在Ubuntu20.04系统上LIO-SAM跑KITTI数据集和自己数据集代码修改
LIO-SAM跑KITTI数据集和自己数据集代码修改
- 一、编译并运行LIO-SAM
- 二、代码修改
-
- 1、cloud_info.msg
- 2、imageProjection.cpp
- 三、KITTI数据集准备
- 四、自己数据集准备
- 五、修改配置文件params.yaml
- 六、GPS信息的添加
- 七、效果图
- 八、轨迹保存
- 九、点云地图保存(PCD)
-
- 1、注意到save_map.srv文件
- 2、进入到mapOptmization.cpp
- 3、最后在配置文件params.yaml修改参数
- 4、PCD效果展示
- 全文参考文献
一、编译并运行LIO-SAM
参考我的另一篇文章:
Ubuntu20.04下的编译与运行LIO-SAM【问题解决】
二、代码修改
因为liosam 要求输入的点云每个点都有ring 信息和相对时间time信息,目前的雷达驱动基本具备这些信息,但是早期的KITTI数据集不具备,所以代码要自己计算一下 ring和time。方法可以参考lego-loam中这部分内容,具体修改如下。
1、cloud_info.msg
添加
# 用于改写ring和time相关
float32 startOrientation
float32 endOrientation
float32 orientationDiff
2、imageProjection.cpp
ring部分:
1、把ring通道强制关闭
2、添加计算ring代码
if (false){
rowIdn = laserCloudIn->points[i].ring;
} else {
verticalAngle = atan2(thisPoint.z, sqrt(thisPoint.x * thisPoint.x + thisPoint.y * thisPoint.y)) * 180 / M_PI;
// 拿16、32、64线激光雷达为例
if(N_SCAN == 16) {
rowIdn = int((verticalAngle + 15) / 2 + 0.5);
if (rowIdn < 0 || rowIdn >= N_SCAN)
{
continue;
} else if(rowIdn % downsampleRate != 0) {
continue;
}
} else if (N_SCAN == 32) {
rowIdn = int((verticalAngle + 92.0 / 3.0) * 3.0 / 4.0);
if (rowIdn < 0 || rowIdn >= N_SCAN)
{
continue;
} else if(rowIdn % downsampleRate != 0) {
continue;
}
} else if (N_SCAN == 64) {
if (verticalAngle >= -8.83) {
rowIdn = int((2 - verticalAngle) * 3.0 + 0.5);
} else {
rowIdn = N_SCAN / 2 + int((-8.83 - verticalAngle) * 2.0 + 0.5);
}
// use [0 50] > 50 remove outlies
if (verticalAngle > 2 || verticalAngle < -24.33 || rowIdn > 50 || rowIdn < 0)
{
continue;
} else if(rowIdn % downsampleRate != 0) {
continue;
}
} else {
printf("wrong scan number\n");
ROS_BREAK();
}
}
time部分:
1、把time通道强制关闭
2、计算time并赋值
bool halfPassed = false;
int cloudNum = laserCloudIn->points.size();
// start and end orientation of this cloud
cloudInfo.startOrientation = -atan2(laserCloudIn->points[0].y, laserCloudIn->points[0].x);
cloudInfo.endOrientation = -atan2(laserCloudIn->points[laserCloudIn->points.size() - 1].y, laserCloudIn->points[laserCloudIn->points.size() - 1].x) + 2 * M_PI;
if (cloudInfo.endOrientation - cloudInfo.startOrientation > 3 * M_PI) {
cloudInfo.endOrientation -= 2 * M_PI;
} else if (cloudInfo.endOrientation - cloudInfo.startOrientation < M_PI) {
cloudInfo.endOrientation += 2 * M_PI;
}
cloudInfo.orientationDiff = cloudInfo.endOrientation - cloudInfo.startOrientation;
PointType point;
for (int i = 0; i < cloudNum; ++i)
{
point.x = laserCloudIn->points[i].x;
point.y = laserCloudIn->points[i].y;
point.z = laserCloudIn->points[i].z;
float ori = -atan2(point.y, point.x);
if (!halfPassed) {
if (ori < cloudInfo.startOrientation - M_PI / 2) {
