深度学习(二)——经典网络LeNet+Pytorch实现
LeNet神经网络介绍
LeNet神经网络由深度学习三巨头之一的Yan LeCun提出,他同时也是卷积神经网络 (CNN,Convolutional Neural Networks)之父。LeNet主要用来进行手写字符的识别与分类,并在美国的银行中投入了使用。LeNet的实现确立了CNN的结构,现在神经网络中的许多内容在LeNet的网络结构中都能看到,例如卷积层,Pooling层,ReLU层。虽然LeNet早在20世纪90年代就已经提出了,但由于当时缺乏大规模的训练数据,计算机硬件的性能也较低,因此LeNet神经网络在处理复杂问题时效果并不理想。虽然LeNet网络结构比较简单,但是刚好适合神经网络的入门学习。
LeNet神经网络结构
LeNet的神经网络结构图如下:

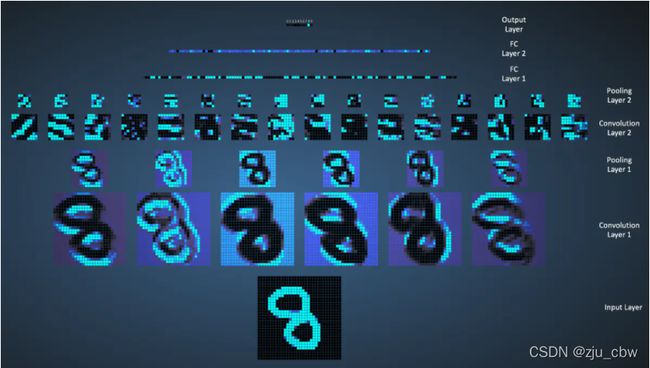
LeNet网络的执行流程图如下:
LeNet各层的参数变化
-
C1
输入大小:32*32
核大小:5*5
核数目:6
输出大小:28*28*6
训练参数数目:(5*5+1)*6=156
连接数:(5*5+1)*6*(32-2-2)*(32-2-2)=122304 -
S2
输入大小:28*28*6
核大小:2*2
核数目:1
输出大小:14*14*6
训练参数数目:2*6=12,2=(w,b)
连接数:(2*2+1)*1*14*14*6 = 5880 -
C3
输入大小:14*14*6
核大小:5*5
核数目:16
输出大小:10*10*16
训练参数数目:6*(3*5*5+1) + 6*(4*5*5+1) + 3*(4*5*5+1) + 1*(6*5*5+1)=1516
连接数:(6*(3*5*5+1) + 6*(4*5*5+1) + 3*(4*5*5+1) + 1*(6*5*5+1))*10*10=151600 -
S4
输入大小:10*10*16
核大小:2*2
核数目:1
输出大小:5*5*16
训练参数数目:2*16=32
连接数:(2*2+1)*1*5*5*16=2000 -
C5
输入大小:5*5*16
核大小:5*5
核数目:120
输出大小:120*1*1
训练参数数目:(5*5*16+1)*120*1*1=48120(因为是全连接)
连接数:(5*5*16+1)*120*1*1=48120 -
F6
输入大小:120
输出大小:84
训练参数数目:(120+1)*84=10164
连接数:(120+1)*84=10164
LeNet第三层(卷积操作)
值得关注的是LeNet第三层,LeNet第三层(C3层)也是卷积层,卷积核大小仍为5*5,不过卷积核的数量变为16个。第三层的输入为14*14的6个feature map,卷积核大小为5*5,因此卷积之后输出的feature map大小为10*10,由于卷积核有16个,因此希望输出的feature map也为16个,但由于输入有6个feature map,因此需要进行额外的处理。输入的6个feature map与输出的16个feature map的关系图如下:
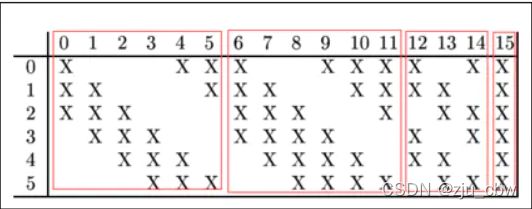
如上图所示,第一个卷积核处理前三幅输入的feature map,得出一个新的feature map。
LetNet(Pytorch版本)
model.py
import torch.nn as nn
import torch.nn.functional as F
class LeNet(nn.Module):
def __init__(self):
super(LeNet,self).__init__()
self.conv1 = nn.Conv2d(3,16,5)
self.pool1 = nn.MaxPool2d(2,2)
self.conv2 = nn.Conv2d(16,32,5)
self.pool2 = nn.MaxPool2d(2,2)
self.fc1 = nn.Linear(32*5*5,120)
self.fc2 = nn.Linear(120,84)
self.fc3 = nn.Linear(84,10)
def forward(self, x):
x = F.relu(self.conv1(x))#input(3,32,32) output(16,28,28)
x = self.pool1(x) #output(16,14,14)
x = F.relu(self.conv2(x)) #output(32,10.10)
x = self.pool2(x) #output(32,5,5)
x = x.view(-1,32*5*5) #output(5*5*32)
x = F.relu(self.fc1(x)) #output(120)
x = F.relu(self.fc2(x)) #output(84)
x = self.fc3(x) #output(10)
return x
#model调试
import torch
#定义shape
input1 = torch.rand([32,3,32,32])
model = LeNet()#实例化
print(model)
#输入网络中
output = model(input1)

train.py
#train.py
import torch
import torchvision
import torch.nn as nn
import torch.optim as optim
import torchvision.transforms as transforms
from torchvision import transforms, datasets, utils
