一文彻底搞懂激光雷达原理!
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
最近一直在搞激光雷达相关东西,今天把了解的激光雷达知识做一个框架整理,顺便梳理了一下行业里面激光雷达相关公司,一起学习,欢迎交流!
一、基础知识
激光雷达成像可以简单理解为使用激光发射部件向一定视场角FOV(Field Of View)内发射光线,同时使用接收部件接收范围内反射回的光线,利用已知和获取的发射光线与反射光线的相关信息,直接计算或推导出反射点的信息(速度、距离、高度、反射强度等)。
激光发射和返回示意
 点云强度、高度、方位、距离
点云强度、高度、方位、距离
见上图,可以看到激光雷达形成的点云图是由一个一个点组成的。如果动图无法查看可以链接到原文阅读!
相关缩写:
dToF:direct Time-of-Flight直接测量光的飞行时间;
iToF:indirect Time-of-Flight通过测量相位偏移来间接测量光的飞行时间;
PLD:脉冲激光二极管,一种激光雷达发光元件;
APD:雪崩光二极管,一种激光雷达感光元件;
SPAD:Single Photon Avalanche Diode单光子雪崩二极管,一种激光雷达感光元件;
SiPM:Silicon photomultiplier硅光电倍增管,一种激光雷达感光元件;
CMOS:Compound metal Oxided Semiconductor 复合金属氧化物半导体,一种摄像头感光元件;
CCD:Charge Coupled Device电荷耦合器件,一种摄像头感光元件;
CIS:CMOS image sensor互补金属氧化物半导体图像传感器;
OPA:Optical Phased Arrays 光学相控阵;
FPA:Focal Plane Array焦平面阵列;
WD:Wavelength Disperion波长色散;
MEMS:Micro-Electro-Mechanical System 微机电系统;
二、技术原理
激光雷达探测的具体技术可以分为TOF飞行时间法与相干探测方法。其中ToF方法可以进一步区分为iToF和dToF方法;
1、飞行时间(ToF)探测方法
通过直接计算发射及接收电磁波的时间差测量被测目标的距离;
 ToF雷达原理
ToF雷达原理
2、相干探测方法(如:FMCW)
通过测量发射电磁波与返回电磁波的频率变化解调出被测目标的距离及速度;
 FMCW雷达原理示意图
FMCW雷达原理示意图
三、激光雷达的FOV
FOV指激光雷达能够探测到的视场范围,可以从垂直和水平两个维度以角度来衡量范围大小,下图比较形象的展示了激光雷达FOV范围,之所以要提到FOV是因为后面不同的技术路线基本都是为了能够实现对FOV区域内探测。
垂直FOV:常见的车载激光雷达通常在25°,形状呈扇形;
水平FOV:常见的机械式激光雷达可以达到360°范围,通常布置于车顶;常见的车载半固态激光雷达通常可以达到120°范围,形状呈扇形,可布置于车身或车顶;
 FOV示意图
FOV示意图
四、技术路线
从功能模块可以把激光雷达分为激光器、扫描部分、感光芯片三部分,每一部分又可以进一步细分为下图:
 激光雷达主要构成部分
激光雷达主要构成部分
根据激光雷达扫描部分有无运动部件将其分类为机械式、半固态、纯固态三种类型的激光雷达是我们最为熟知的分类方法。
1、激光器
由于激光器发射的光线需要投射至整个FOV平面区域内,除了面光源可以直接发射整面光线外,点光源则需要做二维扫描覆盖整个FOV区域,线光源需要做一维扫描覆盖整个FOV区域。其中点光源根据光源发射的形式又可以分为EEL(Edge-Emitting Laser边发射激光器)和VCSEL(Vertical-Cavity Surface-Emitting Laser垂直腔面发射激光器)两种,二者区别在于EEL激光平行于衬底表面发出(如图1),VCSEL激光垂直于衬底表面发出(如图2)。
