自动驾驶决策——决策基本概念
文章目录
- 1. 前言
- 2. 规划决策模块
- 3. 行为决策模型
-
- 3.1 决策模型
- 3.2 规则模型
-
- 3.2.1 基于逻辑判断的决策模型
- 3.2.2 基于状态机的决策模型
- 3.2.3 基于决策树的决策模型
- 3.2.4 小结
- 3.3 效用模型
-
- 3.3.1 行为选择模型
- 3.3.2 路径选择模型
- 3.3.3 预测优选模型
- 3.3.4 小结
- 附录 —— 驾驶任务(战略、战术与操作)
- 参考文献
- 声明
1. 前言
智能车辆包含环境感知、规划决策、车辆控制三大部分:
环境感知模块用来处理车上传感器的数据,获得自身车辆位置、路网结构、动静态障碍物位置等外界环境信息。
规划决策模块作为智能车辆的大脑,决定智能车辆的驾驶行为以及期望路径。
车辆控制模块将期望速度、转角等转变为车辆执行器控制量,控制车辆沿指定轨迹行驶。
2. 规划决策模块
规划决策模块又可分为任务规划、行为决策与运动规划三个子系统。
任务规划系统考虑道路拥堵、限速、车道宽度以及执行特定操作如换道和 U U U 型弯的理论时间等因素,计算路网中两点间最快路径。
行为决策系统推理生成换道、车道保持、加速、减速等智能车辆的驾驶行为。
运动规划系统考虑车辆运动学与动力学约束,以及环境中动静态障碍物,生成运动轨迹,并优化生成车辆的横纵向控制量发送给车辆控制器控制智能车辆行驶。 智能汽车当前采用的决策系统通常包含两种方法,分别为基于机理的决策控制系统和基于人工智能(端到端)的决策控制系统。
智能汽车当前采用的决策系统通常包含两种方法,分别为基于机理的决策控制系统和基于人工智能(端到端)的决策控制系统。
基于机理的决策控制模型将智能汽车的决策过程分为几个不同的部分,并对每个部分根据机理建模,实现智能汽车的决策和控制。
基于人工智能的算法,特别是端到端的方法,采用一个多层神经网络进行决策控制,实现从传感输入到通过神经网络直接控制输出。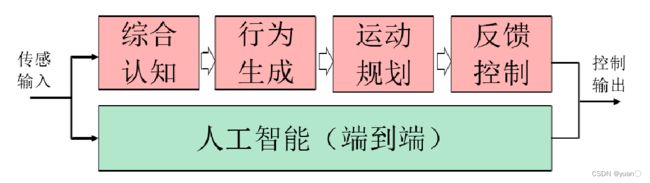
3. 行为决策模型
3.1 决策模型
S A E − J 3016 SAE-J3016 SAE−J3016 将智能汽车决策控制功能分为战术层功能和操作层功能。关于战略、战术以及操作的具体内容点击这里
战术层功能为:对汽车在行驶中进行策略层面的决策,包括决策是否超越其他车辆或者是否换道以及相应的时机,选择合适的速度等。
在基于机理的模型中,实现战术层功能的部分是驾驶行为决策,驾驶行为决策的方案主要有两种,分别为规则模型和效用模型。
3.2 规则模型
基于规则的驾驶行为决策模型多选定判断条件,根据当前的情形判断是否满足条件用来选择最终的驾驶行为。
基于规则的行为决策模型比较简单、规则易编写,建模相对简单、实时性好。
在微观交通仿真和智能汽车发展的早期基于规则的行为决策模型得到广泛的应用。
常见的方法有基于逻辑判断的决策模型、基于有限状态机( F S M FSM FSM)或分层状态机( H S M HSM HSM)的决策模型、基于决策树的决策模型。
3.2.1 基于逻辑判断的决策模型
基于逻辑判断的决策模型通常根据驾驶员的驾驶逻辑设定一系列的判断规则,根据当前汽车所处的环境和状态进行规则判断,最终选定符合判断规则的行为。
if (condition)
............
else
............
