第七章 图像分割
本章主要内容为基于边缘的图像分割,包括图像点、线、边缘的分割;一阶边缘检测算子:Roberts、Prewitt、Sobel、Isotropic、Sobel、方向Sobel、Kirsch;二阶边缘检测算子LoG;过零点检测原理;Canny边缘检测。基于区域图像分割:阈值分割法;基于区域增长的分割;基于区域分裂与合并的分割。科普内容为Marr计算机视觉原理。
本章要求重点掌握内容为图像分割的基本概念,图像点、线、边缘检测的基本原理,一阶边缘检测算子的基本原理和特点,二阶边缘检测算子的基本原理和特点,过零点检测的基本原理,阈值分割法的基本原理,区域增长的基本原理。本章科普内容为图像分割在图像分析系统中的地位,基于边缘的图像分割基本概念,基于区域的图像分割的基本概念,Marr计算机视觉原理。
7.1 图像分割引言
图像分割属于图像处理当中的中级处理,图像分析系统的构成如下图所示。
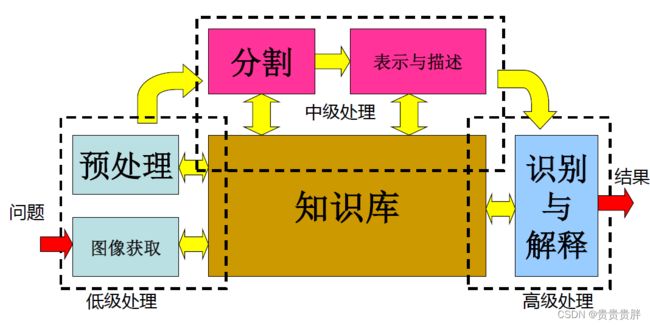
图像分割是指把图像分解成构成它的部件和对象的过程,有兴趣地定位感兴趣对象在图像中位置和范围。
图像分割的基本策略是基于灰度值的两个基本特性:区域之间的不连续性与区域内部的相似性进行分割。
(1)根据像素值的不连续性:先找到点、线(宽度为1)、边(不定宽度),再确定区域(边缘)。

(2)根据像素值的相似性:通过选择阈值,找到灰度值相似的区域,区域的外轮廓就是对象的边(区域)
7.2 基于边缘的图像分割
7.2.1 点的检测
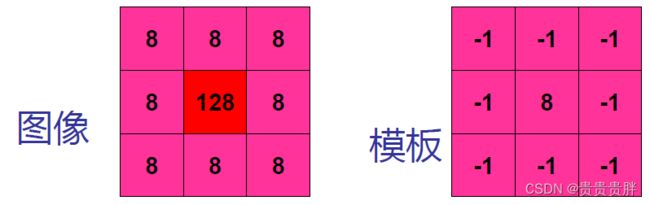
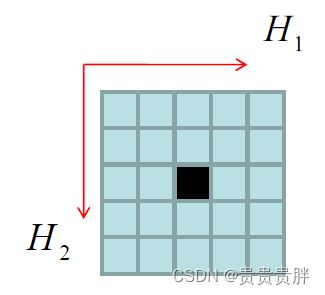
用空域的高通滤波器来检测孤立点:
![]()
设阈值T=64,R>T,则目标点为孤立点。
7.2.2 线的检测
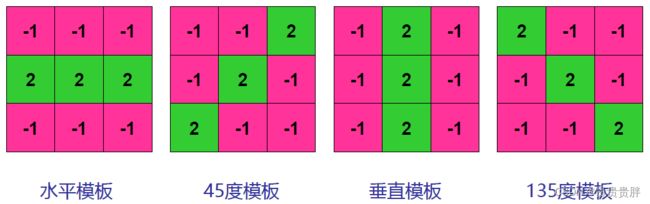
通过比较典型模板的计算值,确定一个点是否在某个方向上的线上:
对示例图像进行线的检测:

用四种模板分别进行计算:
(1)水平模板:
![]()
(2)45度模板:
![]()
(3)垂直模板:
![]()
(4)135度模板:
![]()
线的检测——算法描述:依次计算4个方向上的典型检测模板,得到Ri (i=1,2,3,4),如果|Ri|>|Rj|(i≠j),那么这个点被称为在方向上更接近模板i所代表的线;
7.2.3 边的检测
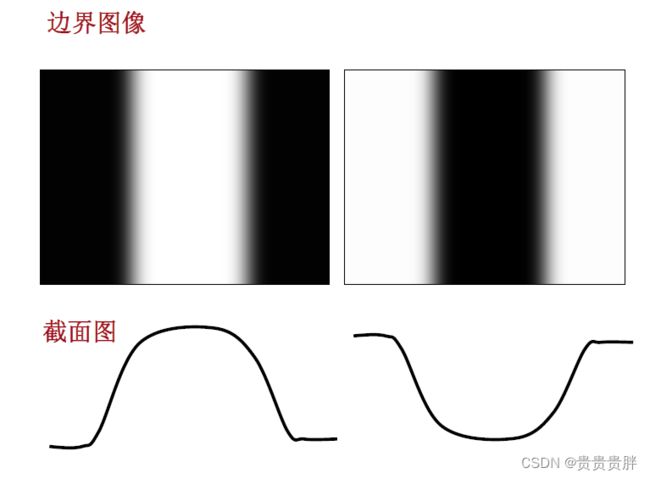
边界的定义:是两个具有相对不同灰度值特性的区域的边界线。
边界检测适用于:假定问题中的区域非常类似,两个区域之间的过渡,仅仅根据灰度的不连续性便可确定。
边界检测不适用于:当假定问题中的区域没有非常类似,阈值分割技术一般来说比边缘检测更加实用。
边缘检测的基本思想:使用计算局部微分算子来完成边的检测。
7.2.3.1 一阶边缘检测算子
边缘是指图像中灰度发生急剧变化的区域。是图像的一种紧描述(compact description),是图像最基本特征,包含图像中用于识别的有用信息,具有明显的视觉意义。
目标边缘、图像纹理甚至噪声都能成为边缘。
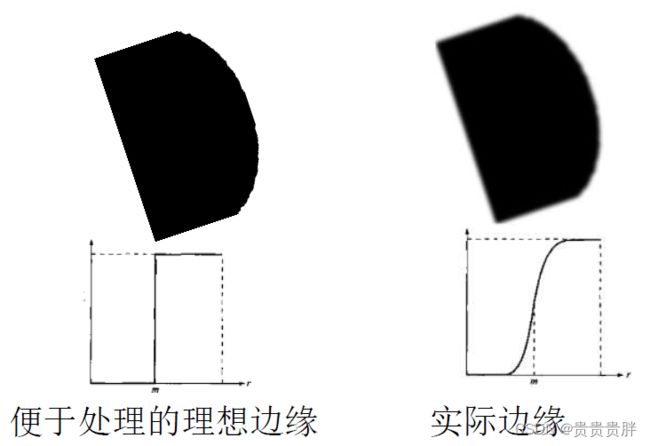
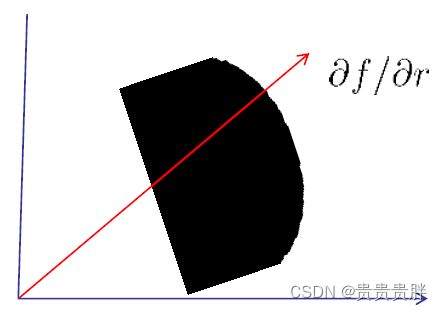
边缘检测:求图像f中各点梯度的局部最大值和方向来确定边缘。
方向导数:

当 ![]() 取最大值时:
取最大值时:
![]()
梯度方向:
![]()
幅值:
![]()
梯度离散化计算:
(1)后向差分:
![]()
![]()
(2)前向差分:
![]()
![]()
![]()
![]()
![]()
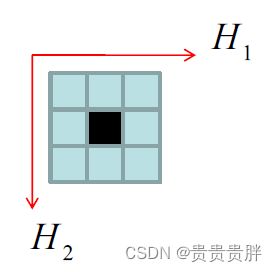
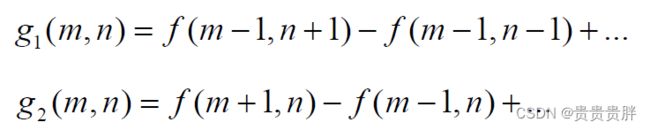
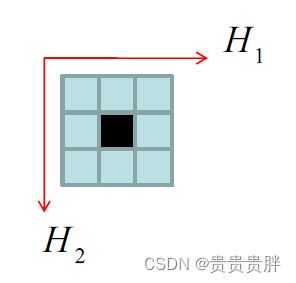
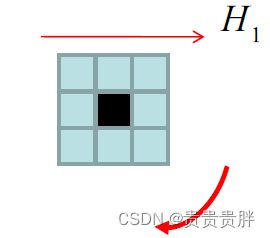
梯度算子的推广:梯度检测实质上是在图像的两个正交方向上分别作差分运算,然后综合起来查看图像灰度变化的剧烈程度。设两个方向为H1和H2,梯度为g1(m,n), g2(m,n),则
![]()
![]()
梯度方向:

幅值:
![]()
![]()
![]()
常用一阶边缘检测算子:
1. Roberts


![]()
![]()
梯度方向:

幅值:与梯度算子定义相同;
特点:(讨论要点)方向、模板尺寸,定位准确程度,有无平滑因素,对噪声敏感程度。
2.Prewitt
梯度方向:与梯度算子定义相同;
幅值:与梯度算子定义相同;
特点:(讨论要点)方向,模板尺寸,定位准确程度,有无平滑因素,对噪声敏感程度。
3. Sobel



梯度方向:与梯度算子定义相同;
幅值:与梯度算子定义相同;
特点:(讨论要点)方向,模板尺寸,定位准确程度,有无平滑因素,对噪声敏感及抑制程度。
4. 各向同性Sobel


梯度方向:与梯度算子定义相同;
幅值:与梯度算子定义相同;
特点:(讨论要点)方向,模板尺寸,定位准确程度,有无平滑因素,对噪声敏感及抑制程度, 权重影响。
权值与邻点与中心点的距离成正比或反比,检测沿不同方向边缘时梯度幅度一致或不一致。
5. 多方向Sobel
检测特定方向的边缘(仍从梯度角度出发)