 EEL与VCSEL发射对比
EEL与VCSEL发射对比
其中VCSEL式易于进行芯片式阵列布置,通常使用此类光源进行阵列式布置形成线光源(一维阵列)或面光源(二维阵列),VCSEL光源剖面图与二维阵列光源芯片示意图如下。
 VCSEL剖面与二维阵列示意图
VCSEL剖面与二维阵列示意图
2、扫描部件
扫描部件通常可以分为运动式扫描和非运动式扫描两种,具体实现方式可以进一步细分如下:
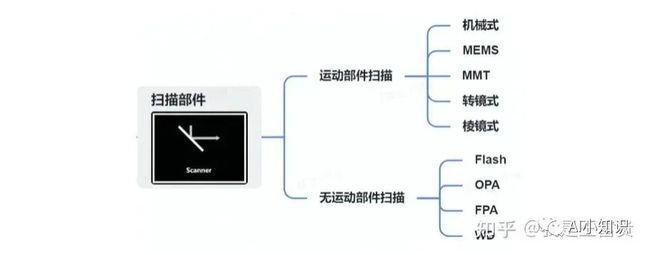 扫描形式分类
扫描形式分类
a、机械式
使用电机灯机械结构带动扫描结构进行旋转,通常机械式借光雷达可以达到360°的水平视场角,由于存在高频运动部件,耐久性通常不佳,常见结构图如下:
 机械式雷达常见结构示意
机械式雷达常见结构示意
b、MEMS
通过高速振动的二维运动微振镜代替传统的机械旋转装置,可以将点光源扫射到有限FOV区域内,采用此技术可以将振动折射部件做到芯片化,减小体积便于集成,同时降低成本便于批量化生产,不足之处在于振镜尺寸和材质对于光通量和激光功率有一定限制。
 MEMS核心部件--微振镜结构示意
MEMS核心部件--微振镜结构示意
c、MMT
通过共轭光源和接收装置的震动实现光线在FOV内的扫描,无需折射镜属于Cepton独有的一种技术,其振动类似于扬声器发生腔的震动原理;
 MMT微动技术示意
MMT微动技术示意
d、转镜式
简而言之,使用转镜折射光线实现激光在FOV区域内的覆盖,通常与线光源配合使用,形成FOV面的覆盖,也可以与振镜组合使用,配合点光源形成FOV面的覆盖;
点光源+转镜式示意
e、棱镜式
通过利用激光雷达通过棱镜产生折射的原理,利用两块棱镜通过旋转实现激光线束的不同角度折射,从而覆盖FOV区域,DJI旗下的Livox部分激光雷达产品就使用了这一技术,特点是其成像点云成菊花状。
 棱镜及点云扫描示意
棱镜及点云扫描示意
f、Flash
Flash激光雷达采用面光源泛光成像,其发射的光线会散布在整个视场内,因此不需要折射就可以覆盖FOV区域了,难点在于如何提升其功率密度从而提升探测精度和距离,目前通常使用VCSEL光源组成二维矩阵形成面光源;
 亮道智能的Flash激光雷达
亮道智能的Flash激光雷达
g、OPA相控阵
利用光的相干性质,通过人为控制相位差实现不同方向的光发射效果;
相干与扫描原理示意
除了以上几种之外,还有FPA(焦平面阵列)、Wavelength Dispersion(色散)等技术可用于实现类似扫描效果,应用较少不重点介绍。
3、接收器
激光的接收可以通俗的理解为,光子携带的能量传递给电子,电子摆脱束缚形成电流(光生载流子),而能够产生这种效应激光雷达接收器主要可以分为PIN、APD(雪崩二极管)、SPAD(单光子雪崩二极管)、SiPM(硅光电倍增管)几种,其本质都是各类型PN结,下面做简要介绍:
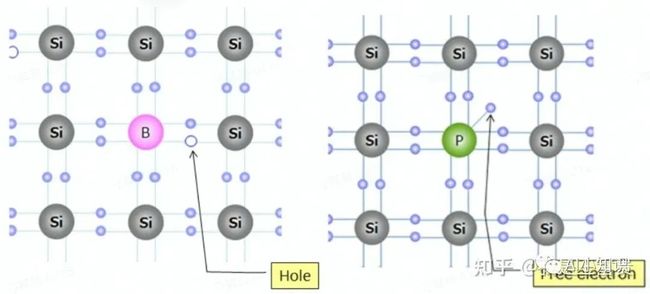 左-P型半导体,右-N型半导体
左-P型半导体,右-N型半导体
P(Positive)型半导体:带“空穴”(可理解为能容纳电子的空位)的半导体,通常为在纯硅中掺入微量3价元素(如铟B、铝ln)的混合物,由于铟或铝原子周围有3个价电子,与周围4价硅原子组成共价结合时缺少一个电子,形成一个相当于带正电的粒子“空穴”。
N(Negative)型半导体:带“自由电子”,通常为在纯硅中掺入微量5价元素(如磷P、砷As或锑Sb)的混合物,由于硅有四个价电子,磷有五个价电子,因此磷的一个价电子就可以作为剩余电子自由移动(自由电子*)。
通过采用不同的掺杂工艺和扩散作用,将P型半导体与N型半导体制作在同一块半导体(通常是硅或锗)基片上,在它们的交界面就形成空间电荷区称为PN结,其具有单向导电性,利用光辐射对PN结反向电流的调制作用可以制成光电探测器!以下就是典型的光电探测芯片材料!
