cv2.resize()原理详解
以下使用python语言,使用opencv库,解释最近邻插值法和双线性插值法的原理,并通过python代码复现。
文章借鉴:https://blog.csdn.net/jningwei/article/details/78822026
以及 https://www.cnblogs.com/lfri/p/10596530.html
目录
1、cv2.resize函数说明
2、最近邻插值与双线性插值
3、源代码复现
效果对比:
1、cv2.resize函数说明
resize是opencv库中的一个函数,主要起到对图片进行缩放的作用。
example: 以下代码就可以将原图片转化为宽和长分别为300,300的图片。width和height可以自己任意指定,不论大小。
import cv2 as cv width = 300 height = 300 img = cv.imread('图片所在路径') #例如cv.imread("test/1.jpg") img = cv.resize(img,(width,height)) # 默认使用双线性插值法 cv.imshow("img",img) cv.waitKey(0) cv.destroyAllWindows()
参数说明:
resize(InputArray src, OutputArray dst, Size dsize, double fx=0, double fy=0, int interpolation=INTER_LINEAR )InputArray src :输入,原图像,即待改变大小的图像;
OutputArray dst: 输出,改变后的图像。这个图像和原图像具有相同的内容,只是大小和原图像不一样而已;
dsize:输出图像的大小,如上面例子(300,300)。其中,fx和fy就是下面要说的两个参数,是图像width方向和height方向的缩放比例。
fx:width方向的缩放比例
fy:height方向的缩放比例如果fx=0.3,fy=0.7,则将原图片的x轴缩小为原来的0.3倍,将y轴缩小为原来的0.7倍,效果如下:
interpolation(插值):这个是指定插值的方式,图像缩放之后,肯定像素要进行重新计算的,就靠这个参数来指定重新计算像素的方式,有以下几种:
INTER_NEAREST - 最邻近插值
INTER_LINEAR - 双线性插值,如果最后一个参数你不指定,默认使用这种方法
INTER_CUBIC - 4x4像素邻域内的双立方插值
INTER_LANCZOS4 - 8x8像素邻域内的Lanczos插值


2、最近邻插值与双线性插值
(1)INTER_NEAREST | 最近邻插值
opencv使用:python只需要 img = cv.resize(img,(width,height),interpolation=cv.INTER_NEAREST) 一行代码即可
在一维空间中,最近点插值就相当于四舍五入取整。在二维图像中,像素点的坐标都是整数,该方法就是选取离目标点最近的点。
会在一定程度上损失 空间对称性(Alignment)
1 2 3 4 5 6 ----------->> 将3*3的图片转换为5*5 7 8 9 1、使用最近邻插值法,令原图片为n*n,目标图片为m*m,图片从0开始数 则目标图片(i,j)位置的像素值为(n/m)*i,(n/m)*j这两个数四舍五入取整对应的原图片的像素 如目标图片(2,2)位置的像素为(3/5)*2,(3/5)*2,四舍五入取整也就分别是(1,1),而这对应原图片的像素值为5,即目标图片(2,2)的像素值为5 [[1 2 2 3 3] [4 5 5 6 6] [4 5 5 6 6] [7 8 8 9 9] [7 8 8 9 9]](2)INTER_LINEAR | 双线性插值(默认设置)
opencv使用:python只需要 img = cv.resize(img,(width,height),interpolation=cv.INTER_LINEAR) 一行代码即可