6. Kirsch
Kirsch使用8个模板来确定梯度幅度值和梯度方向:

图像中各点与8个模板逐一卷积,最大响应为输出:
![]()
梯度方向:最大响应值对应的模板序号(量化方向)
![]()
7.2.3.2 二阶边缘检测算子
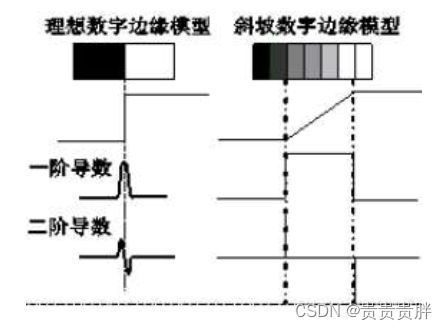
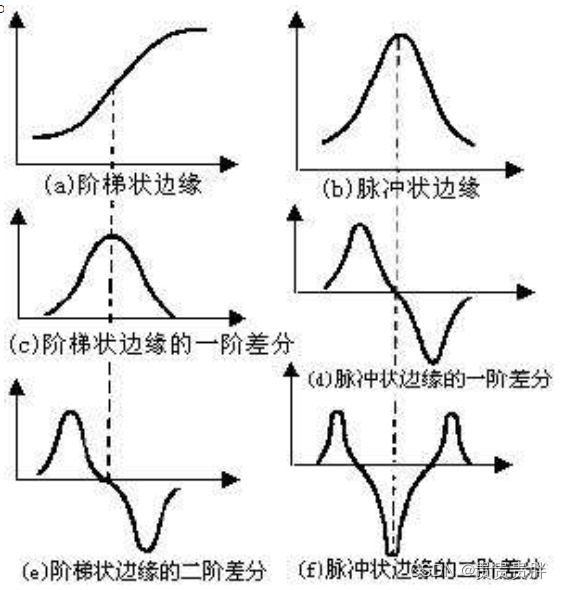
图像的二阶微分:理论上,图像阶梯状边缘处的一阶微分(梯度)对应极值点,通过一阶导数可以确定;对于图像脉冲状边缘,一阶导数较难确定,需要借助二阶导数。
(1)图像的二阶微分离散化求解,需考虑像素距离h:
![]()
![]()
` 改为双向差分,偏移当前点:
![]()

模板表达:
![]()
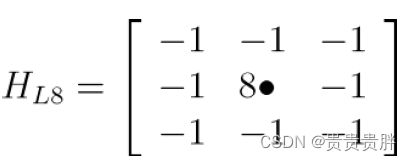
(2) 图像的二阶微分梯度幅值:

该算子也称为Laplace算子![]() ,其特点是具有旋转不变性:
,其特点是具有旋转不变性:

模板表达:


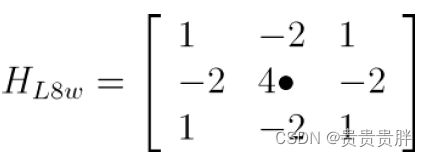
(3)包含交叉方向的Laplace算子:

模板表达:
考虑距中心点距离的模板表达:
拉普拉斯算子缺点:(1)对噪声的敏感;(2)会产生双边效果;(3)不能检测出边的方向。
拉普拉斯算子的应用:拉普拉斯算子不能直接用于边的检测,通常只起辅助作用;检测一个像素是在边的亮的一边还是暗的一边,利用零跨越,确定边的位置。
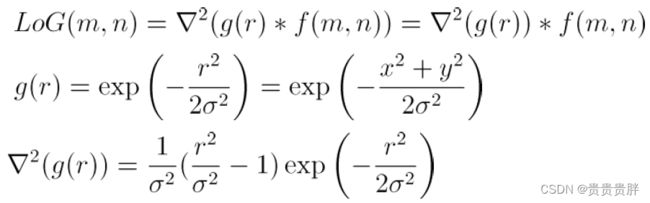
7.2.3.3 图像过零点检测(Marr-Hildreth算子)
图像边缘处的二阶微分应该为零,确定过零点(Zero-Crossing)的位置要比确定极值点容易得多,也更为精确。但二阶微分对噪声更敏感,为抑制噪声,先平滑滤波然后作二次微分,通常用高斯函数作平滑滤波,因此有LoG(Laplacian of Gaussian)算子。用双高斯差函数DoG(Difference of Gaussians)对图像作卷积来近似检测边缘点(过零点)。
过零点的检测所依赖的范围与参数有关,但边缘位置与sigma的选择无关,若只关心全局性的边缘,可选取较大范围(如sigma=4时,邻域接近40个像素宽)来获取明显的边缘。
过零点检测更为可靠,不易受噪声影响,但缺点是对形状作了过分平滑,会丢失明显角点;还有产生环形边缘的倾向。
7.2.3.4 Canny边缘检测算法
Canny边缘检测算法是最优的阶梯型边缘(step edge)检测算法,三个标准下,Canny边缘检测算子对受白噪声影响的阶跃型边缘最优:
(1)检测标准:不丢失重要的边缘,不应有虚假的边缘;
(2)定位标准:实际边缘与检测到的边缘位置之间的偏差最小;
(3)单响应标准:将多个响应降低为单个边缘响应;
Canny边缘检测算子是基于如下概念:边缘检测算子针对1D信号表达,对检测标准和定位标准最优;如果考虑第三个标准(多个响应),要通过数值优化得到最优解。该最优滤波器可有效地近似为标准差为σ的高斯平滑滤波器的一阶微分,误差小于20%。这与LoG边缘检测算子很相似。将边缘检测算子推广到2D情况。阶跃边缘由位置、方向和可能的幅度(强度)来确定。
Canny边缘检测算法:
(1)对于递增的标准差(重复(2)到(6)步骤);
(2)将图像f与尺度为高斯函数作卷积;
(3)对图像中的每个像素,估计局部边缘法向量n;
(4)用非最大抑制公式找到边缘位置;
(5)用公式计算边缘强度:
(6)对边缘图像作滞后阈值化处理,消除虚假响应;
(7)用特征综合方法,收集来自多尺度的最终的边缘信息。
7.3 图像分割:基于区域的分割法
7.3.1 阈值分割法
阈值分割法可分为:
(1)通过交互方式得到阈值;
(2)通过直方图得到阈值;
(3)通过边界特性选择阈值;
(4)简单全局分割;
(5)分割连通区域;基于多个变量的阈值;
7.3.1.1 通过直方图取得阈值
通过直方图得到阈值的依据:边界上的点的灰度值出现次数较少。
通过直方图取得阈值的取值方法:取直方图谷底(最小值)的灰度值为阈值T。
通过直方图取阈值的缺点:会受到噪声的干扰,最小值不是预期的阈值,而偏离期望的值。
通过直方图取阈值方法的改进:1)取两个峰值之间的某个固定位置,如中间位置上。由于峰值代表的是区域内外的典型值,一般情况下,比选谷底更可靠,可排除噪声的干扰。2)对噪声的处理,对直方图进行平滑处理。

