将前端技术栈移植到掌上游戏机

https://juejin.im/post/5df89b96518825125b21d0f6
前端工程师,我们编写的代码只能活在浏览器、小程序或者 Node 进程里,这似乎已经成为了一种常识。但这就是我们的能力边界了吗?本文将带你为一台内存仅 32M,分辨率仅 320x240 的掌上游戏机适配前端工具链,见证 Web 技术栈的全新可能性。
本次我们的目标,是只配备了 400Mhz 单核 CPU 和 32M 内存的国产怀旧掌机 Miyoo。它固然完全无法与现在的 iOS 和安卓手机相提并论,但却能很好地在小巧精致的体积下,满足玩小霸王、GBA、街机等经典游戏平台模拟器的需求,价格也极为低廉。这是它和 iPad mini 的对比图:

那么,怎样才算是为它移植了一套前端技术栈呢?我个人的理解里,这至少包括这么几部分:
构建环境 - 应用编译工具链
运行时 - 嵌入式 JS 引擎
调试环境 - IDE 或编辑器支持
下面将逐一介绍为完成这三大部分的移植,我所做的一些技术探索。这主要包括:
搭建 Docker 工具链
走通 Hello World
焊接排针与串口登录
定制 Linux 内核驱动
移植 JS 引擎
支持 VSCode 调试器
Let’s rock!
搭建 Docker 工具链
入门嵌入式开发时我们首先应该做到的,就是将源码编译为嵌入式操作系统上的应用。那么 Miyoo 掌机的操作系统是什么呢?这里首先有一段故事。
Miyoo 是个国内小公司基于全志 F1C500S 芯片方案定制的掌机,其默认的操作系统是闭源的 Melis OS,在国外以 Bittboy 和 Pocket Go 的名义销售,小有名气。闭源系统自然不能满足爱好者的需求,因此社区对其进行了逆向工程。来自台湾的前辈司徒 (Steward Fu) 成功将 Linux 移植到了这台掌机上,但可惜他已因个人原因退出了开发。现在这台游戏机的开源系统 MiyooCFW 基于司徒最早移植的 Linux 4.14 内核,由社区维护。
因此,我们的目标系统既不是 iOS 也不是安卓,而是原汁原味的 Linux!如何为嵌入式 Linux 编译应用呢?我们需要一套由编译器、汇编器、链接器等基础工具组成的工具链,以构建出可用的 ARM 二进制程序。
在各个操作系统上搭建开发环境,往往相当繁琐。现在开源掌机社区中流行的方式是使用 VirtualBox 等 Linux 虚拟机。这基本解决了工具链的跨平台问题,但还没有达到现代前端工程的开发便利度。因此我选择首先引入 Docker,来实现跨平台开箱即用的开发环境。
我们知道,Docker 容器可以理解为更轻量的虚拟机。我们只要一句 docker run 命令就能运行容器,并为其挂载文件、网络等外部资源。显然,现在我们需要的是一个【能编译出嵌入式 Linux 应用】的 Docker 容器,这可以通过制作出一个用于启动容器的基准 Docker 镜像来实现。Docker 镜像很容易跨平台分发,因此只要制作并上传镜像,基础的开发环境就做好了。
那么,这个 Docker 镜像中应该包含什么内容呢?显然就是编译嵌入式应用的工具链了。司徒已为社区提供了一套在 Debian 9 上预编译好的工具链包,只需要将其解压到 /opt/miyoo 目录下,再安装一些常见依赖,就可以完成镜像的制作了。这一过程可以通过 Dockerfile 文件来自动化,其内容如下所示:
FROM debian:9
ADD toolchain.tar.gz /opt
ENV PATH="${PATH}:/opt/miyoo/bin"
ENV ARCH="arm"
ENV CROSS_COMPILE="arm-miyoo-linux-uclibcgnueabi-"
