自动控制原理 - 1 绪论内容
注意:1.学习目标是掌握基本理论理解扎实,抓主要内容主要方法牢记扎实
2.学习理论的目的是为了应用,因此时刻结合应用角度与分享人角度去学习。
3.打完扎实基础后如果以后有什么不明白知识点回来补充与学习。
1 绪论内容1.1 自动控制系统的基本原理1.2 自动控制系统的分类1.3 自动控制系统的要求1.4 自动控制的发展史
1 绪论内容
1.1 自动控制系统的基本原理
什么是控制:使某个(某些)量按一定的规律变化,某个(某些)量称为被控制量。
自动控制: 在脱离人的直接干预下,利用控制装置,使被控对象按照预定的规律运行;
自动控制系统: 将被控的对象和实现控制功能的控制装置组合起来---称为自动控制系统。
被控对象 (也称被控过程、被控系统):它可能是一个设备,多数由一些机器零件有机地组合在一起,
其作用是完成一种特定的操作。
被控参数(也称为系统输出)体现系统控制目的的物理量。(速度,距离、方位角度等)
控制参数:由控制器改变的量,对被控参数有较好的调节能力。(阀门开度、电枢电压等)
系统输入:作用于被控对象或系统输入端,并可使系统具有预定功能或预定输出的物理量。(给定温度,电位器滑杆位置)
扰动:一种对系统的输出量产生影响的信号。(水箱漏出水、负载等)
开环控制:输出量对输入量(控制作用)没有影响的系统。缺点:没有抵抗扰动的能力。
闭环控制:将输出量与参考输入量进行比较,并且将它们的偏差作为控制手段,以保持两者之间预定关系的
系统,也称为反馈控制系统。将输出量反送到输入端,与输入端形成偏差称之为反馈。控制系统中主要采用负反馈。
负反馈(输入量与抽出量相减)特点:反馈的加入,使偏差越来越小。使系统对参数不敏感。
正反馈(输入量与抽出量相互叠加)特点:反馈的加入,使偏差越来越大。(振荡发生器)
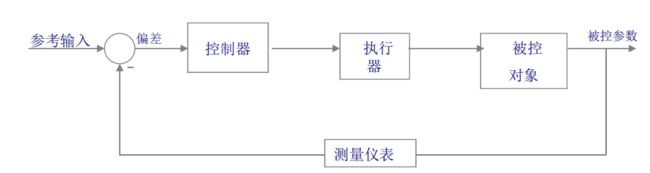
控制系统通常习惯用结构图来表示:方框代表功能模块;带箭头的线段:代表信号传递方向;典型的控制系统结构图如下。参考输入与测量仪表得到的被控参数进行误差运算,形成的误差信号经过控制器运算输出控制量,控制量通过执行器作用到被控对象去改变控制参数。
1.2 自动控制系统的分类
按输入信号的变化规律分:
定值控制:参考输入为一个恒定的值。如速度控制、液位控制等。
程序控制:参考输入为一个已知的时间函数。如热处理过程先升温后降温。
随动控制:参考输入为一个随机变化的函数。雷达天线跟踪系统等
按系统中传递信号的特点分
连续信号:系统中传递的信号都是时间轴上连续的信号。描述对象的数学模型是微分方程。
离散系统:系统中某一处或几处信号为脉冲序列或时间轴上不连续的信号,描述此类系统的数学模型为差分方 程。典型的如计算机控制系统。
按系统特点分
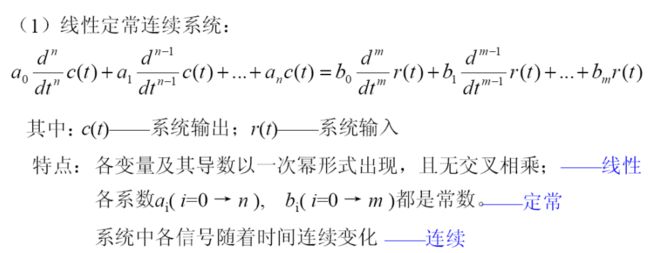
线性系统:组成系统的所有元件或子系统都是线性的。包括线性定常连续系统(线性微分方程描述它)与线性定常离散系统(线性差分方程描述它)。例如图示线性定常连续系统。
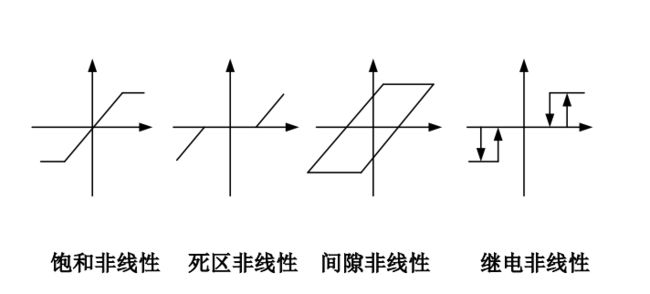
非线性系统:系统中至少有一个元件或子系统是非线性的。
按系统输入输出数量分
单输入单输出(经典控制理论):如电动机速度控制系统
多输入多输出(现代控制理论):如四旋翼系统
按系统功能分:温度控制、速度控制、位置控制。
按控制规律分:
古典控制系统(基于传递函数建立被控对象数学模型,根据根轨迹法与频域法分析法 来设计与分析控制器)
现代控制系统(基于状态空间描述对象数学模型,利用状态反馈设计控制器)
模糊控制系统(利用模糊理论设计控制器)。
神经网络控制系统(利用神经网络理论建立被控对象数学模型,设计控制器)。
模糊控制与神经网络控制属于智能控制范畴。
1.3 自动控制系统的要求
建立控制系统的目的:1保证系统输出具有控制输入指定的数值;2保证系统输出尽量不受扰动的影响
对系统的具体要求:
(1)系统稳定性:即恢复到平衡状态能力,不能等幅度震荡或震荡越来越大,是控制的最基本要求。
(2)系统动态快速性:即快速达到期望值,为工作高效要求。如汽车百米加速响应
(3)系统的稳态性:当被控制量由初始值变为另一个希望值时,某些控制系统会出现超调现象。即被控制量会超过希望值,并经过若干次摆动以后才达到希望值。
(4)准确性:如果要求被控制量由初始值变为另一个希望值时,在变化过程结束后,被控制量能够达到希望值,说明该系统具有很好的准确性。
以上四项对控制系统的要求可以归纳为“稳、快、平、准”四个字。其中,快速性和平稳性反映控制系统的动态品质;准确性反映反映控制系统的稳态精度;而稳定性则是控制系统能够正常工作的先决条件。
本课程的任务:研究一种方法(或理论)来指导构筑一个控制系统达到系统目标。具体做法是设计控制装置以达到系统的目的。
认识控制世界:即了解各种元器件或子系统的运动规律、动力学方程(即建立数学模型) ;了解某种控制器对系统输出的影响(即系统分析)。其中对应章节:第2章:自动控制系统的数学模型。第3章:自动控制系统的时域分析。第4章:自动控制系统的根轨迹分析。第5章:自动控制系统的频域分析。
改造控制世界:设计控制器(系统设计或系统综合) 对应第6章:自动控制系统的校正
1.4 自动控制的发展史
经典控制理论阶段1900-1950(以传递函数作为系统数学模型):
麦克斯韦尔基于微分方程描述从理论上给出了它的稳定性条件。
劳斯与霍尔维茨分别独立给出了高阶线性系统的稳定性判据
李雅普诺夫给出了非线性系统的稳定性判据
柰奎斯特提出了负反馈系统的频率域稳定性判据。
伊文斯又进一步提出了属于经典方法的根轨迹设计法,它给出了系统参数变换与时域性能变化之间的关系
经典控制理论的分析方法为复数域方法,以传递函数作为系统数学模型,优点:可通过试验方法建立数学模型, 物理概念清晰。缺点:只适应单变量线性定常系统,对系统内部状态缺少了解。
现代控制理论阶段1920-now(以状态空间表达式为模型):
1954年贝尔曼(R.Bellman)的动态规划理论;
1956年庞特里雅金(L.S.Pontryagin)的极大值原理
1960年卡尔曼(R.E.Kalman)提出多变量最优控制和最优滤波理论。
状态空间方法属于时域方法,其核心是最优化技术。它以状态空间描述(实质上是一阶微分或差分方程组)作
为数学模型,适应于多变量、非线性、时变系统
智能控制阶段:
智能控制依据人的思维方式和处理问题的技巧,解决那些目前需要人的智能才能解决的复杂的控制问题。被控对象的复杂性体现为:模型的不确定性,高度非线性,分布式的传感器和执行器,动态突变,多时间标度,复杂的信息模式,庞大的数据量,以及严格的特性指标等。环境的复杂性则表现为变化的不确定性和难以辨识。试图用传统的控制理论和方法去解决复杂的对象,复杂的环境和复杂的任务是不可能的。智能控制的方法包括模糊控制,神经元网络控制,专家控制等方法。