7.3.1.2 通过边界特性选择阈值
通过边界特性选择阈值,具有以下优点:
(1)在前景和背景所占区域面积差别很大的时候,不会造一个灰度级的波峰过高、而另一个过低;
(2)边缘上的点在区域内还是区域外的概率是相等的,因此可以增加波峰的对称性;
(3)基于梯度和拉普拉斯算子的像素,可以增加波峰的高度;
通过边界特性选择阈值,该算法的实现如下:
(1)对图像进行梯度计算,得到梯度图像;
(2)得到梯度值最大的那一部分(比如10%)的像素直方图;
(3)通过直方图的谷底,得到阈值T;
如果使用拉普拉斯算子,不通过直方图,直接得到阈值,方法是使用拉普拉斯算子过滤图像,将0跨越点对应的灰度值为阈值T。
7.3.1.3 简单全局阈值分割
简单全局阈值分割的基本思想是用前述方法获得阈值T,并产生一个二值图,区分出前景对象和背景。
简单全局阈值分割的算法实现如下:
(1)规定一个阈值T,逐行扫描图像;
(2)凡灰度级大于T的,颜色置255;凡灰度级小于T的,颜色置0;
7.3.1.4 分割连通区域
分割连通区域的基本思想是用前述方法获得阈值T,并产生一个二值图,区分出单独的连通前景对象和背景区域。
分割连通区域的算法实现如下:
(1)规定一个阈值T,上下左右4个方向进行逐行扫描图像;
(2)凡灰度级大于T的,颜色置255;凡灰度级小于T的,颜色置0;
7.3.1.5 基于多个变量的阈值
基于多个变量的阈值的基本思想:把前面的方法扩展到多维空间,则寻找波谷的过程变为寻找点簇的过程。
基于多个变量的阈值的算法实现:通过各维分量波谷之间进行逻辑与运算,从波谷重合的点,得到实际的阈值T。
7.4 图像分割:面向区域的分割
基本概念:面向区域的分割的目标是将区域R划分为若干子区域R1、R2、···、Rn,这些子区域满足3个主要条件:
(1)完备性:![]()
(2)连通性:每一个Ri都是一个连通区域;
(3)独立性:对于任意i≠j,![]()
面向区域的分割的方法:
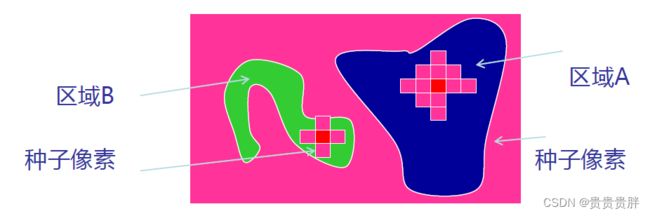
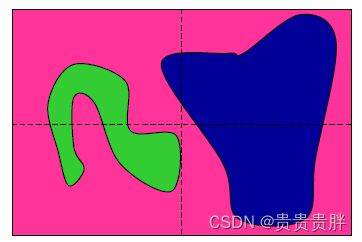
(1)像素几何的区域增长:
① 根据图像的不同应用选择一个或一组种子,它或者是最亮或最暗的点,或者是位于点簇中心的点;
② 选择一个描述符(条件);
③ 从该种子开始向外扩张,首先把种子像素加入结果集合,然后不断将与集合中各个像素连通、且满足描述符的像素加入集合;
④ 上一过程进行到不再有满足条件的新结点加入集合为止;
(2)区域分裂与合并:
① 对图像中灰度级不同的区域,均分为四个子区域;
② 如果相邻子区域所有像素的灰度级相同,则将其合并;
③ 反复进行上两步操作,直至不再有新的分裂与合并为止;
改进方法:根据小区域内的灰度分布的相似性进行区域合并的方法,称为统计假说检测法:
(1)把图像分块,形成大小为n*n的小矩形区域;
(2)比较邻接区域的灰度直方图,如果灰度分布情况相似,就合并为一个区域;
(3)反复进行(2)的操作,直至区域合并完成为止;
P.S 如果n过大,区域形状不自然,小的对象物体就会漏过;若n过小,可靠性就会减弱。n应设置为5~10的范围内。
7.5 Marr计算机视觉理论框架
计算机视觉是近20~30年出现的新技术,其目标是利用场景的一幅或几幅图像来达到理解场景内容,其终极目标就是模拟一套智能系统,类似人的眼睛和大脑的功能,能对场景的内容进行有选择性的处理、主动性的识别,目的性的观察等等。
计算机视觉的基本假设是:可以用计算的方式来模拟人类的视觉机制。
马赫带(Mach Band)现象:一种主观的边缘对比效应。当观察两块亮度不同的区域时,边界处亮度对比加强,使轮廓表现得特别明显。

V1视觉皮层区处理以后,目前假说认为有三条以上视觉路径分别处理运动、形状、颜色。

Marr提出开始到现在一直是计算机视觉的基本研究理论,他主要将视觉研究从信号处理的角度进行理解,将视觉研究分为三个层次:
(1)理论层次——计算理论计算的目的是什么?为什么它是合适的?它是依据什么决策实施的?
(2)算法表达——计算的输入与输出采取什么表达形式?计算理论如何完成?
(3)硬件实现——硬件实现表达与算法如何物理实现?
Marr同时从信息处理将视觉分为三个阶段:原始信息、2.5维信息及三维信息:
(1)初始简图(Primal Sketch):提取出明显的轮廓和边缘信息;
(2)2.5维简图(2.5D Sketch):提取图像中物体在3D世界中的深度信息和其表面各处的方向信息;
(3)以物体为中心的3维表示(3D Representation):得到场景的三维几何信息;