 感光芯片类型
感光芯片类型
a、PIN
P-I-N 结构。P为P型半导体,N为N型半导体,I 为本征半导体。由于没有雪崩效应,其灵敏度较低。接收面积也小,温度稳定性不佳。由于其响应速度很快(可高达 10GHZ),结电容低,可用于近距离探测激光雷达。
在继续介绍以下几种材料前,介绍下PN结另一个特性“雪崩效应”
雪崩击穿:阻挡层中的载流子漂移速度随内部电场的增强而相应加快到一定程度时,其动能足以把束缚在共价键中的价电子碰撞出来,产生自由电子—空穴对,新产生的载流子在强电场作用下,再去碰撞其它中性原子,又产生新的自由电子—空穴对,如此连锁反应,使阻挡层中的载流子数量急剧增加,象雪崩一样,以下3种材料全部使用了此效应。
b、APD (雪崩光电二极管)
对以硅或锗为材料制成的光电二极管的PN结施加反向偏压,射入的光被PN结吸收后会形成光电流。加大反向偏压会产生“雪崩”(即光电流成倍地激增)的现象,形成电流增益效应,通过对电流进行处理进而生成激光雷达的可用信号,可用于激光雷达探测器。
c、SPAD (单光子雪崩二极管)
顾名思义,可以对单个光子发生雪崩效应,因此有极高的探测敏感度和探测距离,对反射强度要求低,在明亮的阳光下也能工作,分辨率极佳,并且可以芯片化降低成本,是当前LiDAR探测器主要发展方向。
d、SiPM( 硅光电倍增管)
另一种材料的单光子雪崩二极管,具有极高的探测敏感度和探测距离,其与SPAD的区别在于SPAD是一个单像素盖革模式的探测器,探测器尺寸较小,而SiPM是由多个盖革模式的探测器同时信号输出,相对探测器尺寸较大。因此,在相同的分辨率要求下,SPAD阵列的面积更小,SiPM阵列的面积较大,但其优势在于在进行信号提取时,可以按照阈值的设置完成信号的提取。因此如果更加关注Lidar分辨率,SPAD是更好的选择,如果更加关注帧速和信号提取速度,SiPM是更好的选择。
 安森美半导体的生产的两种感光芯片
安森美半导体的生产的两种感光芯片
五、领域玩家
作为自动驾驶领域传感器的重要组成部分,与激光雷达相关的各类企业非常之多,既包括传统光电领域大佬,也包括各类初创公司,整体来看国内在整机领域初创企业布局较多,而在技术壁垒较高的芯片领域依然以传统大佬公司为主,整理了一张图,从左到右分别是整机--激光器--感光芯片,每个领域上方为国外相关企业,下方为国内相关企业,大家看看可以认出是哪些公司吗!
 相关企业一览
相关企业一览
公司很多,改天抽其中几家代表性的产品拿出来比较分析下!一起学习,欢迎自动驾驶同业交流!
【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D感知、多传感器融合、SLAM、高精地图、规划控制、AI模型部署落地等方向;
加入我们:自动驾驶之心技术交流群汇总!
自动驾驶之心【知识星球】
想要了解更多自动驾驶感知(分类、检测、分割、关键点、车道线、3D感知、多传感器融合、目标跟踪)、自动驾驶定位建图(SLAM、高精地图)、自动驾驶规划控制、领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球(三天内无条件退款),日常分享论文+代码,这里汇聚行业和学术界大佬,前沿技术方向尽在掌握中,期待交流!