ori += 2 * M_PI;
} else if (ori > cloudInfo.startOrientation + M_PI * 3 / 2) {
ori -= 2 * M_PI;
}
if (ori - cloudInfo.startOrientation > M_PI) {
halfPassed = true;
}
} else {
ori += 2 * M_PI;
if (ori < cloudInfo.endOrientation - M_PI * 3 / 2) {
ori += 2 * M_PI;
} else if (ori > cloudInfo.endOrientation + M_PI / 2) {
ori -= 2 * M_PI;
}
}
float relTime = (ori - cloudInfo.startOrientation) / cloudInfo.orientationDiff;
// 激光雷达10Hz,周期0.1
laserCloudIn->points[i].time = 0.1 * relTime;
}
需要修改好的,可以查看我的。
三、KITTI数据集准备
关于KITTI数据集,已有公开的kitti2bag工具,使用方法:参见我的另一个博客在Ubuntu20.04系统上将KITTI原始数据集转化为.bag形式。但是输出的bag文件liosam是不能正常跑的,位姿Z型突变,仔细了解一下发现这个bag的imu频率跟雷达一样,也就是很低频,无法满足代码需求。liosam作者提供了一个2011_09_30_drive_0028.bag在google drive,但可能无法快速下载。
如果想自己制作bag,作者自己改了kitti2bag就在源码的文件夹下,你需要准备如下文件(文件位置需对应):


首先,在终端输入以下指令:
pip3 install tqdm
效果:

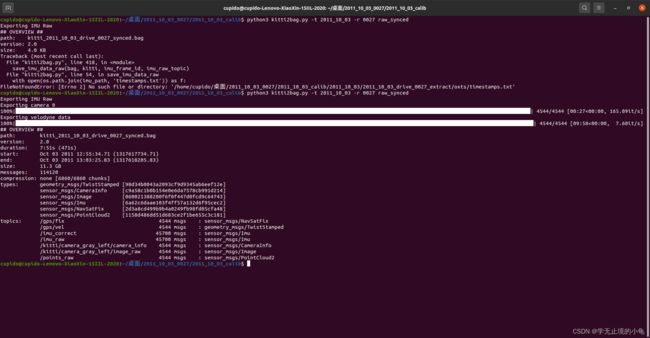
然后,在"2011_10_03"文件夹的上一级目录(即:此处的2011_10_03_calib文件下),打开终端,输入:
python3 kitti2bag.py -t 2011_10_03 -r 0027 raw_synced
注意自己的文件的文件名
效果如下:
我第一次文件位置不对,导致无法生成bag文件
四、自己数据集准备
具体采集步骤在后续更新…
五、修改配置文件params.yaml
1、话题名修改
# Topics
pointCloudTopic: "points_raw" # Point cloud data
imuTopic: "imu_raw" # IMU data
2、根据KITTI采集数据的实际传感器修改对应参数
# KITTI
sensor: velodyne # lidar sensor type, either 'velodyne' or 'ouster'
N_SCAN: 64 # number of lidar channel (i.e., 16, 32, 64, 128)
Horizon_SCAN: 2083 # lidar horizontal resolution (Velodyne:1800, Ouster:512,1024,2048)
downsampleRate: 1 # default: 1. Downsample your data if too many points. i.e., 16 = 64 / 4, 16 = 16 / 1
lidarMinRange: 1.0 # default: 1.0, minimum lidar range to be used
lidarMaxRange: 1000.0 # default: 1000.0, maximum lidar range to be used
对照我的另一个博客:LeGO-LOAM跑KITTI数据集评估方法【代码改】
3、外参的修改
# kitti外参
extrinsicTrans: [-8.086759e-01, 3.195559e-01, -7.997231e-01]
extrinsicRot: [9.999976e-01, 7.553071e-04, -2.035826e-03,
-7.854027e-04, 9.998898e-01, -1.482298e-02,
2.024406e-03, 1.482454e-02, 9.998881e-01]
extrinsicRPY: [9.999976e-01, 7.553071e-04, -2.035826e-03,
-7.854027e-04, 9.998898e-01, -1.482298e-02,
2.024406e-03, 1.482454e-02, 9.998881e-01]
注意点:
1、配置文件(params.yaml)内的参数通过参数服务器传送进源程序,会覆盖掉头文件内(utility.h)的对应参数。
2、其中extrinsicRot表示imu -> lidar的坐标变换,用于旋转imu坐标系下的角速度和线加速度到lidar坐标系下,extrinsicRPY则用于旋转imu坐标系下的欧拉角(姿态信息)到lidar坐标下,由于lio-sam作者使用的imu的欧拉角旋转指向与lidar坐标系不一致,因此使用了两个不同的旋转矩阵,但是大部分的设备两个旋转应该是设置为相同的。
六、GPS信息的添加
待更新…
七、效果图
KITTI:
00的可能会飞,05以后的应该没问题
八、轨迹保存
找到输出位姿信息,通过以下代码,输出位姿信息(KITTI格式):
// 位姿输出到txt文档
std::ofstream pose1("/home/cupido/output-data/lio-sam/pose.txt", std::ios::app);
pose1.setf(std::ios::scientific, std::ios::floatfield);
// pose1.precision(15);
//save final trajectory in the left camera coordinate system.