在两个方向分别进行一次线性插值。
在图像处理的时候,我们先根据
srcX = dstX* (srcWidth/dstWidth) srcY = dstY * (srcHeight/dstHeight)来计算目标像素在源图像中的位置,这里计算的srcX和srcY一般都是浮点数,比如
f(1.2, 3.4)这个像素点是虚拟存在的,先找到与它临近的四个实际存在的像素点(1,3) (2,3) (1,4) (2,4)写成
f(i+u,j+v)的形式,则u=0.2,v=0.4, i=1, j=3。f(i+u,j+v) = (1-u)(1-v)f(i,j) + (1-u)vf(i,j+1) + u(1-v)f(i+1,j) + uvf(i+1,j+1)保证了 空间对称性


3、源代码复现
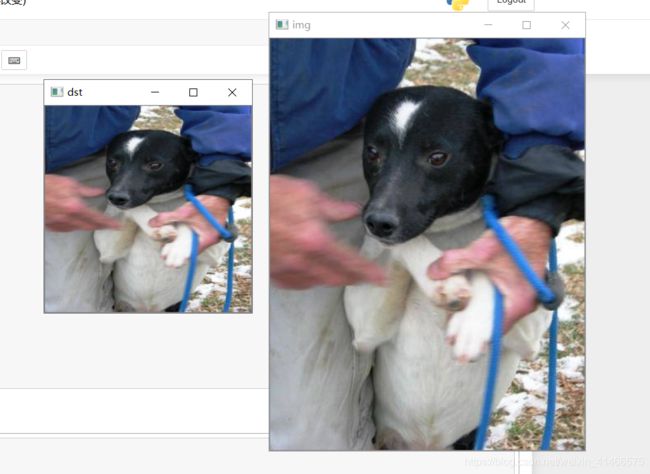
1、最近邻插值
# 将最近邻插值法源代码复现 import cv2 as cv import numpy as np height = 250 width = 250 dst = np.zeros([width,height,3],dtype='uint8') img = cv.imread("test/1.jpg") for c in range(3): for i in range(width): for j in range(height): x = (img.shape[0]/width)*i y = (img.shape[1]/height)*j dst[i,j,c] = img[round(x),round(y),c] # print (dst[i,j,c]) print (type(dst)) print (type(img)) cv.imshow("img",img) cv.waitKey(0) cv.imshow("dst",dst) cv.waitKey(0) cv.destroyAllWindows()效果对比:
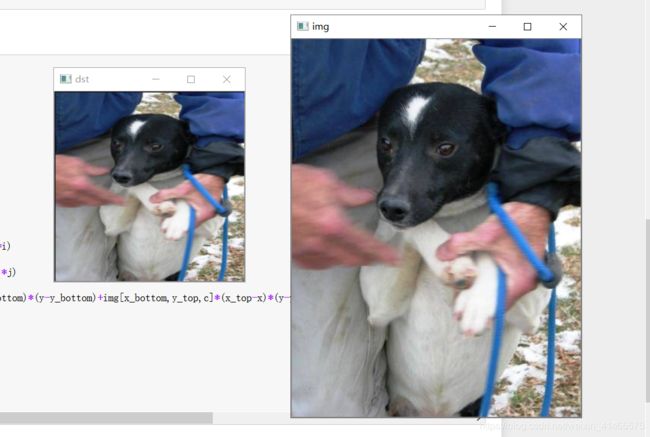
2、双线性插值(默认)
# 将双线性插值法源代码复现 import cv2 as cv import numpy as np import math height = 250 width = 250 dst = np.zeros([width,height,3],dtype='uint8') img = cv.imread("test/1.jpg") for c in range(3): for i in range(width): for j in range(height): x = (img.shape[0]/width)*i y = (img.shape[1]/height)*j x_top = math.ceil((img.shape[0]/width)*i) x_bottom = int((img.shape[0]/width)*i) y_top = math.ceil((img.shape[1]/height)*j) y_bottom = int((img.shape[1]/height)*j) dst[i,j,c] = img[x_top,y_top,c]*(x-x_bottom)*(y-y_bottom)+img[x_bottom,y_top,c]*(x_top-x)*(y-y_bottom)+img[x_bottom,y_bottom,c]*(x_top-x)*(y_top-y)+img[x_top,y_bottom,c]*(x-x_bottom)*(y_top-y) print (type(dst)) print (type(img)) cv.imshow("img",img) cv.waitKey(0) cv.imshow("dst",dst) cv.waitKey(0) cv.destroyAllWindows()效果对比:
可以看出,上述两种不同的插值方式,最终生成的图片差别并不明显