基于Matlab搭建单站雷达扫描天空仿真平台(附源码)
一、介绍
对象跟踪的目标是在不频繁或不确定的测量值下确定对象的状态。在多个对象的情况下,跟踪算法还必须解决数据关联问题。为了测试这些算法,可以使用跟踪方案来综合生成三维场景中对象的真实检测。
此示例模拟了配备单站雷达传感器的雷达塔扫描天空的场景。在远离传感器的距离处,两架飞机在短时间内近距离飞行。飞机轨迹的紧密间距及其与雷达塔的距离对雷达正确解析两个物体的能力提出了挑战。
二、启动跟踪方案设计器

应用程序将打开并加载方案。跟踪方案设计器应用程序由一个工具条和三个文档组组成:
-
“平台属性”和“传感器属性”面板位于左侧
-
平台画布和传感器画布位于中心
-
右侧显示三维世界视图的方案视图
三、编辑和修改方案
红色平面:通过在“平台画布”中单击红色平面来选择它。

使用轨迹表和时间-高度图检查其轨迹
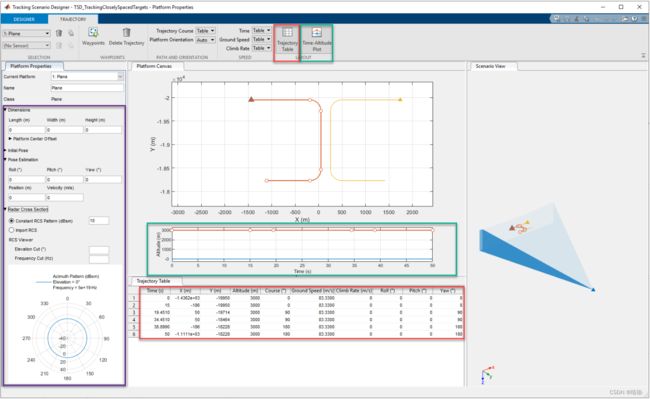
在属性面板(紫色)中,请注意平面建模为长度、宽度和高度尺寸为零的点对象。默认情况下,其雷达横截面为 10 dBsm。单击工具条中的“轨迹表”按钮(红色)以显示此平面的航点列表。轨迹表显示在应用程序的底部中心。
单击工具栏中的时间-高度图按钮(绿色)以显示此平面的高程剖面图。该图将显示在与“平台画布”相同的选项卡中。观察飞机在3000米的高度以83.33米/秒的地面速度飞行。轨迹的持续时间为50s。
可以通过更改表中的参数值或在平台画布中拖动航点来进一步编辑轨迹,如下面 所示。

对于此示例的其余部分,我们使用会话文件中的预定义轨迹。
四、设计塔式平台
通过在“平台画布”上单击塔式平台,或从“平台属性”选项卡的“当前平台”列表中选择塔式平台来选择塔式平台。
选择平台后,塔式平台的传感器属性和传感器画布将变为活动状态。

观察面板中的单静态雷达传感器属性(黄色)。该雷达的更新速率为100 Hz,扫描范围为方位角为40度,高程为10度。它的视野方位角为1.5度,仰角为10度。请注意,我们使用 10.001 def 来确保光束不完全是高程扫描范围的大小,在这种情况下,雷达将在高程扫描两次。
请注意,默认平台帧为 NED(东北向下)。此外,传感器的安装位置被定义为确保雷达位于15米高的塔顶。X = 0, Y = 0, Z = -15
在传感器画布上,您可以使用工具栏(绿色)显示塔的侧视图。轴是以平台为中心的坐标。
可以使用属性面板重新配置传感器,并且可以在传感器画布上拖动其安装位置以进行粗略编辑。
此外,可以在 toolstrip 库中选择一个新传感器并将其安装在塔上,或者使用平台库在场景中添加新平台,然后在其上安装新传感器。这在下面中进行了说明。
五、模拟场景
由于此方案已设置,下一步是运行模拟以生成合成雷达检测。单击“运行”以运行模拟。或者,使用下拉列表选择“运行(不检测)”以仅模拟真实情况。

用程序进入模拟模式,模拟自动开始。将看到两个平面沿其轨迹移动。当一架飞机被塔架检测到时,可以在检测的那一刻看到一个深紫色的标记。为了更好地观察场景,可以使用轴工具栏在 X-Y、X-Z 或 Y-Z 视图之间快速导航。此外,还可以打开和关闭传感器覆盖范围图、轨迹线、地平面投影和方向指示器。