Eigen::Matrix3d rotation_matrix;
rotation_matrix = Eigen::AngleAxisd(pose_in.yaw, Eigen::Vector3d::UnitZ()) *
Eigen::AngleAxisd(pose_in.pitch, Eigen::Vector3d::UnitY()) *
Eigen::AngleAxisd(pose_in.roll, Eigen::Vector3d::UnitX());
Eigen::Matrix<double, 4, 4> mylio_pose;
mylio_pose.topLeftCorner(3,3) = rotation_matrix;
mylio_pose(0,3) = pose_in.x;
mylio_pose(1,3) = pose_in.y;
mylio_pose(2,3) = pose_in.z;
Eigen::Matrix<double, 4, 4> cali_paremeter;
/*cali_paremeter << 4.276802385584e-04, -9.999672484946e-01, -8.084491683471e-03, -1.198459927713e-02, //00-02
-7.210626507497e-03, 8.081198471645e-03, -9.999413164504e-01, -5.403984729748e-02,
9.999738645903e-01, 4.859485810390e-04, -7.206933692422e-03, -2.921968648686e-01,
0, 0, 0, 1;*/
/*cali_paremeter << -1.857739385241e-03,-9.999659513510e-01, -8.039975204516e-03, -4.784029760483e-03,
-6.481465826011e-03, 8.051860151134e-03, -9.999466081774e-01, -7.337429464231e-02,
9.999773098287e-01, -1.805528627661e-03, -6.496203536139e-03, -3.339968064433e-01, //04-10
0 0, 0, 1;*/
cali_paremeter << 2.347736981471e-04, -9.999441545438e-01, -1.056347781105e-02, -2.796816941295e-03,
1.044940741659e-02, 1.056535364138e-02, -9.998895741176e-01, -7.510879138296e-02,
9.999453885620e-01, 1.243653783865e-04, 1.045130299567e-02, -2.721327964059e-01,
0, 0, 0, 1;
Eigen::Matrix<double, 4, 4> myloam_pose_f;
myloam_pose_f = cali_paremeter * mylio_pose * cali_paremeter.inverse();
pose1 << myloam_pose_f(0,0) << " " << myloam_pose_f(0,1) << " " << myloam_pose_f(0,2) << " " << myloam_pose_f(0,3) << " "
<< myloam_pose_f(1,0) << " " << myloam_pose_f(1,1) << " " << myloam_pose_f(1,2) << " " << myloam_pose_f(1,3) << " "
<< myloam_pose_f(2,0) << " " << myloam_pose_f(2,1) << " " << myloam_pose_f(2,2) << " " << myloam_pose_f(2,3) << std::endl;
pose1.close();
欧拉角到四元素的转换除了用eigen,还可以参考大佬:四元数与欧拉角(Yaw、Pitch、Roll)的转换
补充tum格式的轨迹输出(拿ALOAM举例,LIO-SAM修改相关参数即可)
// 位姿输出到txt文档
std::ofstream pose1("/home/cupido/output-data/kitti/sequences/07/aloam.txt", std::ios::app);
pose1.setf(std::ios::scientific, std::ios::floatfield);
pose1.precision(15);
//save final trajectory in the left camera coordinate system.
