【KITTI】KITTI数据集简介(二) — 标注数据label_2
Kitti标签存储在data_object_label_2文件夹中,存储为txt文本文件,即data_object_label_2/training/label_2/xxxxxx.txt。标签中仅不含了7481个训练场景的标注数据,而没有测试场景的标注数据。
为了快速进行算法调试、训练、评估和验证,以及快速下载,我们建立了一个mini kitti数据集,数据集的文件目录结构与完整KITTI数据集保持一致。其中,小型的标注数据集,即 mini label_2 (data_object_label_2_mini)保存了20张训练标注。Mini Kitti数据集下载地址为:minikitti数据集-深度学习文档类资源-CSDN下载。 如果需要对应的ImageSets,请下载:train_val_testforminikitti-深度学习文档类资源-CSDN下载,将下载的文件夹重名为ImageSets即可。
关于KITTI各个部分的介绍请分别参考以下内容:
KITTI数据集简介(一) — 激光雷达数据_Coding的叶子的博客-CSDN博客_雷达数据集
KITTI数据集简介(二) — 标注数据label_2_Coding的叶子的博客-CSDN博客_kitti数据集标注
KITTI数据集简介(三) — 图像数据image_2_Coding的叶子的博客-CSDN博客
KITTI数据集简介(四) — 标定校准数据calib_Coding的叶子的博客-CSDN博客
标注文件中16个属性,即16列。但我们只能够看到前15列数据,因为第16列是针对测试场景下目标的置信度得分,也可以认为训练场景中得分全部为1但是没有专门标注出来。下图是000001.txt的标注内容和对应属性介绍。
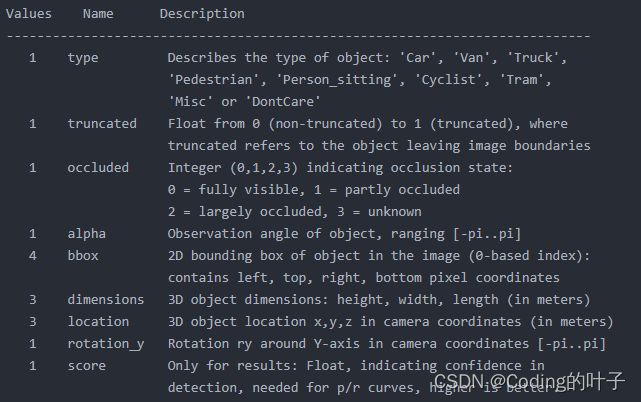
相机坐标系中,y方向是高度方向,以向下为正方向;z方向是汽车前进方向;前进右手边方向为x方向(车身方向),满足右手定则。激光雷达坐标系中,z方向是高度方向,x方向是汽车前进方向,前进左手边方向为y方向(车身方向),满足右手定则。
第1列
目标类比别(type),共有8种类别,分别是Car、Van、Truck、Pedestrian、Person_sitting、Cyclist、Tram、Misc或'DontCare。DontCare表示某些区域是有目标的,但是由于一些原因没有做标注,比如距离激光雷达过远。但实际算法可能会检测到该目标,但没有标注,这样会被当作false positive (FP)。这是不合理的。用DontCare标注后,评估时将会自动忽略这个区域的预测结果,相当于没有检测到目标,这样就不会增加FP的数量了。此外,在 2D 与 3D Detection Benchmark 中只针对 Car、Pedestrain、Cyclist 这三类。
第2列
截断程度(truncated),表示处于边缘目标的截断程度,取值范围为0~1,0表示没有截断,取值越大表示截断程度越大。处于边缘的目标可能只有部分出现在视野当中,这种情况被称为截断。
第3列
遮挡程度(occlude),取值为(0,1,2,3)。0表示完全可见,1表示小部分遮挡,2表示大部分遮挡,3表示未知(遮挡过大)。
第4列
观测角度(alpha),取值范围为(-pi, pi)。是在相机坐标系下,以相机原点为中心,相机原点到物体中心的连线为半径,将物体绕相机y轴旋转至相机z轴,此时物体方向与相机x轴的夹角。这相当于将物体中心旋转到正前方后,计算其与车身方向的夹角。
第5-8列
二维检测框(bbox),目标二维矩形框坐标,分别对应left、top、right、bottom,即左上(xy)和右下的坐标(xy)。
第9-11列
三维物体的尺寸(dimensions),分别对应高度、宽度、长度,以米为单位。
第12-14列
中心坐标(location),三维物体中心在相机坐标系下的位置坐标(x,y,z),单位为米。
第15列
旋转角(rotation_y),取值范围为(-pi, pi)。表示车体朝向,绕相机坐标系y轴的弧度值,即物体前进方向与相机坐标系x轴的夹角。rolation_y与alpha的关系为alpha=rotation_y - theta,theta为物体中心与车体前进方向上的夹角。alpha的效果是从正前方看目标行驶方向与车身方向的夹角,如果物体不在正前方,那么旋转物体或者坐标系使得能从正前方看到目标,旋转的角度为theta。
第16列
置信度分数(score),仅在测试评估的时候才需要用到。置信度越高,表示目标越存在的概率越大。
python三维点云从基础到深度学习_Coding的叶子的博客-CSDN博客_3d点云 python从三维基础知识到深度学习,将按照以下目录持续进行更新。更新完成的部分可以在三维点云专栏中查看。https://blog.csdn.net/suiyingy/category_11740467.htmlhttps://blog.csdn.net/suiyingy/category_11740467.html1、点云格式介绍(已完成)常见点云存储方式有pcd、ply、bin、txt文件。open3d读写pcd和plhttps://blog.csdn.net/suiyingy/article/details/124017716
更多三维、二维感知算法和金融量化分析算法请关注“乐乐感知学堂”微信公众号,并将持续进行更新。