5.1播放控件和时间滚动条
要在光束扫描目标时观察检测创建,请使用回放控件,该控件允许您暂停、后退和向前移动仿真。

时间滚动条位于方案视图的底部。它表示模拟的当前状态以及显示的当前时间。
浅蓝色的进度条显示场景的数据模拟进度。较深的蓝色矩形滑块显示方案动画的进度。
矩形滑块可以在模拟的时间范围内向后(向左)或向前(向右)拖动。
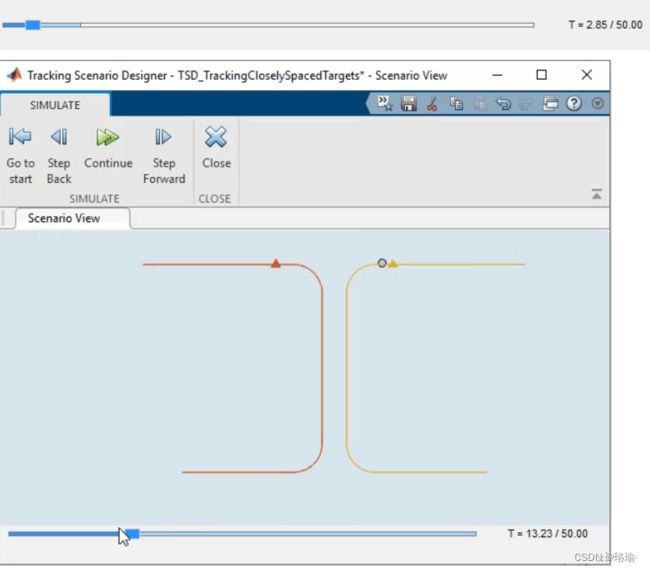
逐步完成仿真,并观察雷达在 和 之间生成每次扫描的单个检测。这是两个模糊的区域,雷达无法解析两架飞机。t = 19.30, st = 20.50 s。

5.2 导出到矩阵
若要查看和编辑用于设计方案的代码,可以将方案导出为 MATLAB 脚本。使用脚本添加跟踪器并以编程方式与方案进行交互。
单击“导出”以查看创建方案的等效脚本。

单击“导出”后,您将看到一个脚本,该脚本可以保存到您选择的文件名中。“方案视图”的当前 3D 视图也会导出到脚本中。
六、运行生成的脚本
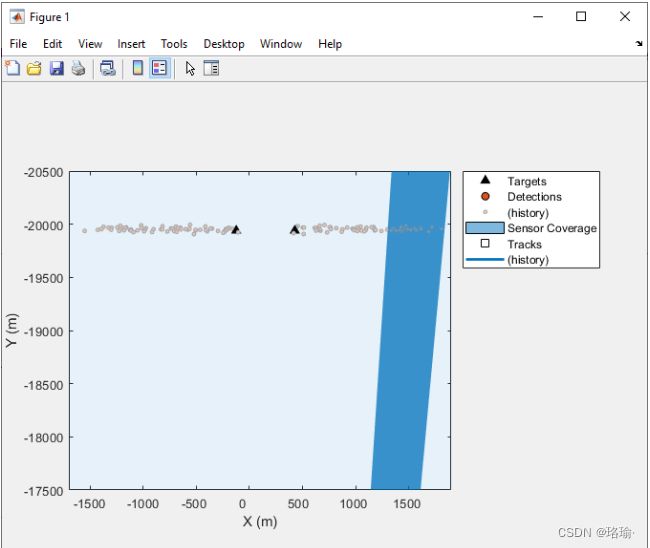
6.1 可视化目标和检测
保存脚本后,您可以运行它并在 MATLAB 中观察动画影院情节。
6.2 可视化轨迹
通过使用上述添加内容重新运行脚本来观察跟踪动画。现在,您将可视化两个平面的轨迹。

七、总结
在此示例中,使用了跟踪方案设计器应用程序来加载跟踪方案会话文件。学习了如何导航应用程序以及如何模拟方案。在这种情况下,两架飞机被单个雷达检测到。在一段时间内,这两架飞机非常接近,以至于雷达无法解析它们。
八、程序
使用Matlab,点击打开。

打开下面的“TrackingScenarioDesignerExample.mlx”文件,点击运行,就可以看到上述效果。

关注下面公众号,后台回复关键词:搭建单站雷达扫描天空仿真平台,发送源码链接。