Eigen::Matrix3d rotation_matrix;
rotation_matrix = q_w_curr.toRotationMatrix();
Eigen::Matrix<double, 4, 4> myaloam_pose;
myaloam_pose.topLeftCorner(3,3) = rotation_matrix;
myaloam_pose(0,3) = t_w_curr.x();
myaloam_pose(1,3) = t_w_curr.y();
myaloam_pose(2,3) = t_w_curr.z();
Eigen::Matrix<double, 4, 4> cali_paremeter;
// cali_paremeter << 4.276802385584e-04, -9.999672484946e-01, -8.084491683471e-03, -1.198459927713e-02, //00-02
// -7.210626507497e-03, 8.081198471645e-03, -9.999413164504e-01, -5.403984729748e-02,
// 9.999738645903e-01, 4.859485810390e-04, -7.206933692422e-03, -2.921968648686e-01,
// 0, 0, 0, 1;
cali_paremeter << -1.857739385241e-03,-9.999659513510e-01, -8.039975204516e-03, -4.784029760483e-03, //04-10
-6.481465826011e-03, 8.051860151134e-03, -9.999466081774e-01, -7.337429464231e-02,
9.999773098287e-01, -1.805528627661e-03, -6.496203536139e-03, -3.339968064433e-01,
0, 0, 0, 1;
/*cali_paremeter << 2.347736981471e-04, -9.999441545438e-01, -1.056347781105e-02, -2.796816941295e-03, // 03
1.044940741659e-02, 1.056535364138e-02, -9.998895741176e-01, -7.510879138296e-02,
9.999453885620e-01, 1.243653783865e-04, 1.045130299567e-02, -2.721327964059e-01,
0, 0, 0, 1;*/
Eigen::Matrix<double, 4, 4> myloam_pose_f;
myloam_pose_f = cali_paremeter * myaloam_pose * cali_paremeter.inverse();
Eigen::Matrix3d temp;
temp = myloam_pose_f.topLeftCorner(3,3);
Eigen::Quaterniond quaternion(temp);
// 获取当前更新的时间 这样与ground turth对比才更准确
static double timeStart = odometryBuf.front()-> header.stamp.toSec(); // 相当于是第一帧的时间
auto T1 = ros::Time().fromSec(timeStart);
pose1 << odomAftMapped.header.stamp - T1 << " "
<< myloam_pose_f(0,3) << " "
<< myloam_pose_f(1,3) << " "
<< myloam_pose_f(2,3) << " "
<< quaternion.x() << " "
<< quaternion.y() << " "
<< quaternion.z() << " "
<< quaternion.w() << std::endl;
pose1.close();
注意点:
1、输出路径注意修改
2、评估轨迹精度的时候,输出轨迹若发现未和真值完全对齐(这里指的是,不考虑自己算法精度,单纯两轨迹对齐),可以在终端输入以下指令:
//(注意是-a,不是--align_origin)
evo_ape tum groundtruth.txt xxx.txt -a -p
九、点云地图保存(PCD)
追根溯源:
1、注意到save_map.srv文件
float32 resolution
string destination
---
bool success
2、进入到mapOptmization.cpp
相关代码:
// 订阅一个保存地图功能的服务
srvSaveMap = nh.advertiseService("lio_sam/save_map", &mapOptimization::saveMapService, this);
/**
* 保存全局关键帧特征点集合
*/
bool saveMapService(lio_sam::save_mapRequest& req, lio_sam::save_mapResponse& res)
{
string saveMapDirectory;
cout << "****************************************************" << endl;
cout << "Saving map to pcd files ..." << endl;
// 如果是空,说明是程序结束后的自动保存,否则是中途调用ros的service发布的保存指令
if(req.destination.empty()) saveMapDirectory = std::getenv("HOME") + savePCDDirectory;
else saveMapDirectory = std::getenv("HOME") + req.destination;
cout << "Save destination: " << saveMapDirectory << endl;
// create directory and remove old files;
// 删掉之前有可能保存过的地图
int unused = system((std::string("exec rm -r ") + saveMapDirectory).c_str());
unused = system((std::string("mkdir -p ") + saveMapDirectory).c_str());
// save key frame transformations
// 首先保存历史关键帧轨迹
pcl::io::savePCDFileBinary(saveMapDirectory + "/trajectory.pcd", *cloudKeyPoses3D);
pcl::io::savePCDFileBinary(saveMapDirectory + "/transformations.pcd", *cloudKeyPoses6D);
// extract global point cloud map(提取历史关键帧角点、平面点集合)
pcl::PointCloud<PointType>::Ptr globalCornerCloud(new pcl::PointCloud<PointType>());
pcl::PointCloud<PointType>::Ptr globalCornerCloudDS(new pcl::PointCloud<PointType>());
pcl::PointCloud<PointType>::Ptr globalSurfCloud(new pcl::PointCloud<PointType>());
