【Arduino】Benewake(北醒) TF-LC02(TTL)基于Arduino 开发板运用说明
目录
- 前言
- Benewake(北醒) TF-LC02产品简要说明
- Arduino开发板介绍
- Benewake(北醒) TF-LC02 接口及通讯协议说明
-
- 接口定义
- 串口协议说明
- 通讯协议说明
- 功能码说明
- 接线示意图
- 例程说明
-
- 配置软硬串口
- 定义获取TOF数据的结构
- 获取雷达距离数据的协议解析
- 采用串口中断获取雷达数据
- 通过主循环发送获取距离指令,并打印结果(可根据需求打印结果)
- 打印通用Ascii 码结果
- 打印北醒9byte通用协议
- 完整例程分析
前言
本例程仅用作参考
Benewake(北醒) TF-LC02产品简要说明
性能参数
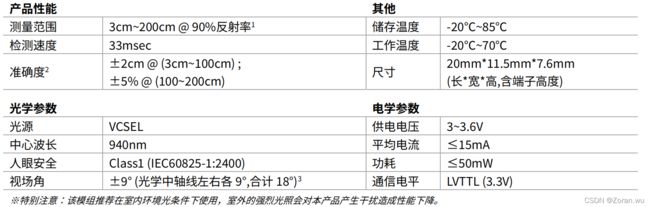
产品图片及尺寸

Arduino开发板介绍
参考链接:常用Arduino板介绍
Benewake(北醒) TF-LC02 接口及通讯协议说明
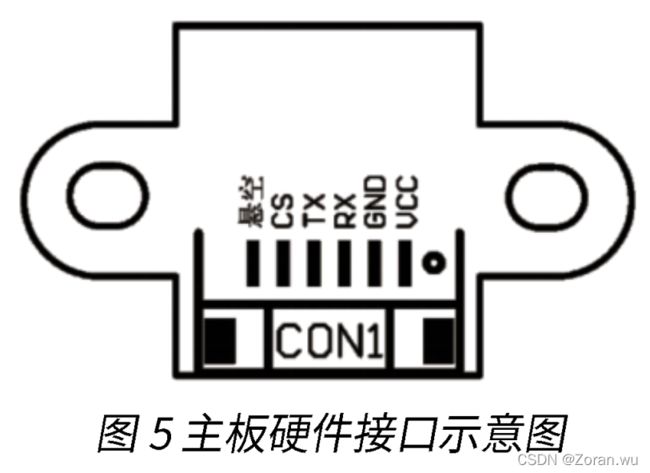
接口定义
串口协议说明


通讯协议说明

功能码说明


接线示意图

注:线路颜色仅供参考,具体参照实际线路颜色定义
例程说明
配置软硬串口
- 引入软串口用来打印收到雷达并处理后的数据
#include 定义获取TOF数据的结构
- 设置获取距离的指令
u8 cmd[5] = {0x55, 0xAA, 0x81, 0x00, 0xFA}; //获取距离指令
typedef struct {
int distance;
u8 ErrorCode; //TOF错误码请参考使用说明书
boolean receiveComplete;
} TF;
TF Lidar = {0,0,false};
获取雷达距离数据的协议解析
/***************************************
- 通讯协议:
- 2 byte : 帧头 0x55 0xAA
- 1 byte : 功能码 (详细参考使用说明) 例:0x81 获取距离值 单位:mm
- 1 byte : 后面参数的长度
- N byte : 设定参数
- 1 byte : 帧尾 0xFA
- ***************************************
- 例:获取距离值
- Arduino 发送:55 AA 81 00 FA
- TOF模组回复 : 55 AA 81 03 01 55 00 FA
**************************************/
void getLidarData(TF* lidar) {
static char i = 0;
static int rx[8];
if (Serial.available())
{
rx[i] = Serial.read();
if (rx[0] != 0x55)
{
i = 0;
} else if (i == 1 && rx[1] != 0xAA)
{
i = 0;
} else if (i == 7)
{
i = 0;
if (rx[7] == 0xFA)
{
lidar->distance = rx[5] + rx[4] * 256;
lidar->ErrorCode = rx[6];
lidar->receiveComplete = true;
}
} else
{
i++;
}
}
}
采用串口中断获取雷达数据
void serialEvent() {
getLidarData(&Lidar);
}
通过主循环发送获取距离指令,并打印结果(可根据需求打印结果)
void loop() {
if (!Lidar.receiveComplete)
{
Serial.write(cmd, 5);
} else
{
Port_Print_Ascii(&Lidar); // Ascii 打印输出结果
//Port_Print_Benewake_9Byte(&Lidar); // 北醒通用9Byte打印
Lidar.receiveComplete = false;
delay(33); //延时33ms,雷达探测速率最快33ms
}
}
打印通用Ascii 码结果
void Port_Print_Ascii(TF* lidar)
{
Port_Debug.print("Dist = ");
Port_Debug.println(lidar->distance);
if(lidar->ErrorCode)
{
Port_Debug.print("ErrorCode = ");
Port_Debug.println(lidar->ErrorCode,HEX);
}
}
串口助手显示

打印北醒9byte通用协议
void Port_Print_Benewake_9Byte(TF* lidar)
{
u8 i = 0;
u8 CheckSum = 0;
u8 B_9Byte[9];
B_9Byte[0] = 0x59;
B_9Byte[1] = 0x59;
B_9Byte[2] = lidar->distance & 0xFF;
B_9Byte[3] = lidar->distance >> 8;
B_9Byte[4] = 0x00;
B_9Byte[5] = 0x00;
B_9Byte[6] = 0x00;
B_9Byte[7] = 0x00;
for(i=0;i<7;i++){
CheckSum += B_9Byte[i];
}
B_9Byte[8] = CheckSum & 0xFF;
Port_Debug.write(B_9Byte,9);
}
串口助手显示

北醒上位机显示

完整例程分析
#include