机器学习:奇异值分解(SVD)详细讲解
机器学习:奇异值分解(SVD)
- 预备知识
-
- 正交矩阵
- 逆矩阵
- 对称矩阵
-
- 对称矩阵对角化
- 线性变换
-
- 伸缩
- 旋转
- 特征值分解
-
- 代码实现
- 奇异值分解分解(SVD)
-
- SVD推导
- SVD计算案例
- SVD代码实现
- SVD的应用
预备知识
正交矩阵

- 正交矩阵的每一个行向量与其他行向量相互垂直(内积=0),每一个列向量与其他列向量相互垂直。
- 行向量或者列向量他与本身的内积=1,也就是长度=1(单位向量)。
- 正交矩阵的逆矩阵=它的转置矩阵
逆矩阵
设A是一个n阶矩阵,若存在另一个n阶矩阵B,使得: AB=BA=E ,则称方阵A可逆,并称方阵B是A的逆矩阵。
对称矩阵
对称矩阵(Symmetric Matrix)是指元素以主对角线为对称轴对应相等的矩阵,例如:

他的转置等于它本身。
对称矩阵对角化
如果一个对称矩阵是实对称矩阵,就会存在正交矩阵P,与对角矩阵满足下列等式:

然后我们对等式两边左乘P,右乘P的逆矩阵,就会得到:

又因为正交矩阵的转置=它的逆矩阵,所以对称矩阵的对角化如下:

线性变换
伸缩

一个矩阵其实就是一个线性变换,因为一个矩阵乘以一个向量后得到的向量,其实就相当于将这个向量进行了线性变换。比如说下面的一个矩阵:

因为这个矩阵M乘以一个向量(x,y)的结果是:

旋转

除了伸缩变换,也可以进行旋转变换。
上面的矩阵是对称的,所以这个变换是一个对x,y轴的方向一个拉伸变换(每一个对角线上的元素将会对一个维度进行拉伸变换,当值>1时,是拉长,当值<1时时缩短),当矩阵不是对称的时候,假如说矩阵是下面的样子:

特征值分解
特征值分解可以得到特征值与特征向量,特征值表示的是这个特征到底有多重要,而特征向量表示这个特征的方向。
如果说一个向量v是一个方阵A的特征向量,将一可以表示成下面形式
A v = λ v Av=\lambda v Av=λv
λ \lambda λ为特征向量v的特征值,特征值分解是将一个矩阵分解为如下形式:
A = Q ∑ Q − 1 A=Q\sum Q^{-1} A=Q∑Q−1
其中Q是这个矩阵A的特征向量所组成的矩阵, ∑ \sum ∑是一个对角矩阵,每一个对角线元素就是一个特征值,里面的特征值有大到小排列,这些特征值所对应的特征向量就是描述这个矩阵变化方向,(从主要的变化到次要的变化排序)。也就是说矩阵A的信息可以由其特征值和特征向量表示。
对于矩阵为高纬的情况下,那么这个矩阵就是高维空间下的一个线性变换,可以想像,这个变化也同样有很多的变换方向,我们通过特征值分解得到的前N个特征向量,那就对应了这个矩阵最主要的N个变化方向,我们利用这前N个变化方向,就可以近似这个矩阵(变换)。
代码实现
import numpy as np
A = np.array([[1, 2, 3], [4, 5, 6], [7, 8, 9]])
V, U = np.linalg.eig(A)
print(V)
print(U)
奇异值分解分解(SVD)
上面我们描述了特征值分解,但是他有一个弊端,就是被分解的矩阵只能是方阵,而SVD则可以分解任何矩阵。
SVD推导
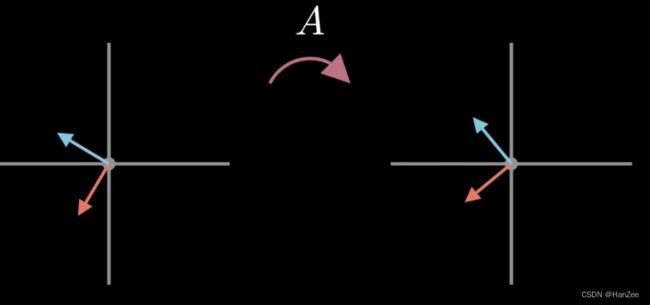
假设我们要找到一组正交的向量v1 v2,它们归一化并通过矩阵A线性变换后得到y1 ,y2,其中y1,y2继续保持正交。
就有如下公式:
之后我们把 y1,y2写成 σ ∗ u \sigma*u σ∗u其中sigma表示向量方向,u表示向量大小。
为让表达式更通用,我们把它写成矩阵的形式:
用大写字母表示:
因为V矩阵是正交矩阵,它的逆矩阵=转置矩阵,然后把等式两边同乘V的逆矩阵,就得到SVD的标准形式:

SVD计算案例
-
计算:
A T ∗ A A^T*A AT∗A
= ( U ∑ V T ) T ∗ U ∑ V T =(U\sum V^T)^T*U\sum V^T =(U∑VT)T∗U∑VT
= V ∑ U T U ∑ V T =V\sum U^T U\sum V^T =V∑UTU∑VT
= V ∑ 2 V T =V\sum^2 V^T =V∑2VT -
A ∗ A T A*A^T A∗AT
= U ∑ V T ∗ ( U ∑ V T ) T =U\sum V^T*(U\sum V^T)^T =U∑VT∗(U∑VT)T
= U ∑ V T V ∑ U T =U\sum V^T V\sum U^T =U∑VTV∑UT
= U ∑ 2 U T =U\sum^2 U^T =U∑2UT
又因为A的转置乘A是对称矩阵,所以我们可以利用对称矩阵对角化,对上述结果进行特征值分解。
我们就可以计算出U、V与 ∑ 2 \sum^2 ∑2,之后在开根号,就可以得到奇异值。
SVD代码实现
import numpy as np
A = np.array([[1, 2, 3], [4, 5, 6], [7, 8, 9]])
u,sigma,v = np.linalg.svd(A)
print(u)
print(sigma)
print(v)
SVD的应用
- 图像压缩
- 推荐系统
- 图像去噪
- 计算伪逆