pcl::PointCloud<PointType>::Ptr globalSurfCloudDS(new pcl::PointCloud<PointType>());
pcl::PointCloud<PointType>::Ptr globalMapCloud(new pcl::PointCloud<PointType>());
// 遍历所有关键帧,将点云全部转移到世界坐标系下去
for (int i = 0; i < (int)cloudKeyPoses3D->size(); i++) {
*globalCornerCloud += *transformPointCloud(cornerCloudKeyFrames[i], &cloudKeyPoses6D->points[i]);
*globalSurfCloud += *transformPointCloud(surfCloudKeyFrames[i], &cloudKeyPoses6D->points[i]);
// 类似进度条的功能
cout << "\r" << std::flush << "Processing feature cloud " << i << " of " << cloudKeyPoses6D->size() << " ...";
}
// 如果没有指定分辨率,就是直接保存
if(req.resolution != 0)
{
cout << "\n\nSave resolution: " << req.resolution << endl;
// down-sample and save corner cloud
// 使用指定分辨率降采样,分别保存角点地图和面点地图
downSizeFilterCorner.setInputCloud(globalCornerCloud);
downSizeFilterCorner.setLeafSize(req.resolution, req.resolution, req.resolution);
downSizeFilterCorner.filter(*globalCornerCloudDS);
pcl::io::savePCDFileBinary(saveMapDirectory + "/CornerMap.pcd", *globalCornerCloudDS);
// down-sample and save surf cloud
downSizeFilterSurf.setInputCloud(globalSurfCloud);
downSizeFilterSurf.setLeafSize(req.resolution, req.resolution, req.resolution);
downSizeFilterSurf.filter(*globalSurfCloudDS);
pcl::io::savePCDFileBinary(saveMapDirectory + "/SurfMap.pcd", *globalSurfCloudDS);
}
else
{
// save corner cloud
pcl::io::savePCDFileBinary(saveMapDirectory + "/CornerMap.pcd", *globalCornerCloud);
// save surf cloud
pcl::io::savePCDFileBinary(saveMapDirectory + "/SurfMap.pcd", *globalSurfCloud);
}
// save global point cloud map(保存到一起,全局关键帧特征点集合)
*globalMapCloud += *globalCornerCloud;
*globalMapCloud += *globalSurfCloud;
// 保存全局地图
int ret = pcl::io::savePCDFileBinary(saveMapDirectory + "/GlobalMap.pcd", *globalMapCloud);
res.success = ret == 0;
downSizeFilterCorner.setLeafSize(mappingCornerLeafSize, mappingCornerLeafSize, mappingCornerLeafSize);
downSizeFilterSurf.setLeafSize(mappingSurfLeafSize, mappingSurfLeafSize, mappingSurfLeafSize);
cout << "****************************************************" << endl;
cout << "Saving map to pcd files completed\n" << endl;
return true;
}
std::thread visualizeMapThread(&mapOptimization::visualizeGlobalMapThread, &MO); // 可视化的线程(负责rviz相关可视化接口的发布)
visualizeMapThread.join();
/**
* 展示线程
* 1、发布局部关键帧map的特征点云
* 2、保存全局关键帧特征点集合
*/
// 全局可视化线程
void visualizeGlobalMapThread()
{
// 更新频率设置为0.2hz
ros::Rate rate(0.2);
while (ros::ok()){
rate.sleep();
// 发布局部关键帧map的特征点云
publishGlobalMap();
}
// 当ros被杀死之后,执行保存地图功能
if (savePCD == false)
return;
lio_sam::save_mapRequest req;
lio_sam::save_mapResponse res;
// 保存全局关键帧特征点集合
if(!saveMapService(req, res)){
cout << "Fail to save map" << endl;
}
}
这里注意到 if (savePCD == false)判断条件,转至配置文件params.yaml
3、最后在配置文件params.yaml修改参数
打开开关:
savePCD: true # https://github.com/TixiaoShan/LIO-SAM/issues/3
更改路径:
savePCDDirectory: "/output-data/lio-sam/PCD/" # in your home folder, starts and ends with "/". Warning: the code deletes "LOAM" folder then recreates it. See "mapOptimization" for implementation
对应路径和自身电脑的全局路径的关系如下:
4、PCD效果展示
1、指令:
pcl_viewer xxx.pcd
2、效果图:
此节参考大佬:
1、lio-sam中点云地图保存
2、复现lio_sam激光slam算法创建点云地图
3、PCL保存LIO-SAM地图时报错[pcl::PCDWriter::writeBinary]
全文参考文献
1、ubuntu18运行编译LIO-SAM并用官网和自己的数据建图(修改汇总)
2、LIO-SAM运行自己数据包遇到的问题解决–SLAM不学无数术小问题
3、使用开源激光SLAM方案LIO-SAM运行KITTI数据集,如有用,请评论雷锋
4、LIO-SAM:配置环境、安装测试、适配⾃⼰采集数据集
5、SLAM学习笔记(十九)开源3D激光SLAM总结大全——Cartographer3D,LOAM,Lego-LOAM,LIO-SAM,LVI-SAM,Livox-LOAM的原理解析及区别
6、多传感器融合定位 第六章 惯性导航结算及误差模型