import matplotlib.pyplot as plt
import numpy as np
#device : GPU or CPU
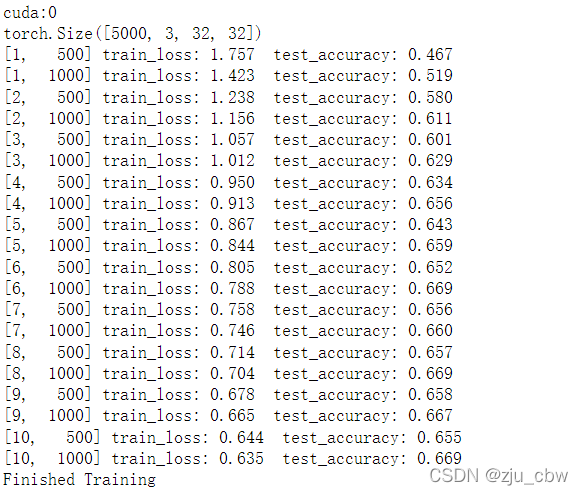
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print(device)
transform = transforms.Compose(
[transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
# 50000张训练图片
train_set = torchvision.datasets.CIFAR10(root='./data', train=True,
download=False, transform=transform)
train_loader = torch.utils.data.DataLoader(train_set, batch_size=36,
shuffle=False, num_workers=0)
# 10000张验证图片
val_set = torchvision.datasets.CIFAR10(root='./data', train=False,
download=False, transform=transform)
val_loader = torch.utils.data.DataLoader(val_set, batch_size=5000,
shuffle=False, num_workers=0)
val_data_iter = iter(val_loader)
val_image, val_label = val_data_iter.next()
print(val_image.size())
# print(train_set.class_to_idx)
# classes = ('plane', 'car', 'bird', 'cat',
# 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
#
#
# #显示图像,之前需把validate_loader中batch_size改为4
# aaa = train_set.class_to_idx
# cla_dict = dict((val, key) for key, val in aaa.items())
# def imshow(img):
# img = img / 2 + 0.5 # unnormalize
# npimg = img.numpy()
# plt.imshow(np.transpose(npimg, (1, 2, 0)))
# plt.show()
#
# print(' '.join('%5s' % cla_dict[val_label[j].item()] for j in range(4)))
# imshow(utils.make_grid(val_image))
net = LeNet()
net.to(device)
loss_function = nn.CrossEntropyLoss()
#定义优化器
optimizer = optim.Adam(net.parameters(), lr=0.001)
#训练过程
for epoch in range(10): # loop over the dataset multiple times
running_loss = 0.0 #累加损失
for step, data in enumerate(train_loader, start=0):
# get the inputs; data is a list of [inputs, labels]
inputs, labels = data
#print(inputs.size(), labels.size())
# zero the parameter gradients
optimizer.zero_grad()#如果不清除历史梯度,就会对计算的历史梯度进行累加
# forward + backward + optimize
outputs = net(inputs.to(device))
loss = loss_function(outputs, labels.to(device))
loss.backward()
optimizer.step()
# print statistics
running_loss += loss.item()
if step % 500 == 499: # print every 500 mini-batches
with torch.no_grad():#上下文管理器
outputs = net(val_image.to(device)) # [batch, 10]
predict_y = torch.max(outputs, dim=1)[1]
accuracy = (predict_y == val_label.to(device)).sum().item() / val_label.size(0)
print('[%d, %5d] train_loss: %.3f test_accuracy: %.3f' %
(epoch + 1, step + 1, running_loss / 500, accuracy))
running_loss = 0.0
print('Finished Training')
save_path = './Lenet.pth'
torch.save(net.state_dict(), save_path)