3.2.2 基于状态机的决策模型
基于状态机的决策模型通常将智能汽车所处的环境或自身的行为分为几个有限的状态,设定各个状态间相互迁移的条件及事件,决策时根据所处的状态及当前所满足的条件和事件,确定可采取的行为。
智能汽车在道路上行驶时具有明显的行驶场景划分,一些机构和学者采用分层状态机(HSM)模型,其中上层状态机多根据场景,划分为几个不同的状态;下层状态机为每个上层状态内部的状态及状态间迁变。

3.2.3 基于决策树的决策模型
决策树的模型采用树形结构进行表达决策的过程,决策树的节点根据其是否包含子节点分为叶子节点和非叶子节点,叶子节点不包含子节点,非叶子节点包含子节点。
在决策树模型中,每个非叶子节点代表一个判断条件,每个叶子节点代表一个结论。
在采用决策树进行行为决策时,通常每一个非叶子节点代表一个驾驶状态所对应的判断,每一个叶子节点代表一个驾驶行为,从根节点沿着其子节点直到一个叶子节点,代表选择一个驾驶行为的判断逻辑规则。
因此一个决策树可以转换成多个 “ I F − T H E N ” “IF-THEN” “IF−THEN”逻辑规则。
基于决策树的决策模型本质上还是基于规则的决策模型
3.2.4 小结
基于规则的驾驶行为决策模型由于其规则易编辑、可读性强,被广泛用于无人驾驶汽车的行为决策系统中。但是,在用于智能车驾驶行为决策过程中,均会遇到一定的困难和挑战。
基于逻辑判断的决策模型,由于决策逻辑需要提前编写,当场景比较复杂时,决策逻辑需要考虑的因素增多,这使得逻辑编写变得困难。
基于决策树的模型,一定程度上可以解决这种问题,但是当状态空间和行为空间较大时,仍然会使得决策树结构变得复杂。
基于状态机的驾驶行为决策模型由于模型简单、易实现,被广泛应用。但是基于状态机的决策模型需要划分状态及状态间的转移条件,当驾驶场景比较复杂时,状态的确定及状态间的迁变条件变得复杂,难于确定。
3.3 效用模型
基于效用评价的驾驶行为决策模型通常选定一些评价准则,在决策时根据评价准则对可采取的驾驶行为进行评价,确定每个驾驶行为所对应的效用指标值,最后采用最大效用理论,根据各个驾驶行为的评价指标值选择最优的驾驶行为作为汽车将要执行的驾驶行为。
基于效用评价的驾驶行为决策模型通常分为三类,分别是行为选择模型、路径选择模型和预测优选模型。
3.3.1 行为选择模型
行为选择模型多根据当前的场景生成所有可以采取的驾驶行为的集合,之后根据当前的场景按照选定的评价准则对每一个行为所带来的收益进行评价,最终选择收益高的驾驶行为作为最优的驾驶行为。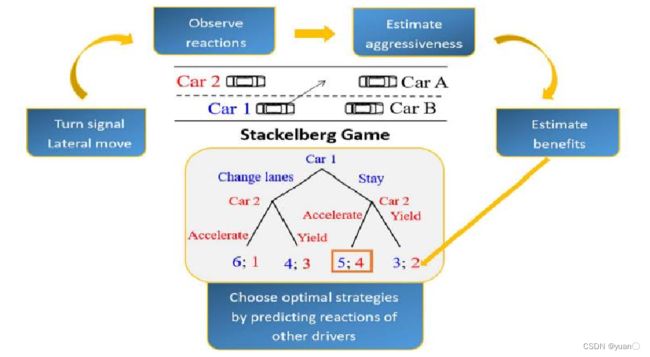
3.3.2 路径选择模型
区别于行为选择模型的直接选择最优的驾驶行为,路径选择模型根据汽车可采取的驾驶行为生成对应的驾驶行为下可采取的行驶路径,对每个路径根据评价指标进行评价,最后选择最优的行驶路径作为最优的驾驶行为及路径。
3.3.3 预测优选模型
预测优选模型在预测时间窗内,按照确定步长预测每个可采取的行为的未来轨迹状态,实时计算各评价指标,最后各步长评价值相加,选取整个预测时间窗内最优值所对应的驾驶行为序列。
区别于前面提到的驾驶行为选择模型和路径选择模型,预测优选的驾驶行为决策模型选择的结果为一个驾驶行为序列而非单个驾驶行为。
预测优选的驾驶行为决策常用的方法有基于蒙特卡洛树搜索的方法和基于部分可观测马尔可夫决策过程 ( P O M D P ) (POMDP) (POMDP)的方法。
3.3.4 小结
基于效用的决策模型无需提前编辑决策规则,因此即使在复杂的场景中仍具有很好的适用性,但是仍然存在一些问题:
路径选择模型选择结果为汽车需要通行的路径,将交通规则的处理和交通参与物的避让混合在一起,未能将战术层决策和操作层决策完全隔离开。
基于预测优化的模型,每个步长都对本车和交通参与物可采取的行为进行预测,这导致状态空间和行为空间较大,决策过程运算量较大,算法实时性差,甚至会产生“维度爆炸”的问题。
缺少对交通法规的系统建模,基于效用的模型多主要考虑处理智能汽车与其他交通参与物的交互即安全性,而对处理交通法规的合法性缺少系统性的建模,并且对其他交通参与物的驾驶习惯、道路的统计特性考虑不够充分。
附录 —— 驾驶任务(战略、战术与操作)

驾驶需要各种决定和行动,其可能涉及或不涉及行进中的车辆,甚至其处于行车道。整体驾驶行为可以分为三种类型的:战略,战术和操作 ( M i c h o n , 1985 ) (Michon,1985) (Michon,1985)。
战略工作涉及行程计划,例如决定是否、何时何地、如何出行、最佳路线等。
战术工作涉及在交通行程中操控车辆,包括决定是否以及何时超越其他车辆,改变车道,选择适当的速度,检查镜子等。
操作涉及可以是预知或先天的瞬时反应,例如转方向盘,制动和加速等进行微观修正以维持交通中的车道位置或避免道路中的突发障碍或危险事件。
参考文献
[1] 自动驾驶路径规划——路径规划入门须知
[2] SAE J3016:驾驶自动化分级(2021年4月,中文版)
声明
本人所有文章仅作为自己的学习记录,若有侵权,联系立删。