RUN apt-get update && apt-get install -y \
build-essential \
bc \
libncurses5-dev \
libncursesw5-dev \
libssl-dev \
&& rm -rf /var/lib/apt/lists/*
WORKDIR /root
这样只要用 docker build 命令,我们就能用纯净的 Debian 镜像制作出纯净的嵌入式开发镜像了。那么接下来又该如何用镜像编译文件呢?假设我们做好了 miyoo_sdk 镜像,那么只要将本地的文件系统目录,挂载到基于镜像所启动的容器上即可。像这样:
docker run -it --rm -v `pwd`:/root miyoo_sdk
简单说来,这条命令的意义是这样的:
docker run基于miyoo_sdk镜像启动一个临时容器-v将当前目录挂载到容器的/root下-it让我们用当前终端来登录操作容器的 Shell--rm使容器用完即弃,除更改当前目录外,不留任何痕迹
因此,我们实际上基于 Docker,直接在容器里编译了 Mac 文件系统上的源码。这既没有副作用,也不需要其他数据传递操作。对于日益复杂的前端工具链依赖问题,我相信这也是一种解决方案,有机会可以单独撰文详述。
走通 Hello World
Docker 镜像制作好之后,我们就能用上容器里 arm-linux-gcc 这样的编译器了。那么该怎么编译出一个 Hello World 呢?现在还没到引入 JS 引擎的时候,先用 C 语言写出个简单的例子,验证一切都能正常工作吧。
嵌入式 Linux 设备常用 SDL 库来渲染基础的 GUI,其最简单的示例如下所示,是不是和前端同学们熟悉的 Canvas 有些神似呢:
#include
#include
int main(int argc, char* args[])
{
printf("Init!\n");
SDL_Surface* screen;
screen = SDL_SetVideoMode(320, 240, 16, SDL_HWSURFACE | SDL_DOUBLEBUF);
SDL_ShowCursor(0);
// 填充红色
SDL_FillRect(screen, &screen->clip_rect, SDL_MapRGB(screen->format, 0xff, 0x00, 0x00));
// 交换一次缓冲区
SDL_Flip(screen);
SDL_Delay(10000);
SDL_Quit();
return 0;
}
这份 C 源码可以通过我们的 Docker 环境编译出来。但显然稍有规模的应用都不应该直接敲 gcc 那堆参数来直接构建,通过像这样的 Makefile 来自动化比较好(注意缩进必须用 tab 哦):
all:
arm-linux-gcc main.c -o demo.out -ggdb -lSDL -I/opt/miyoo/arm-miyoo-linux-uclibcgnueabi/sysroot/usr/include/SDL
clean:
rm -rf demo.out
除了登陆 Docker 容器的 Shell 之外,我们还可以通过 -d 参数轻松地创建「无头」的容器,在后台帮你编译。像构建这个 Makefile 所需的 make 命令,就可以在 Mac 终端里这样一行搞定:
docker run -d --rm -v `pwd`:/root miyoo_sdk make
这样就能生成 demo.out 二进制文件啦。将这个仅有 12KB 的文件复制到 Miyoo TF 卡里的 /apps 目录里后,再用 Miyoo 自带的程序安装器打开它,就能看到这样的结果了:

这说明 Docker 编译工具链已经正常工作了!但这还远远不够,现在的关键问题在于,我们的 printf 去哪了?
焊接排针与串口登录
基础的 Unix 知识告诉我们,进程的输出是默认写到 stdout 这个标准输出文件里的。一般来说,这些输出都会写入流式的缓冲区,进而绘制到终端上。但是,嵌入式设备的终端在哪里呢?一般来说,这些日志写入的是所谓的 Serial Console 串口控制台。而这种控制台的数据,则可以通过非常古老的 UART 传输器来和 PC 交互,只需要接上三条电路的连线就行。
因此,我们需要想办法接通 Miyoo 的 UART 接口,从而才能在电脑上登陆它的 Shell。在这方面,司徒的 焊接 UART 接頭 这篇文章是非常好的参考资料。我对其中的一句话印象尤其深刻:
廠商真是貼心,特別把 GND、UART1 RX、UART1 TX(由上而下)拉出來,提供開發者一個友好的開發界面
拆机焊接才能用的东西,在大佬眼里居然算是友好的开发界面…好吧,不就是焊接吗?现学就是了。
首先我们把后盖拆开,再把主板卸下来。这步只需要标准的十字螺丝刀,注意别弄丢小零件就行。完成后像这样:

看到图中主板右上角的三根针了吗?这就是 UART 的三个接口了(这时我还没焊接,只是把排针摆上去了而已)。它们自上而下分别是 GND、RX 和 TX,只要为它们焊接好排针,将导线连到 UART 转 USB 转换器,就能在 Mac 上登陆它啦。连接顺序是这样的:
Miyoo 的 GND 接转换器的 GND
Miyoo 的 RX 接转换器的 TX
Miyoo 的 TX 接转换器的 RX
所以,我们需要先焊上排针。焊接看起来很折腾,现学起来倒并不难,其实只要先把烙铁头压在焊点上,然后把焊锡丝放上去就行。像我这样的新手,还可以买一些白菜价的练习板,拿几个二极管练练手后再焊真的板子。完成后的效果如下所示,多了三根红色排针(焊点在背面,很丑就不放图了):

焊好以后,用万用表即可测量焊点是否接通。还记得高中物理里万用表的红黑表笔怎么连接吗…反正我早就忘光了,也是现学的。实际测得 RX 和 TX 各自到 GND 的电阻值都在 600 欧姆左右,就代表连接畅通了。
加上转接头,连好之后的效果是这样的:

最后我为了能把机器装回去,又在后盖上打了个洞,像这样:

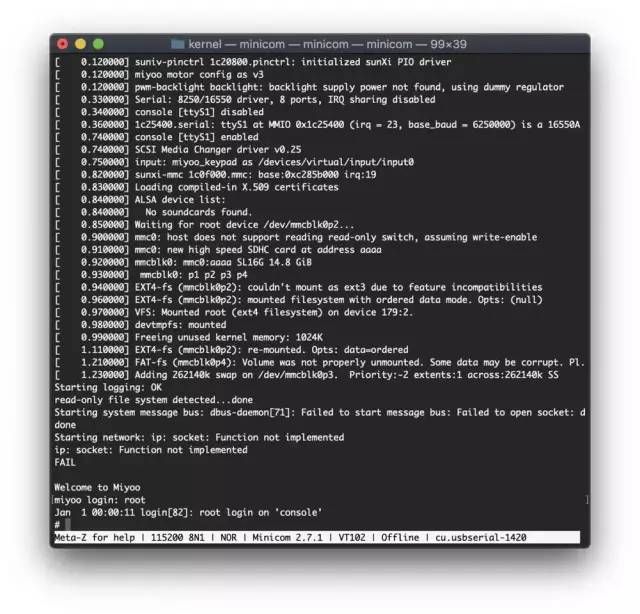
做完这个硬件改造之后,该如何实现软件上的连接呢?这就需要能够登陆串口的软件了。Unix 里一切皆文件,因此我们只要找到 /dev 目录下的串口文件,然后用串口通信软件打开这个文件就行啦。screen 是 Mac 内置的命令行会话软件,但用起来较为麻烦,这里推荐 Mac 用户使用更方便的 minicom。连接好之后,能看到形如这样的登陆日志输出:
[ 1.000000] devtmpfs: mounted
[ 1.010000] Freeing unused kernel memory: 1024K
[ 1.130000] EXT4-fs (mmcblk0p2): re-mounted. Opts: data=ordered
[ 1.230000] FAT-fs (mmcblk0p4): Volume was not properly unmounted. Some data may be corrupt. Ple.
[ 1.250000] Adding 262140k swap on /dev/mmcblk0p3. Priority:-2 extents:1 across:262140k SS
Starting logging: OK
read-only file system detected...done
Starting system message bus: dbus-daemon[72]: Failed to start message bus: Failed to open socket: Fd
done
Starting network: ip: socket: Function not implemented
ip: socket: Function not implemented
FAIL
Welcome to Miyoo
miyoo login:
看起来已经接近成功,可以 login 进去看日志了吧?结果一个 bug 拦住了我:所有按键按下去都没反应,完全登陆不了终端,怎么办?
我从来没做过这种层面的硬件改造,也没用过 UART 串口。因此这个问题对我相当棘手——既可能是硬件问题,也可能是软件问题。但总该是个可以解决的问题吧。
首先软件上,我反复确认了串口通信软件的配置,并梳理了 Linux 启动时的相关配置流程,将机器 EXT4 格式的 rootfs 分区挂载到 Mac 上,确认了
/etc/inittab的配置和它启动的/etc/main脚本都是有效的,排除了设备侧的软件问题。然后在硬件上,我确认了电路不存在虚焊,并实验改用树莓派与 Mac 做串口通信,确认了此时终端可以正常使用,排除了外围硬件的问题。
最后,我发现与树莓派通信时,Mac 侧按键可以让转接头的 RX 和 TX 灯都闪亮。但连接 Miyoo 时,按键时只会让 Mac 侧的 TX 发送端闪亮,没有收到本应经过 RX 返回的信号。因此推测问题在于这个接口的 RX 线路 。我整理了详尽的现象询问司徒后,得到的回复是:UART 与耳机共用,必须重新编译 Linux 内核才行。
好吧,我居然一路 debug 碰到了个物理电路设计的硬件问题。那就接着改 Linux 内核呗。
定制 Linux 内核驱动
根据司徒提供的线索,我开始尝试将音频驱动从 Miyoo 的 Linux 内核源码中屏蔽掉。我们都知道 Linux 是宏内核,大量硬件驱动的源码全都在里面。简单改改驱动,其实不是件多高大上的事情。
首先,我们至少要能把内核编译出来。注意内核不等于嵌入式 Linux 的系统。一个完整的嵌入式 Linux 系统,应该大致包括这几部分:
Kernel - 包含操作系统的核心子系统,以及所需的硬件驱动
Rootfs - 根文件系统,大致就是根目录下面放的那堆二进制应用
UBoot - 引导加载程序,本身相当于一个非常简单的操作系统
我们只是想禁用掉音频驱动,因此只需要重新编译出 Kernel 就行。Kernel 会编译成名为 zImage 的镜像。这个过程的用户体验其实和编译普通的 C 项目没有什么区别,也就是先配好编译参数和环境变量,然后 make 就行了:
make miyoo_defconfig
make zImage
在我 MacBook Pro 的 Docker 里,大致需要 12 分钟才能把内核编译出来。这里贴个图,纪念下职业生涯第一次编译出的 Linux 内核:

编译通过后,我非常开心地直接开始尝试修改内核的驱动(注意我没有真机测试这个第一次编译出的内核,这是伏笔)。经过一番研究,我发现嵌入式 Linux 的硬件都是通过一种名叫设备树的 DSL 代码来描述的,修改这种 DSL 应该就能使 Kernel 不支持某种硬件了。于是我找到了 Miyoo 设备树里的音频部分,将其注释掉,尝试编译出不包括音频的设备树描述文件,把它装上去。
然后机器启动后就黑屏了。
……
看来设备树的配置不管用,我又想到了直接修改音频驱动的 C 源码。它就是内核项目的 /sound/soc/suniv/miyoo.c,里面的 C 代码看起来并不难,但我尝试了不下七八种修改手法,就是编译不出一份正常的镜像:有时候可以解决 UART 无法登陆的问题,有时则不行,并且黑屏问题也始终没有解决。为什么音频驱动会影响视频输出,这让我十分困扰,甚至一度怀疑起了我的工具链。
最终,我得到了一个令人震惊的结论:
这份内核代码哪怕完全不改,编译出来都是会黑屏的。
……
于是,我换了社区版本的内核代码,屏幕顺利点亮,问题解决。
但是,社区版本的内核是老外维护的,他们的用户习惯里,A 键和 B 键的定义是相反的(小时候玩过美版 PSP 的同学应该知道我是什么意思)。于是我又开始折腾,尝试如何交换 A 和 B 的位置。
结果,我遇到了一个更加诡异的问题,那就是只要我在键盘驱动里交换 A 和 B 的值,要么不生效,要么就总会有其它的按键失灵,不能完全交换成功。
于是,我去仔细研究了按键驱动所对应的 Linux 内核 GPIO 部分的文档,检查了 init 和 scan 阶段下这一驱动的行为,甚至怀疑按键的宏定义会影响位运算的结果……结果都没什么卵用。但我还是找到了个能显示按键信息的调试用宏,之前一直懒得浪费一次编译时间去打开它,干脆把它启用后再试一下。
结果,我又得到了一个令人震惊的结论:
这份代码把变量的名字写错了。该对换的变量不是 A 和 B,是 A 和 X。
……
看来我果然没有写 Linux 内核的天赋,还是老老实实回去移植 JS 引擎吧。
移植 JS 引擎
搞定内核层以后,我们就可以轻松登录进 Miyoo 的控制台了。用户名是 root,没有密码。绕了这么多弯子,第一次登陆成功的时候还是让人很激动的。截图纪念一下:
接下来应用层的 JS 引擎移植,对我来说就是轻车熟路了。这里祭出我们的老朋友 QuickJS 引擎,它作为一个超迷你的嵌入式 JS 引擎,甚至已经兼容了不少 ES2020 里的特性。由于它没有任何第三方依赖,把它迁移到 Miyoo 上,其实并没有多难,给 Makefile 加上个 CROSS_PREFIX=arm-miyoo-linux-uclibcgnueabi- 的编译配置,就可以用交叉编译器来编译它了。
交叉编译自然也很难一帆风顺。这里我遇到的编译错误,都来自嵌入式环境下的标准库能力缺失。不过其实也只有这两点:
malloc_usable_size不支持,这会影响内存度量数据的获取,但 JS 照样可以跑得很欢。顺便一提从源码来看,这个能力在 WASM 里也不支持。所以其实已经有人把 QuickJS 编译成 WASM,玩起 JS in JS 的套娃了。fenv.h缺失,这应该会影响浮点数的 rounding 方式,但实测对Math.ceil和Math.floor无影响。先不管了,反正又不是不能用(喂)
这点小问题,简单 patch 一下相关代码以后就搞定了。编译成功后,把它复制到 rootfs 分区的 /usr/bin 目录下,即可在在 Miyoo 的 Shell 里用 qjs 命令运行 JS 了。这下终于爽了,看我回到主场,噼里啪啦写段 JS 测试一下:
import { setTimeout } from 'os'
const wait = timeout =>
new Promise(resolve => setTimeout(resolve, timeout))
let i = 0
;(async () => {
while (true) {
await wait(2000)
console.log(`Hello World ${i}!`)
i++
}
})()
截图为证,我真的是在 Miyoo 里面跑的:

但是这个 JS 代码的运行结果又该怎么输出到真机上呢?我们知道 Linux 上有默认的 /dev/console 系统控制台和 /dev/tty1 虚拟终端,因此只要在启动时的 inittab 里把 console::respawn:/etc/main 改成 tty1::respawn:/etc/main,就可以输出到图形化的虚拟终端了。像这样:

支持 VSCode 调试器
JS 都能跑了,日志都能看了,还要啥自行车呢?当然是支持给它下断点啊!我本来一直以为断点调试必须要用 V8 那样的重型引擎配合 Chrome 才行,结果让我惊喜的是,社区已经为 QuickJS 实现了一个支持调试器的 fork,这样只需要 VSCode 作为调试器前端,就能调试 QuickJS 引擎运行时的代码了。配合 VSCode 的 Remote 功能,这玩意的想象空间实在很大。
这一步的支持是全文中最省事的。因为我只在 Mac 上做了个验证,编译一次通过,没什么好说的。效果像这样:
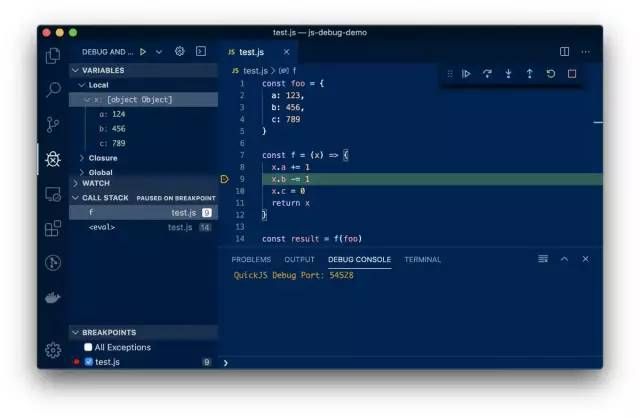
图中你看到的 VSCode Debugger 背后可不是 V8,而是正经的 QuickJS 引擎噢。我也用 VSCode 调试过 Dart 和 C++ 的代码,当时我没有想到过这样的一套调试器该如何由一门第三方语言接入。搜索之后我发现,微软甚至已经为编辑器与任意第三方语言之间设计了一个名为 Debug Adapter Protocol 的通用调试协议,它很具备启发性。原来我觉得十分高大上的编程语言调试系统,也是能用断点、异常等概念来抽象化和结构化,并设计出通用协议的。微软在工程设计和文档上的积累真不是盖的,赞一个。
现在,我已经将这个支持 VSCode 调试的 QuickJS 版本编译到了 Miyoo 上,只是还没有做过实际的调试——有了定制内核驱动时不停给自己挖坑的教训,我现在自然不敢立 Flag 说它能用了(捂脸)
到此为止,本次实验所关注的能力都已经得到基本的验证了。相应的 Docker 镜像我也已发布到 GitHub,参见 MiyooSDK。也欢迎大家的交流。
后记
这次写的又是一篇长文,这整套工作远没有文章写下来那么一气呵成,而是断断续续地逐步完成的。现在我手上的东西,还只是个初步的工程原型,有很多工作还可以继续深入。比如这些地方:
还不支持 USB 通信,不能 SSH 登录
还没有为 JS 实现 C 的 GUI 渲染器
还没有移植 JS 的上层框架
不过,只要有热情持续深入技术,那么收获一定不会让你失望。像大家眼里神秘的 Linux 内核,其实也是个有规可循的程序。即便是我这样本职写 JavaScript 的玩票选手,照样可以拿通用的科学方法论来实验分析它,而这个过程就像玩密室逃脱或者解谜游戏一样有趣——你知道问题一定能解决,只要用逻辑推理,找到房间里隐藏的那个开关就行。
我要特别感谢司徒,他为开源掌机的发展作出了巨大的贡献。这次最为疑难的硬件电路 bug,也是由他提供了关键信息后才最终得以解决的。很多时候我们缺的不是繁冗琐碎的入门指南,而是来自更高段位者,一两句话让你茅塞顿开的点拨。他就是这样一位令人尊敬的技术人。
这里跑个题,淘宝上有不少用司徒系统的名义销售掌机的店铺,这些商家其实已经与他本人完全无关了。虽然我仍然很推荐大家入手这个只要一百多块钱的 Miyoo 掌机用于娱乐或技术研究,但我还是有些感慨。所谓遍身罗绮者,不是养蚕人,大抵如此吧。
从搭建工具链到焊接电路板,再到定制 Linux 内核和 JS 引擎,这些技术本身固然都有点门槛。但富有乐趣的目标,总能让我们更有动力去克服中途的各种困难。我相信兴趣和热情总是最能刺激求知欲的,而永不知足的求知欲,才能驱动我们不停越过一个个山丘。毕竟乔帮主提过的那句名言是怎么说的来着?
Stay Hungry. Stay Foolish.
我主要是个前端开发者。如果你对 Web 编辑器、WebGL 渲染、Hybrid 架构设计,或者计算机爱好者的碎碎念感兴趣,欢迎关注我噢 :)
扫码关注,干货内容第一时间给你

-- 前端技术江湖 --
点一下从此无 bug