基于Matlab使用互补滤波器和IMU数据估计方向(附源码)
此示例演示如何从 Arduino 流式传输 IMU 数据并使用互补滤波器估计方向。
一、链接硬件
将 MPU-9250 传感器的 SDA、SCL、GND 和 VCC 引脚连接到 Arduino® 硬件的相应引脚。此示例使用具有以下连接的 Arduino® Uno 板:
-
SDA - A4
-
标准及校正实验所 - A5
-
可变电压调节 - +3.3V
-
接地 - 接地
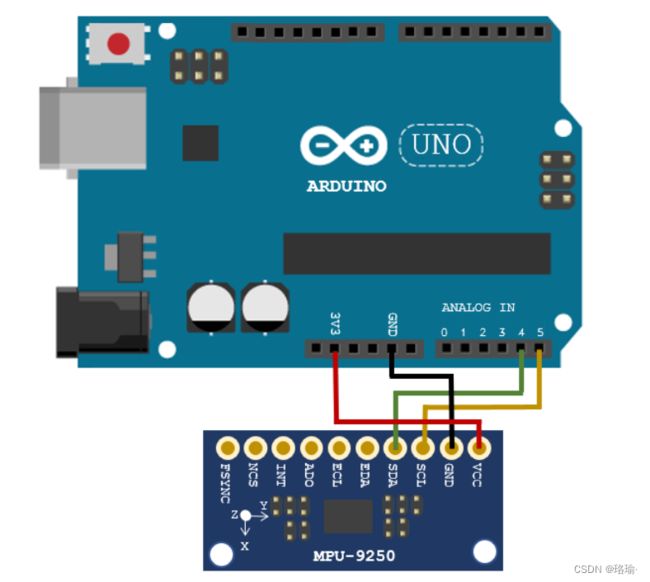
确保与传感器的连接完好无损。建议将传感器安装/连接到原型屏蔽,以避免传感器运动时连接松动。请参阅传感器故障排除页面以调试与传感器相关的问题。
二、创建传感器对象
指定传感器采样率和运行循环的时间量。(可选)启用该标志以检查是否有任何样本溢出。通过禁用 theflag,还可以使用保存在 MAT 文件中的传感器数据运行该示例。当 IMU 通常朝向正南时记录数据,然后旋转:
-
围绕 z 轴 +90 度
-
围绕 z 轴 -180 度
-
围绕 z 轴 +90 度
-
围绕 y 轴 +90 度
-
围绕 y 轴 -180 度
-
围绕 y 轴 +90 度
-
围绕 x 轴 +90 度
-
围绕 x 轴 -270 度
-
围绕 x 轴 +180 度
请注意,围绕 x 轴的最后两次旋转是额外的 90 度。这样做是为了将设备倒置。IMU 的最终方向与初始方向相同,正南。
Fs = 100;
samplesPerRead = 10;
runTime = 20;
isVerbose = false;
useHW = true;
if useHW
a = arduino;
imu = mpu9250(a, 'SampleRate', Fs, 'OutputFormat', 'matrix', ...
'SamplesPerRead', samplesPerRead);
else
load('loggedMPU9250Data.mat', 'allAccel', 'allGyro', 'allMag', ...
'allT', 'allOverrun', ...
'numSamplesAccelGyro', 'numSamplesAccelGyroMag')
end三、将 MPU-9250 传感器的轴与 NED 坐标对齐
MPU-9250 中的加速度计、陀螺仪和磁力计的轴彼此不对齐。指定每个传感器的索引和符号 x、y 和 z 轴,以便传感器在静止时与东北向下 (NED) 坐标系对齐。在此示例中,磁力计轴更改,而加速度计和陀螺仪轴保持固定。对于自己的应用程序,请根据需要更改以下参数。
% Accelerometer axes parameters.
accelXAxisIndex = 1;
accelXAxisSign = 1;
accelYAxisIndex = 2;
accelYAxisSign = 1;
accelZAxisIndex = 3;
accelZAxisSign = 1;
% Gyroscope axes parameters.
gyroXAxisIndex = 1;
gyroXAxisSign = 1;
gyroYAxisIndex = 2;
gyroYAxisSign = 1;
gyroZAxisIndex = 3;
gyroZAxisSign = 1;
% Magnetometer axes parameters.
magXAxisIndex = 2;
magXAxisSign = 1;
magYAxisIndex = 1;
magYAxisSign = 1;
magZAxisIndex = 3;
magZAxisSign = -1;
% Helper functions used to align sensor data axes.
alignAccelAxes = @(in) [accelXAxisSign, accelYAxisSign, accelZAxisSign] ...
.* in(:, [accelXAxisIndex, accelYAxisIndex, accelZAxisIndex]);
alignGyroAxes = @(in) [gyroXAxisSign, gyroYAxisSign, gyroZAxisSign] ...
.* in(:, [gyroXAxisIndex, gyroYAxisIndex, gyroZAxisIndex]);
alignMagAxes = @(in) [magXAxisSign, magYAxisSign, magZAxisSign] ...
