样时刻点代替连续时间,以矩形法数值积分近似代替积分,以一阶向后差分近似代替微分,即可得位置式离散PID表达式为:

4.2.3 改进PID控制
由于实际工业生产过程往往具有非线性、时变不确定性,难以建立精确的数学模型,应用常规PID控制器不能达到理想的控制效果,而且在实际生产现场中,由于受到参数整定方法繁杂的困扰,常规PID控制器参数往往整定不良、性能欠佳,对运行工况的适应性很差。因此,在各种工业控制中,不仅可以用常规的PID控制,而且可以根据系统的要求采用各种PID的变形形式,如不完全微分PID控制、带死区的PID控制、积分分离PID控制、微分先行PID控制、削弱积分作用PID控制以及智能PID控制等。
各种改进型PID控制都有其各自的算法,由于本设计中没用到改进PID控制,所以关于其算法这里不再详细介绍。
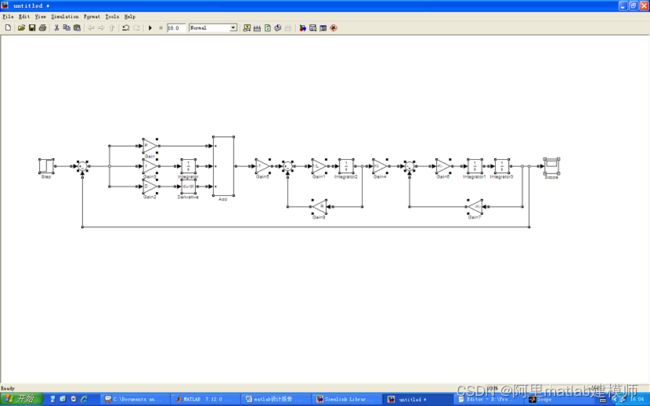
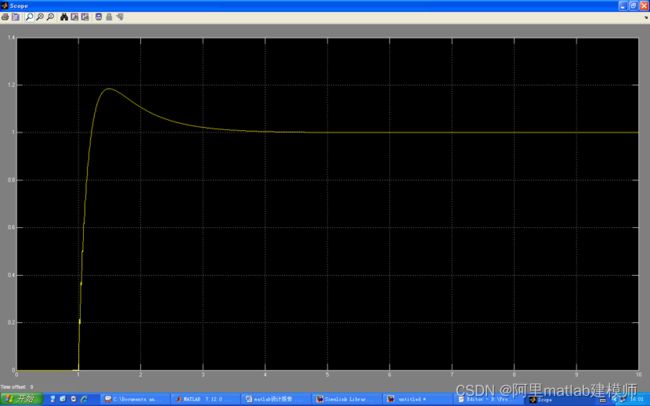
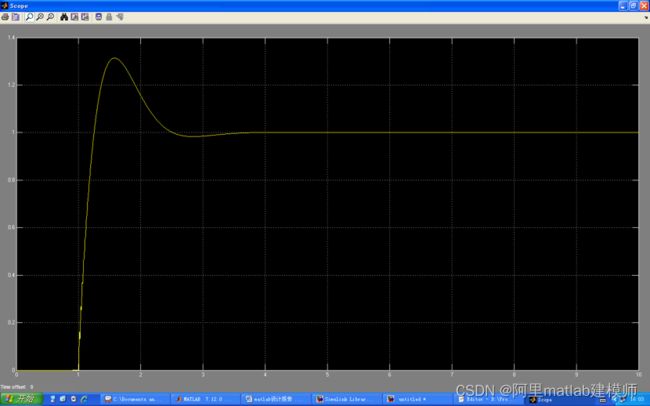
5 MATLAB仿真
仿真部分为《Matlab仿真技术》设计内容,由学习该课程的同学单独完成并提交。具体内容见设计要求。
附表:仿真参数列表
说明:根据仿真参数选取方法选择其中一组完成仿真实验,并将所选参数列表粘贴到正文指定位置。