.* in(:, [magXAxisIndex, magYAxisIndex, magZAxisIndex]);执行额外的传感器校准:如有必要,可以校准磁力计以补偿磁失真。
指定补充筛选器参数有两个可调参数。该参数确定加速度计测量相对于陀螺仪测量的信任程度。该参数确定磁力计测量相对于陀螺仪测量的信任程度。
compFilt = complementaryFilter('SampleRate', Fs)四、使用加速度计和陀螺仪估计方向
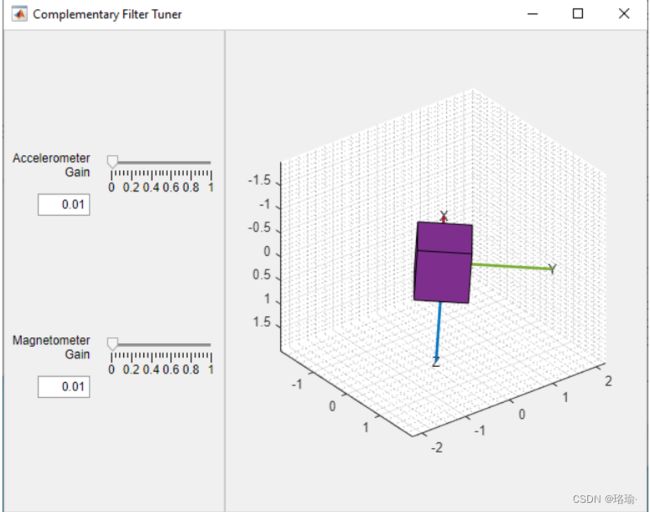
将属性设置为 以禁用磁力计测量输入。在这种模式下,滤波器仅将加速度计和陀螺仪测量值作为输入。此外,筛选器假定 IMU 的初始方向与父导航框架对齐。如果 IMU 最初未与导航框架对齐,则方向估计中将存在恒定的偏移。
,滤波器仅将加速度计和陀螺仪测量值作为输入。此外,筛选器假定 IMU 的初始方向与父导航框架对齐。如果 IMU 最初未与导航框架对齐,则方向估计中将存在恒定的偏移。HasMagnetometerfalse
compFilt = complementaryFilter('HasMagnetometer', false);
tuner = HelperOrientationFilterTuner(compFilt);
if useHW
tic
else
idx = 1:samplesPerRead;
overrunIdx = 1;
end
while true
if useHW
[accel, gyro, mag, t, overrun] = imu();
accel = alignAccelAxes(accel);
gyro = alignGyroAxes(gyro);
else
accel = allAccel(idx,:);
gyro = allGyro(idx,:);
mag = allMag(idx,:);
t = allT(idx,:);
overrun = allOverrun(overrunIdx,:);
idx = idx + samplesPerRead;
overrunIdx = overrunIdx + 1;
pause(samplesPerRead/Fs)
end
if (isVerbose && overrun > 0)
fprintf('%d samples overrun ...\n', overrun);
end
q = compFilt(accel, gyro);
update(tuner, q);
if useHW
if toc >= runTime
break;
end
else
if idx(end) > numSamplesAccelGyro
break;
end
end
end
五、使用加速度计、陀螺仪和磁力计估计方向
使用默认值 and,滤波器在短期内更信任陀螺仪测量,但在长期内更信任加速度计和磁力计测量。这使得滤波器对快速的方向变化更具反应性,并防止方向估计在更长的时间内漂移。对于特定的 IMU 传感器和应用目的,可能需要调整滤波器的参数以提高方向估计精度。
compFilt = complementaryFilter('SampleRate', Fs);
tuner = HelperOrientationFilterTuner(compFilt);
if useHW
tic
end
while true
if useHW
[accel, gyro, mag, t, overrun] = imu();
accel = alignAccelAxes(accel);
gyro = alignGyroAxes(gyro);
mag = alignMagAxes(mag);
else
accel = allAccel(idx,:);
gyro = allGyro(idx,:);
mag = allMag(idx,:);
t = allT(idx,:);
overrun = allOverrun(overrunIdx,:);
idx = idx + samplesPerRead;
overrunIdx = overrunIdx + 1;
pause(samplesPerRead/Fs)
end
if (isVerbose && overrun > 0)
fprintf('%d samples overrun ...\n', overrun);
end
q = compFilt(accel, gyro, mag);
update(tuner, q);
if useHW
if toc >= runTime
break;
end
else
if idx(end) > numSamplesAccelGyroMag
break;
end
end
end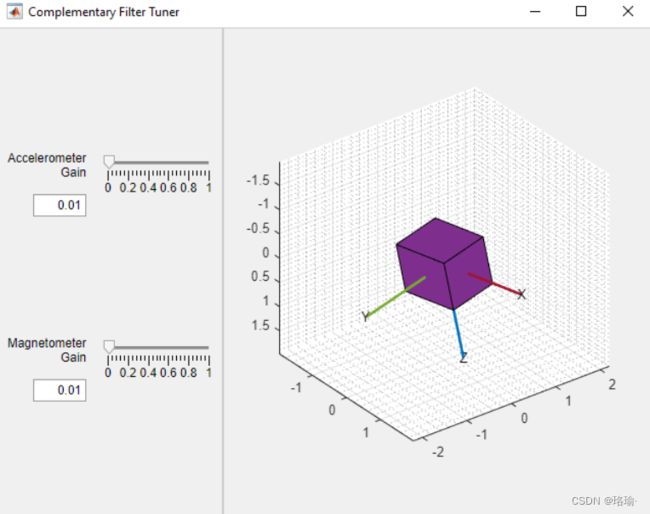
六、总结
此示例展示了如何使用来自 Arduino 和互补滤波器的数据估计 IMU 的方向。此示例还展示了如何配置 IMU,并讨论了调整互补滤波器参数的效果。
七、程序
使用Matlab R2022b版本,点击打开。

打开下面的“EstimateOrientation...Example.m”文件,点击运行,就可以看到上述效果。
关注下面公众号,后台回复关键词:互补滤波器和IMU数据估计方向,发送源码链接。